(54) УСТРОЙСТВО УПРАВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКИМ
1
Изобретение относится к пьезоэлектронике, а более точно к устройствам управления пьезоэлектрическими двигателями и может быть использовано в установках различного назначения, в которых применяются пьезодвигатели, например, в устройствах магнитной записи - воспроизведения звука, изображения, цифровой информации и т.д.
Известно устройство управления и стабилизации пьезоэлектрического двигателя (ПЭД) с воздействием регулятора на величину амплитуды и с автоподстройкой частоты питающего напряжения 1 .
Недостатком этого устройства является низкая точность стабилизации скорости ПЭД при сильных колебаниях момента нагрузки.
Известно также.устройство управления пьезоэлектрическим двигателем содержащее датчик скорости, генератор эталонной частоты, два формирователя импульсов, блок вычитания частот, фазовый детектор, корректирующее устройство и усилитель мощности, а -также сумматор, два дополнительных корректирующих устройстДВИГАТЕЛЕМ
ва, управитель частоты, ключ аналоговых сигналов, пороговое устройство и одновибратор. При этом выход блока вычитания частот соединен со входом фазового детектора, выход которого в свою очередь подключен ко входам основного регулятора, а также порогового и первого дополнительного корректирующего устройства,
10 причем выход последнего через ключ аналоговых сигналов соединен с управляющим входом управителя частоты, а выход порогового устройства - ,с управляющим входом упомянутого клю15ча/ выход основного регулятора соединен с усилителем мощности через сумматор, другой вход которого через второе дополнительное корректирующее устройство соединен с автогене20ратором С2.
Однако несмотря на сложность схеыы, данное устройство н.е обеспечивает достаточной точности стабилизации скорости ПЭД.
25
Целью изобретения является повышение точности стабилизации скорости.
Цель достигается тем, что устройство управления пьезоэлектрическим
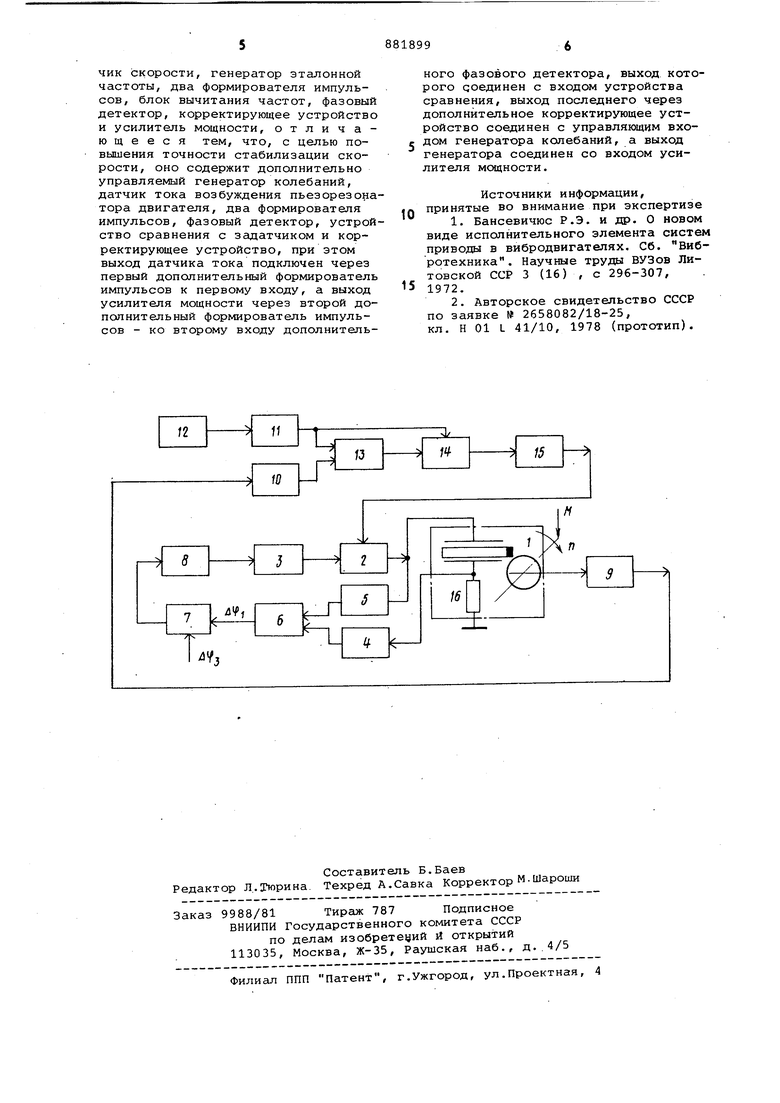
30 двигателем, содержащее датчик скорости, генератор эталонной частоты, два формирователя импу тьсов, блок вычитания частот, фазовый детектор, корректирующее устройство и усилитель мощности, содержит дополнитель управляемый генератор колебаний, датчик тока возбуждения пьезорезонатора двигателя, два формирователя импульсов, фазовый детектор, устрой ство сравнения с задатчиком и корректирующее устройство, при этом вы ход датчика тока подключен через пе вый дополнительный формирователь им пульсов к первому входу, а выход усилителя мощности через второй дополнительный формирователь импульсо ко второму входу дополнительного фа зового детектора, выход которого соединен с входом устройства сравне ния, выход последнего через дополнительное корректирующее устройство соединен с управляющим входом генер тора колебаний, а выход генератора соединен со входом усилителя мслцности. На чертеже представлена схема устройства управления пьезоэлектрическим двигателем. Устройство содержит пьезодвигатель 1, усилитель мощности 2, управляемый генератор 3, формирователи импульсов 4 - 5, фазовый детектор б, устройство сравнения 7, кор ректирующее устройство В, датчик скорости 9, формирователи импульсов 10 и 11, генератор эталонной частоты 12, блок вычитания частот 1 фазовый детектор 14, корректирующее устройство 15, датчик тока возбуждения пьезорезонатора 16. Устройство работает следующим образом. Генератор 3 через усилитель мощности 2 управляет частотой питания пьезорезонатора (ПР) двигателя. Сиг нал датчика тока возбуждения пьезор зонатора 16 (датчик представляет со бой резистор, включенный последовательно с пьезорезонатором) преобразуется формирювателем 4 в последовательность прямоугольных импульсов. Аналогичную функцию выполняет формирователь 5, преобразующий в последовательность прямоугольных импульсов выходное напряжение усили теля 2, т.е. напряжение возбуждения ПР. Выходные сигналы формироваталей 4 .и 5 поступают на входы фазо вого детектора 6, выходное напряжение которого, пропорциональное разности фазовых углов напряжения и тока возбуждения ПР, устройством сравнения 7 сравнивается с напряжением, пропорциональным значению раз ности этих же фазовых углов, соответствующим рабочей частоте двигателя (напряжением задания). На выходе устройства сравнения 7 формируется сигнал, пропорциональный текущему отклонению фазового угла от заданного значения. Корректирующим устройством В этот сигнал преобразуется в управляющий сигнал, который поступает на вход 3. Одновременно сигнал датчика скорости 9 , связанного с валом двигателя, формирователем 10 преобразуется в последовательность прямоугольных импульсов. Аналогичную функцию выполняет формирователь 11 для генератора эталонной частоты 12 задания скорости. Сигналы формирователей 10 и 11 поступают на блок вычитания частот 13, а с блока 13 и формирователя 11 на вход фазового детектора 14, выходное напряжение которого, пропорционгшьное интегралу отклонения, через корректирующее устройство 15 воздействует на усилитель мощности 2, задавая амплитуду напряжения питания пьезодвигателя. Если скорость вращения близка к заданной, сигнал корректирующего устройства В поддерживает частоту генератора 3 близкой к резонансной, а корректирующее устройство 15 - требуемую амплитуду колебаний, соответствующей моменту нагрузки. При изменении скорости вращения, например, от изменения момента нагрузки, разность фазовых углов напряжения и тока ПР изменяется, в результате чего на выходе устройства сравнения 7 появляется сигнал ошибки, и корректирующее устройство 8 воздействует на генератор 3, изме-. няя частоту питания ПР. Сигнал датчика скорости 9 вызывает появление сигнала ошибки на выходе фазового детектора 14, который поступает на вход корректирующего устройства 15, воздействующего на усилитель мощности 2, изменяя амплитуду напряжения питания пьезодвигателя. Для устойчивой работы соотношение параметров передаточных функций корректирующих устройств 8 и 15 выбрано таким, что во время переходных процессов формируется изменение частоты по сравнению с изменением амплитуды хн&пряжения возбуждения. По окончании переходного процесса устанавливаются новые значения частоты и амплитуды возбуждения пьезорезонатора, соответствующие новому значению момента нагрузки. Стабильность скорости вращения пьезодвигателя в широком диапазоне нагрузки находится на уровне 0,1% для средней скорости и 6,01% для мгновенной скорости. Формула изобретения Устройство управления пьезоэлектрическим двигателем, содержащее датчик скорости, генератор эталонной частоты, два формирователя импульсов, блок вычитания частот, фазовый детектор, корректирующее устройство и усилитель мощности, отличающееся тем, что, с целью повышения точности стабилизации скорости, оно содержит дополнительно управляемый генератор колебаний, датчик тока возбуждения пьезорезонатора двигателя, два формирователя импульсов, фазовый детектор, устройство сравнения с задатчиком и корректирующее устройство, при этом выход датчика тока подключен через первый дополнительный формирователь импульсов к первому входу, а выход усилителя мощности через второй дополнительный формирователь импульсов - ко второму входу дополнительного фазового детектора, выход которого соединен с входом устройства сравнения, выход последнего через дополнительное корректирующее устройство соединен с управляющим входом генератора колебаний, а выход генератора соединен со входом усилителя мощности.
Источники информации, принятые во внимание при экспертизе
1.Бансевичюс Р.Э. и др, О новом виде исполйительного элемента систем приводы в вибродвигателях. Сб. Вибротехника. Научные труды ВУЗов Литовской ССР 3 (16) , с 296-307, 1972.
2.Авторское свидетельство СССР по заявке I 2658082/18-25,
кл. Н 01 L 41/10, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 1991 |
|
RU2025882C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ УЛЬТРАЗВУКОВЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2015 |
|
RU2631332C2 |
| Устройство управления пьезоэлектрическим двигателем | 1978 |
|
SU765911A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПЕРЕМЕЩЕНИЯ С ЦЕПЬЮ УПРАВЛЕНИЯ ДЛЯ КОМПЕНСАЦИИ ПОМЕХ В ПЬЕЗОЭЛЕМЕНТЕ | 2004 |
|
RU2261520C1 |
| Следящая система | 1979 |
|
SU842705A1 |
| Синхронизированный электропривод постоянного тока | 1986 |
|
SU1401547A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2276371C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА ВЕЩЕСТВА | 1999 |
|
RU2165085C2 |
| Импульсный регулятор перемещения пьезодвигателя (варианты) | 1982 |
|
SU1023278A2 |
| Устройство стабилизации частоты вращения вала | 1989 |
|
SU1644219A1 |
