Предлагаемое изобретение относится к транспортным, транспортно-технологическим системам и робототехнике и может быть использовано для транспортировки полезной нагрузки, ее позиционирования, а также для целевого воздействия на опорную поверхность (утаптывание, расчистка, разметка и тому подобное). Предполагается использование изобретения в качестве наземной транспортно-технологической основы сервисных, домашних, сельскохозяйственных, строительных мобильных робототехнических устройств и систем. В качестве основной, базовой, области применения предполагается использование изобретения в условиях жилья человека для бытовых приложений: робот присутствия, робот-сторож, робот-нянька, робот-игрушка и других приложений, где требуется перемещение робота внутри помещения и/или смена его статических поз, позиции (смещений, наклонов, поворотов на месте и т.п.). При этом предполагается, что шагающее устройство оснащается системой энергетического питания, средствами связи. Шагающее устройство может быть дополнено (в зависимости от назначения) различными опциональными устройствами и приспособлениями: датчиками, системой технического зрения, манипуляторами, технологической оснасткой, приспособлениями для переноски, смены аккумулятора и т.п.
Условия человеческого жилья культурно-исторически сформировались для шагающих устройств, потому как человек внутри жилья передвигается шагом. Домашние роботы с колесным приводом широко представлены в рыночных предложениях, но имеют ряд принципиальных ограничений по проходимости, устойчивости, воздействию на пол, безопасности. Даже небольшой порожек в дверном проеме может стать непреодолимым препятствием для колесного робота. Тоже относится и к предметам, оставленным на полу. Шагающий робот имеет возможность не только обходить, но и переступать препятствия. Кроме проходимости, важной характеристикой мобильного робота является устойчивость. Повышение устойчивости традиционных колесных роботов связано с увеличением габаритов и массы, что ухудшает эксплуатационные качества. Ширина проходов, лестниц накладывает ограничения на габариты домашнего мобильного роботы. На массу робота тоже. Для домашнего робота критически важна возможность переноски робота одним человеком. Шагающий робот может менять положения ног, тем самым изменять параметры устойчивости. Кроме того, шагающий робот можно снабдить функцией поддержания устойчивости во избежание падений, заваливаний и опрокидываний в процессе ходьбы. Правильно реагировать на внешние механические воздействия (удары, толчки). К домашним роботам предъявляются особые требования безопасности. Колесные роботы по этой причине потенциально более опасны, т.к. на колесо может намотаться шнур, лента, тряпка и прочие гибкие предметы. Шнур питания, оставленный на полу, будет многократно перекручиваться под ведущим колесом. В общем, колесные роботы требуют адаптации жилья для своего функционирования. Например, роботы-пылесосы с колесным приводом.
Известные шагающие роботы, такие как: Big Dog фирмы Boston Dynamics, StarlETH технической высшей школы Цюриха созданы для целей перемещения в условиях, где нужна повышенная проходимость. Каждая нога у этих роботов имеет три степени свободы и в соответствии им оснащена управляемыми приводами: сгибанием и отведением бедра, а также сгибанием колена. Три степени свободы необходимы, для того чтобы точку опоры той или иной ноги устройства можно было переместить в любую доступную ноге точку пространства с целью обеспечения максимально возможной проходимости. Кроме того, три степени свободы позволяют организовать движение устройства так, чтобы движения ног и движение корпуса устройства были независимы. Это дает возможность менять положение корпуса в пространстве без перестановки ног, а также стабилизировать положение корпуса во время движения.
В патенте CN 102211627 В представлено типичное биоморфное (похожее на биомеханику кошек, собак и других млекопитающих) четырехногое шагающее устройство, где каждая нога снабжена тремя степенями свободы: отведение, сгибание в бедренном суставе и сгибание колена. Для условий жилья человека, где опорной поверхностью является пол, предлагается более простая конструкция, что и является предметом изобретения. Упрощение связано с сокращением степеней свободы ног шагающего устройства с трех до двух с целью сделать устройство более дешевым, более легким, с меньшим потреблением энергии (по сравнению с аналогичной конструкцией шагающего устройства снабженного ногами с тремя степенями свободы).
В качестве аналога, где конструкция ноги содержит две степени свободы, можно выбрать устройство, описанное в «Multifunctional electroelastomer roll actuators and their application for biomimetic walking robots Qibing Pei, Marcus Rosenthal, Ron Pelrine, Scott Stanford, Roy Kornbluh SRI International, 333 Ravenswood Avenue, Menlo Park, California» В этом шестиногом устройстве каждая нога может управляемо изгибаться и удлиняться. Преимуществом такого решение является то, что конструкция ноги совмещена с конструкцией актуатора. К недостаткам этого аналога следует отнести сложность (или невозможность) реализации точных перемещений корпуса в статике (без перестановки ног) в горизонтальной плоскости, а также наличие в актуаторах опасных электрических напряжений (несколько тысяч Вольт). Известны также шагающие устройства, где конструкция ноги снабжена вращательной степенью свободы бедра в горизонтальной плоскости и сгибанием - разгибанием голени. В интернет ресурсе http://dx.doi.org/10.1098/rsif.2012.0669 доступна статья «Owaki D, Kano Т, Nagasawa K, Tero A, Ishiguro А. 2013 Simple robot suggests physical interlimb communication is essential for quadruped walking.» в которой описано четырехногое шагающее устройство с конструкцией ноги, которая обеспечивает вращение бедра в горизонтальной плоскости и сгибание-разгибание голени.
Недостатком шагающих устройств с такой конструкцией ноги является сложность позиционирования и обеспечение точных перемещений корпуса в горизонтальной плоскости. Другим существенным недостатком такой конструкции является то, что для увеличения шага нужно увеличивать ширину и длину устройства, так как бедро ноги у подобных устройств расположено горизонтальной плоскости. В ресурсе https://www.youtube.com/watch?v=ZrPKkDuwXz4_продемонстрирована работа такого устройства.
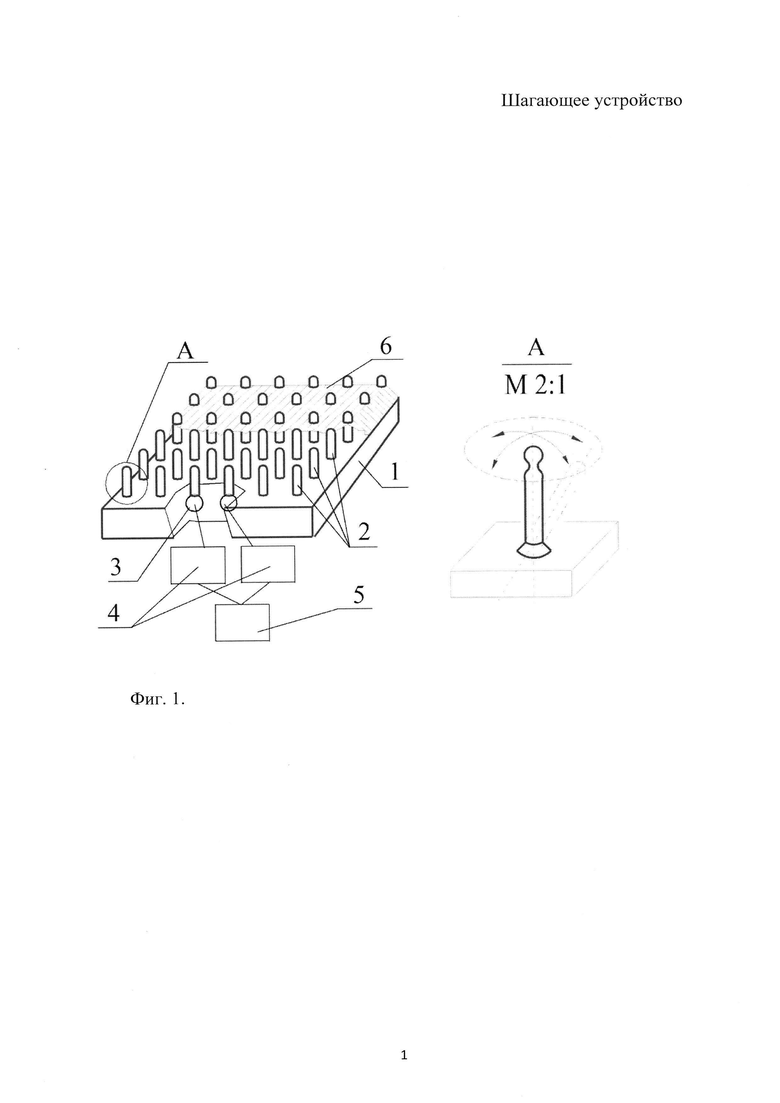
В качестве прототипа выбрано транспортирующее устройство патент РФ 2033955 (фиг. 1.), которое содержит корпус 1 из гибкого упругого материала, стержень 2, шаровые шарниры 3, механизм качания 4, управляемый привод 5, упругое покрытие (пленка) 6.
В корпусе 1 закреплены стержни 2 посредством шаровых шарниров 3. Стержни 2 связаны посредством механизма 4 качания, например, в виде шатунного механизма с управляемым приводом. К стержням 2 прикреплено защитное упругое приспособление в виде пленки 6, герметично соединенное с краями корпуса 1.
Транспортирующее устройство работает следующим образом. Управляемый привод 5 через механизм качания 4 вызывает циклические угловые перемещения стержней 2, обеспечивая при этом желаемый закон этих перемещений: ходьба, бег, ползание.
В процессе работ, направленных на создание домашнего шагающего робота, была создана физическая модель шагающего устройства, с помощью, которой выявились следующие недостатки прототипа:
- при преодолении препятствий типа «ступенька» в фазе заноса ноги на ступеньку нужно сильно отводить ногу в сторону, что ухудшает габаритную проходимость и может вызвать затруднения при переходе из комнаты в комнату через дверной проем и ограничивает возможности маневрирования в ограниченном пространстве;
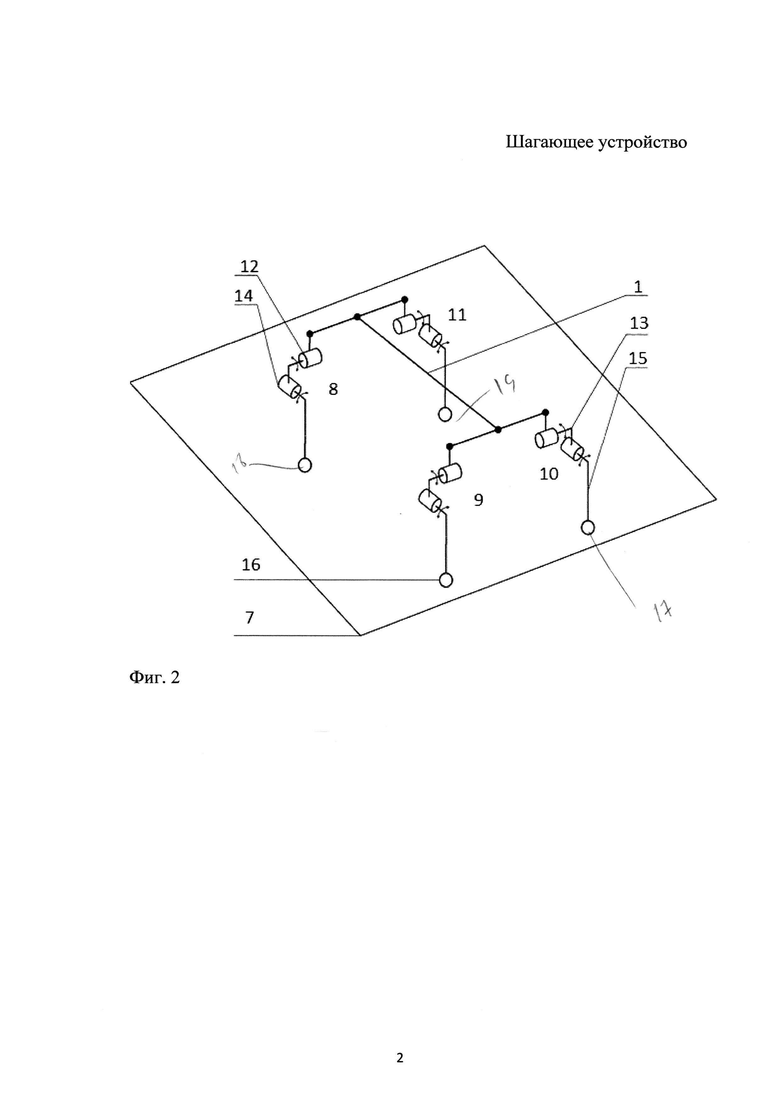
- шаровой шарнир имеет принципиальные конструктивные ограничения величин углов наклона закрепленных в нем стержней, что ограничивает величину шага, усложняет перевод устройства в сложенное состояние, усложняет процедуру самостоятельного вставания устройства на ноги. Авторами в процессе совершенствования прототипа была выработана, математически смоделирована и физически реализована кинематическая конструкция шагающего устройства, изображенная на фиг. 2,
где:
1 - корпус;
7 - опорная поверхность (пол);
8 - нога левая передняя;
9 - нога левая задняя;
10 - нога правая задняя;
11 - нога правая передняя;
12 - привод сгибания-разгибания бедра;
13 - бедро;
14 - привод отведения-приведения голени;
15 - голень;
16 - ступня.
Каждая нога содержит:
- бедро 13, которое соединено через привод сгибания-разгибания бедра 12 с корпусом 1;
- голень 15, которая соединена через привод отведения-приведения голени 14 с бедром 13
- ступню 16, которая соединена с голенью 15 и опирается на пол 7.
Такая кинематическая конструкция функционально отражает морфологию биомеханики позвоночных. С той разницей, что подвижность сустава бедра ограничена функцией сгибания-разгибания, а коленный сустав развернут относительно оси бедра и выполняет функцию отведения - приведения голени. При этом ступня ноги жестко связана с голенью или снабжена пассивными (без оснащения приводом) степенями подвижности.
Принцип действия:
В работе устройства можно выделить два основных рабочих режима:
- режим позиционирования.
В режиме позиционирования изменяется положение корпуса, ориентация корпуса в пространстве, а не его перемещение;
- режим движения.
В режиме движения устройство перемещается по опорной поверхности (полу) по запланированной (рассчитанной заранее) траектории и с выбранной заранее походкой (способу движения, аллюру, стилю ходьбы).
В процессе работы устройства в зависимости от положения корпуса 1 и положения ноги 8, 9, 10, 11 можно выделить на опорной поверхности (пола) 7 характерные точки и зоны, которые показаны на фиг. 3,
где:
17 - зона переноса ноги;
18 - зона опоры ноги;
19 - точка касания ноги;
20, 21, 22 - точки опоры ноги;
23 - точка отрыва ноги;
24, 25, 26, 27, 28, 29, 30 - точки переноса ноги.
Стрелкой на фиг 3. указано направление движения корпуса. Точки пронумерованы в соответствии с циклической последовательностью изменения положения ноги, характерной при ходьбе. В соответствии с кинематической конструкцией ноги 8, 9, 10, 11 зона опоры ноги 18 имеет кинематическую конструкцию ноги 8, 9, 10, 11, зона опоры ноги 18 имеет эллиптическую форму, вытянутую в направлении перед-зад устройства. Вытянутая эллиптическая форма зоны опоры ноги 18 является отличительным признаком от прототипа, в котором зона опоры ноги имеет форму окружности. Вытянутая форма зоны опоры ноги 18 имеет следующее преимущество перед прототипом:
- улучшает габаритную проходимость, так как нужно отводить ногу (опору) на меньший угол при той же величине шага.
Принцип работы устройства аналогичен принципу работы известных шагающих устройств, который заключается в согласованной циклической последовательности движений ног, так чтобы устройство опиралось на одни, в то время как другие ноги переносились на новое место опоры.
Устройство функционирует следующим образом.
Устройство может менять статическое положение. При этом ноги устройства находятся в зоне опоры ноги 18 (фиг 3).
На фиг 4 покадрово изображены различные статические положения,
где кадр:
31 - нейтральное положение, ноги находятся в вертикальном положении;
32 - смещение на месте влево;
33 - смещение на месте вправо;
34 - смещение на месте вперед;
35. - смещение на месте назад;
36 - полуоборот на месте влево;
37 - полуоборот на месте вправо.
При перемещении устройство опирается на одни, в то время как другие ноги переносятся на новое место опоры. Для походки типа «Рысь» характерна диагональная смена опорных ног. На фиг 5 покадрово показаны фазы движения устройства типа «Рысь»,
где кадр:
38 - правая передняя 11 и левая задняя 9 ноги находятся в точках касания 19, а левая передняя 8 и правая задняя 10 ноги в точках отрыва 23;
39 - правая передняя 11 и левая задняя ноги 9 находятся в точках опоры 20, 21, 22, а левая передняя 8 и правая задняя 10 ноги в точках переноса 24, 25, 26, 27, 28, 29, 30;
40 - правая передняя 11 и левая задняя 9 ноги находятся в точках отрыва 23, а левая передняя 8 и правая задняя 10 ноги в точках касания 19;
41 - правая передняя 11 и левая задняя 9 ноги находятся в точках переноса 24, 25, 26, 27, 28, 29, 30, а левая передняя 8 и правая задняя 10 ноги в точках опоры 20, 21, 22.
42 - правая передняя 11 и левая задняя 9 ноги находятся в точках касания 19, а левая передняя 8 и правая задняя 10 ноги в точках отрыва 23. Аналогично кадру 38.
ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ
Технический результат соответствует заявленным целям изобретения - упрощение кинематической конструкции шагающих устройств, предназначенных для перемещений преимущественно по полу с возможностью переступания или обхода препятствий, смена статических положений корпуса в горизонтальной плоскости, а также с возможностью движения по ступенькам лестницы. Указанный результат достигается тем, что бедренный сустав у ног оснащен управляемым приводом сгибания-разгибания бедра 12, а коленный сустав - приводом отведения-приведения голени 14. Такое упрощение кинематической конструкции дает взаимосвязанный мультипликативный положительный эффект:
- уменьшение количества приводов влечет за собой уменьшение массы, уменьшение общей стоимости устройства на величину стоимости приводов, упрощает конструкцию ноги;
- уменьшение массы устройства влечет за собой уменьшение необходимой мощности приводов и, как следствие, уменьшение их массы и стоимости;
- упрощение конструкции ноги делает ее более дешевой в изготовлении, уменьшает массу устройства и влечет за собой уменьшение необходимой мощности приводов и, как следствие, уменьшение их массы и стоимости, а кроме того, уменьшает момент инерции подвижных частей, что уменьшает энергозатраты и, как следствие, - уменьшение необходимой массы и стоимости аккумуляторов и т.д.
В конечном счете, способствует экономической целесообразности применения заявляемого устройства для широчайшего спектра общественно полезных прикладных задач. И может быть важным фактором, важной составной частью, технической основой для создания в России конкурентоспособной индустрии роботов.
СВЕДЕНИЯ, ПОДТВЕРЖДАЮЩИЕ ВОЗМОЖНОСТЬ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Устройство (четырехногий вариант) было реализовано в виде математической модели в среде «Matlab» с визуализацией с помощью средств «SimMechanics».
На фиг 4 покадрово изображены различные статические положения модели устройства.
На фиг 5 покадрово изображены фазы походки «Рысь».
Устройство (аналогичное его модели) было реализовано в виде действующего экспериментального макета, который изображен на фиг 6. В качестве приводов используются 8 сервоприводов фирмы Tower PRO SG-5010 с усилием 6.5 кг на см с напряжением питания 6 В. Управление движением было реализовано на базе микроконтроллера серии STM32. Простейший вариант программы управления представляет собой циклограмму, которая реализует походку типа «Рысь».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением четырехногого шагающего робота по пересеченной местности | 2023 |
|
RU2832498C1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2033955C1 |
| РОБОТИЗИРОВАННОЕ УСТРОЙСТВО | 2022 |
|
RU2788754C1 |
| ВЗРЫВОЗАЩИЩЕННЫЙ ШАГАЮЩИЙ РОБОТ | 2023 |
|
RU2832153C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ И ПОСЛЕДСТВИЙ ПОВРЕЖДЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2098149C1 |
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМ ДВИЖИТЕЛЕМ | 2018 |
|
RU2684956C1 |
| БИОНИЧЕСКИЙ ШАГАЮЩИЙ АППАРАТ | 2005 |
|
RU2293014C1 |
| КОЛЁСНО-ШАГАЮЩИЙ РОБОТ ДЛЯ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ | 2024 |
|
RU2839028C1 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2296668C2 |


Изобретение относится к транспортным, транспортно-технологическим системам и робототехнике. Шагающее устройство содержит корпус, к которому присоединены стержни, механизм качания и управляемый привод. Стержни выполнены в виде ног и представляют из себя механически связанные верхний рычаг, нижний рычаг и опору. Верхний рычаг снабжен управляемым приводом с функцией вращательного движения верхнего рычага в оси, параллельной оси тангажа корпуса, и связывает верхний рычаг с корпусом. Другой конец верхнего рычага связан с нижним рычагом посредством управляемого привода с функцией вращательного движения нижнего рычага в оси, параллельной оси крена корпуса, ортогонально оси вращательного движения верхнего рычага. Другой конец нижнего рычага связан с опорой. Функцию механизма качания обеспечивает конструкция ноги. Достигается упрощение кинематической конструкции шагающих устройств, предназначенных для перемещения по полу с возможностью переступания или обхода препятствий, смены статических положений корпуса в горизонтальной плоскости и с возможностью движения по ступенькам лестницы. 6 ил.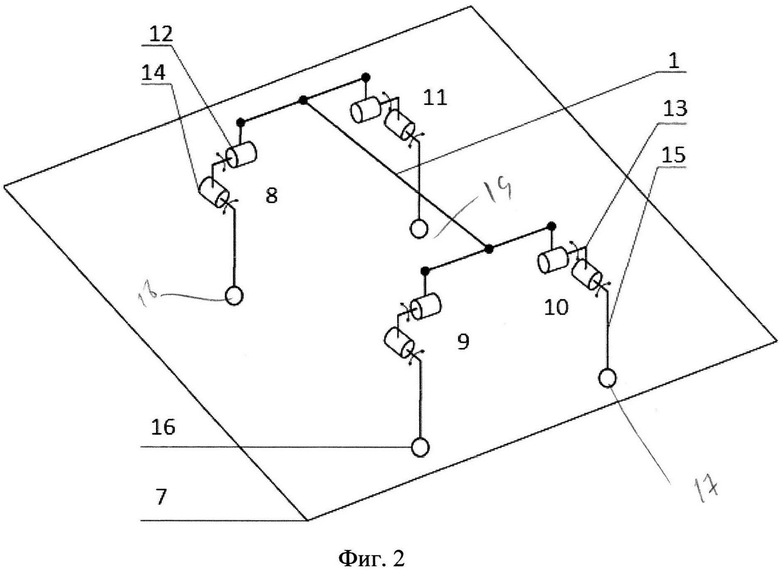
Шагающее устройство, содержащее корпус, к которому присоединены стержни, механизм качания и управляемый привод, отличающееся тем, что стержни выполнены в виде ног, представляющих из себя механически связанные верхний рычаг, нижний рычаг и опору, при этом верхний рычаг снабжен управляемым приводом с функцией вращательного движения верхнего рычага в оси, параллельной оси тангажа корпуса, и связывает верхний рычаг с корпусом, а другой конец верхнего рычага связан с нижним рычагом посредством управляемого привода с функцией вращательного движения нижнего рычага в оси, параллельной оси крена корпуса, ортогонально оси вращательного движения верхнего рычага, другой конец нижнего рычага связан с опорой, при этом функцию механизма качания обеспечивает конструкция ноги.
| СN 102211627 A, 12.10.2011 | |||
| JP 2001239478 A, 04.09.2001 | |||
| US 5404086 A, 04.04.1995 | |||
| US 4202423 А,13.05.1980. |

