Изобретение относится к технике подъемных установок, в частности к системам тиристорного управления электропривода постоянного тока установок типа шахтных подъемников, и может быть использовано для формирования изменяющегося во времени напряжения, величина которого отображает требуемый закон изменения скорости подъемного сосуда.
Цель изобретения - повышение точности задания скорости движения шахтной подъемной установки.
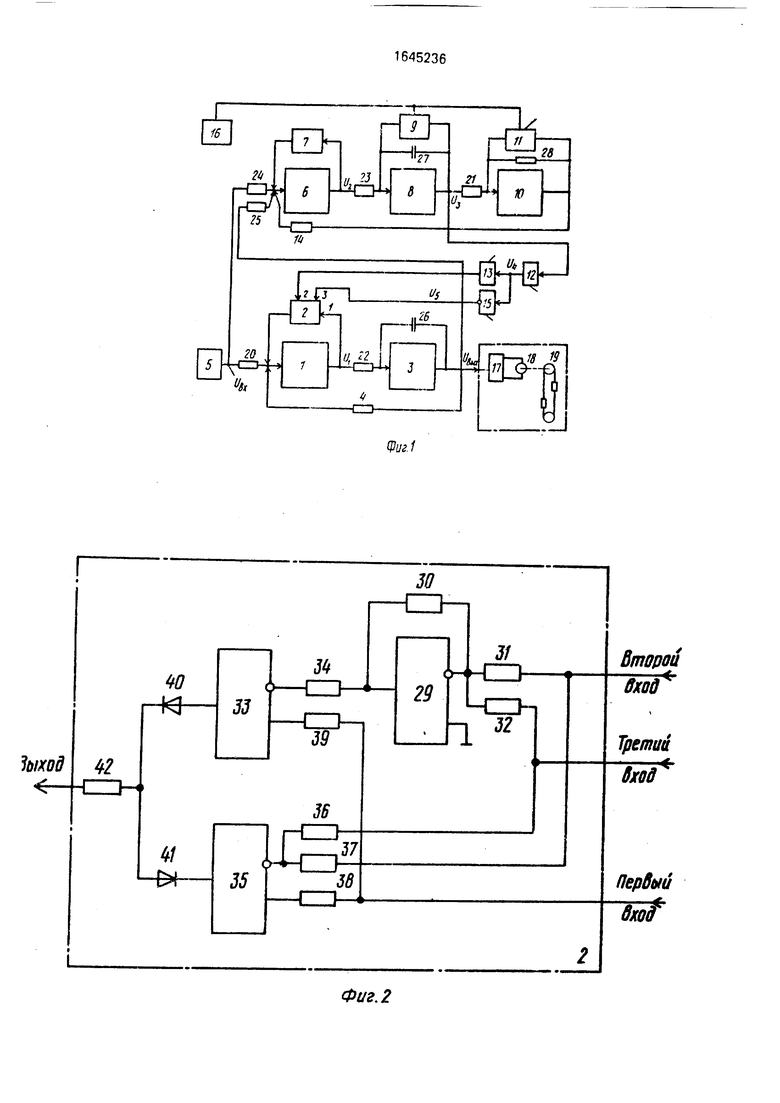
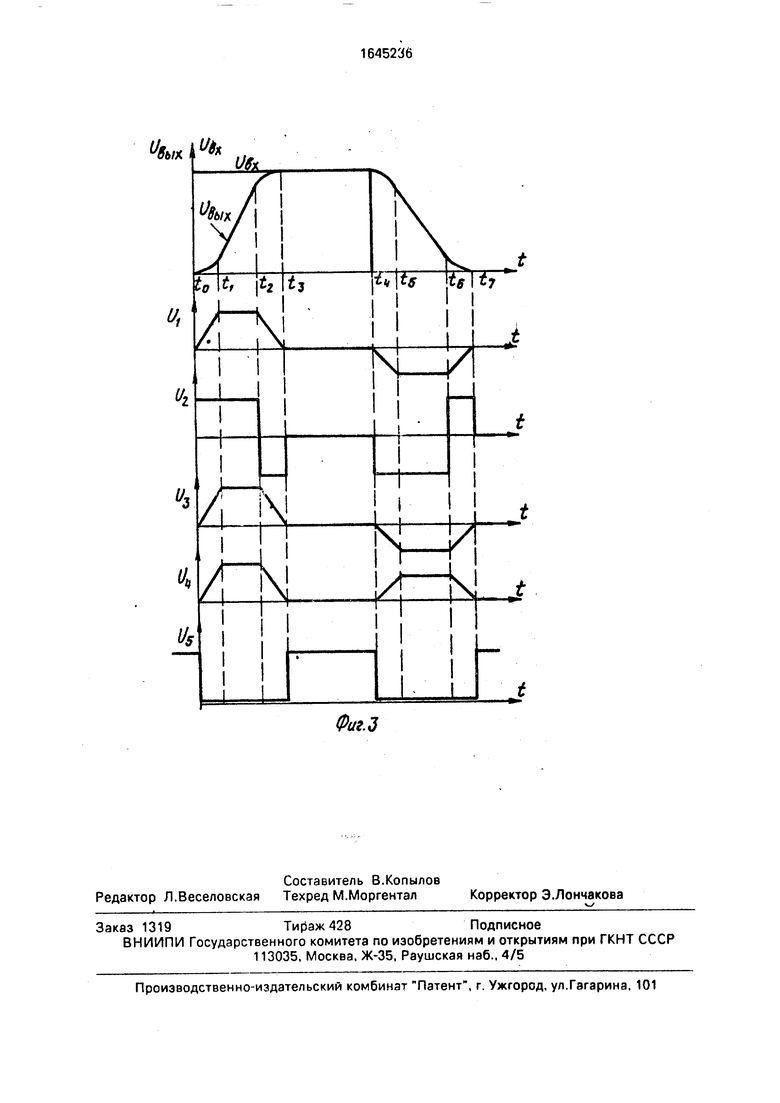
На фиг. 1 представлена общая схема устройства; на фиг. 2 - принципиальная схема первого ограничителя; на фиг. 3 - графики изменения во времени формируемых в устройстве сигналов управления: DBX - входной; Квых - выходной; Ui - на выходе первого линейного усилителя; Uz - на выходе второго линейного усилителя; Кз на выходе второго интегрирующего усилителя; LU - на выходе элемента выделения модуля; Us - на выходе нуль-органа; tot фиксированные моменты времени.
Устройство для задания режима движения шахтной подъемной установки содержит соединенные последовательно первый линейный усилитель 1 с первым ограничителем 2 в цепи обратной связи и первый интегрирующий усилитель 3, выход которого
о
Ьь
СП
ю
CJ
СЬ
го
через первый резистор 4 обратной связи подключен к входу первого линейного усилителя 1 и является выходом устройства Входное напряжение, пропорциональное заданной скорости движения шахтной подъемной установки, подается с задатчика 5 скорости на вход первого линейного усилителя 1, являющийся входом устройства. Опорное напряжение на второй вход первого ограничителя 2 поступает со схемы регулируемого напряжения ограничителя содержащей соединенные последовят ль- но второй линейный усилитель Ь с третьим ограничителем 7 в цепи обратной связи, второй интегрирующий усилитель 8с вторым ограничителем 9 в цепи обратной связи и третий линейный усилитель 10 с блоком 11 изменении коаффициента усиления в цепи обратной связи, а также последовательно соединенные элемент 12 выделения модуля и блок 13 гальванической развязки, выход которого связан с вторым входом первого ограничителя 2, при этом выход второго интегрирующего оп«.ра ционного усилителя 8 соединен с в/идом элемента 12 выделения модуля, а в-. ход третьего линейного операционного vi пли 1 я 10 cor-динен черо- мсй .- г м 1 ч обратной связи с вхо,м вюрого линейного усилителя 6, которым г t цзан также с выхо- дами задатчика 5 скорости и первого интегрирующего операционного усилитепя 3, а выход элемента 12 вь т,е ия модул через нуль-орган 15 гюдкп: и к 1реть-„му входу первого ограничителе 2. Сигнал н: ппме- нение ускорения поступает с сыходз задатчика 16 ускорения на управляющие влоды второго ограничителя 9 и блока 11 изменения коэффициента усиления. Выход устройства соединен с входом системы 17 автоматического регулирования электроприводом, которая управляет подъемным электродвигателем 18. Электродвигатель 18 приводит в движение бярабан 19 шахтой подъемной установки. На выходе первого 1 и третьего 10 линейных, первого 3 и второго 8 интегрирующих усилите/; I- включены пе- зисторы 20, 21, 22 и 23 соответственно, а на входе второго линейного усилится к гклю- чены резисторы 24 и 25 В отрицатель- ной обратной связи пер нот 3 и итог по 8 интегрирующих усилителей включены конденсаторы 26 и 27. В цепи отрицательной обратной связи третьего линейного усилителя 10 включен резистор 28. Исгочник 1 пи- тания усилителей на с,м-з ке .
Первый ограничите/.ь 2 может реализован с использованием компараторов и усилителей в соответствии со , зо- бражеиной на фиг. 1 ,л , верт| г
щий усилитель 29 имеет в обратной связи резистор 30, а на его входе включены резисторы 31 и 32. Первый компаратор 33 инвертирующим ах одом подключен через резистор 34 к выходу инвертирующего усилится 29, а второй компаратор 35 своим инвертирующим входом подключен через резистор 36 к регистру 32 и третьему входу перво о ограничителя 2, а через рези- сюр 37 - к резистору 31 и второго входу первого ограничителя 2, а его неинвертиру- к, Чий вход подключен чэрез резистор 38 к первому входу перво о ограничителя 2, куда также подключен неинвергирующий сход первого компаратора 33 через резистор 39. Выходы первого 33 и вюрого 35 компараторов чг-рез первый 40 и второй 41 диоды соединепь1 мехду собой и через ре- 4 подключены к выходу первого ограничителя 2
Устройство работает следующим обрэ- ом
В ио. дном состоянии (режим стоянки
, хтнс 1 подъемной установки) на выходе
1-1 г- ,- 1 ) скорости имеется нулевой сиг ; ,: ui- v имеется также нулевой сигнал на выхруПРч второго линейного 6 и второго
iMT ipnpyi i; гг- 8 уси мтелей, а также на зькоде эле ° «та 12 выделения модуля, при этом из выходе нуль-органа 15 и,eeтcя максимальный сии.ал, а на выходе блока 13 юльванической развязки - нулевой сигнал, , о первый огоаничитель 2 будет иметь в : Ю1 режиме максимальное опорное нэпря- хение, п j, гом/ в случае возникновения не- кстг оого рассогласования между заданным нулевым cm на том на выходе задагчика 5 скорости и выходным напряжением уст- ро ст-за оно ликвидируется с максимальной интенсивностью. Таким образом обеспечивается точное поддержание нулевого уровня выходного напряжения устройства.
С подачей сигнала на чход устройства (Uох) с выхода зэдатчика 5 скорости в момент времени to на входе и выходе второго линейного усилителя 6 появляется напряже- «.ие. причем его величина ((ограничивается третьим ограничителем 7 и определяет тег/п линейного изменения напряжения на выходе второго интегрирующего усилитепя
Это линейно нараглающге напряжение СУз) преобразуется элементом 12 выделения модуля в сигнал определенной полярности и подается через блок 13 гальванической развязки в качестве опорного на второй вход горл О о ограничителя 2. На выходе же нуль-органа 15 напряжение становится нулевым, так как на его входе, т.е. на выходе 1 т мент а 12 выделения модуля, имеется не- .сй гндл Мл 1г.- нчпичии л неГно
нарастающего напряжения ограничения 1М напряжение на выходе первого линейного усилителя 1 тоже нарастает: Ui У - -U2 t/Ti;t0 , где Ti Раз С27,15
Ti - постоянная времени интегрирования второго 8 интегрирующего усилителя;
R23 - омическое сопротивление резистора 23;
С27 - емкость конденсатора 27.10
величина постоянной времени TI соответствует выбранному значению рывка в механизме.
При этом выходное напряжение устройства изменяется по закону15
U
вых
Ur t/Тз, to t tl,
t/Ti, Ki U2/Ti,
t2/T2l
(1),
где Ki - коэффициент пропорциональности, определяющий рывок в механизме;
Т2 R22 С2б;
Т2 - постоянная времени интегрирования первого 3 интегрирующего операционного усилителя;
R22 - омическое сопротивление рези- стора 22;
С26 - емкость конденсатора 26.
Таким образом, в течение времени to t ti выходное напряжение ивых устройства изменяется по квадратичному за- кону. Сформированный закон изменения напряжения соответствует участку ограничения рывка в механизме.
При t S ti сигнал управления Кз становится постоянным и равным напряжению ограничения второго ограничителя 9, величина которого определяется допустимым ускорением привода при разгоне и выбирается по команде задатчика 16 ускорения в зависимости от режима движения. При по- стоянстве этого сигнала сигнал управления Ui на выходе первого линейного усилителя 1 тоже постоянный, поэтому выходное напряжение устройства (Увых) растет по линейному закону
Unbix Ur t/T2, t1 t t2.
Таким образом, чэ участке ti r 12 выходное напряжение устройства нарастает по линейному закону с ограничением ускорения. В момент t 12 выходное напряжение второго линейного усилителя 6 уменьшается до нуля за счет присутствия на его входе разности входного и выходного сигналов устройства, а также сигнала отри5
0
5
0
5
0
5
0 5 0
5
цательной обратной связи с выхода третье- г-j линейного усилителя 10. В этот момент времени алгебраическая сумма входных сигналов становится разной нулю;
ивх-ивых-из-К2 0 (2)
где «2 - коэффициент усиления третьего линейного усилителя 10, который определяется отношением суммы сопротивления резистора 28 и резисторов, содержащихся в блоке 11 изменения коэффициента усиления, к величине сопротивления резистора 21.
В следующий момент времени алгебраическая сумма входных сигналов становится отрицательной:
Увх-Увых-из- . Под действием суммарного сигнала напряжение на выходе второго линейного ус пителя б меняет знак (У2) и достигает максимума, задаваемого третьим ограничителем 7. Время описанного переключения очень мало и определяется большим собственным коэффициентом усиления второго линейного усилителя 6. Для работы устройства необходимо выполнение условий:
R20 И R25 R24,
где R20. R4, R25, R24 - омические сопротивления резисторов 20, 4, 25 и 24 соответственно.
Изменение знака напряжения U2 приводит к разряду конденсатора 27 по линейному закону (Из), что вызывает уменьшение по этому же закону управляющего сигнала U4. Следовательно, будет уменьшаться по линейному закону и напряжение Ui на выходе первого линейного усилителя 1. Поэтому выходное напряжение (Увых) устройства изменяется по квадратичному закону, аналогично изменению напряжения на участке т0 t ti.
Сформированный закон изменения выходного напряжения соответствует участку ограничения рывка в механизме.
При t т.3 выходное напряжение устройства становится равным входному напряжению, поэтому на входе и выходе первого линейного усилителя 1 напряжение равно нулю (за счет действия отрицательной обратной связи через резистор 4), следовательно, на выходе устройства напряжение (Увых) будет постоянным до момента начала замедления шахтной подъемной установки (t ти).
При t гз алгебраическая сумма сигналов на входе второго линейного операционного усилителя 6 становится равной нулю:
и„х-иВых-из- К2 0, так как UBX Увых и 1)3 0.
Следовательно, равно нулю напряжение на выходах второго линейного 6 и второго интегрирующего 8 усилителей, поэтому на выходе элемента 12 выделения модуля присутствует нулевой сигнал, такой же сигнал присутствует и на втором входе первого ограничителя 2, а на выходе нуль- органа 15 появляется максимальный сигнал (Us), при этом обеспечивается максимальное опорное напряжение на первом ограничителе 2. я что обеспечивает максимальное отклонение выходного напряжения Ui первого линейного усилителя 1 при сколь угодном малом расхождении заданного сигнала скорости с выходным напряжением устройства. Таким образом, это расхождение ликвидируется с максимальной интенсивностью, а следовательно, в этом режиме достигается высокая точность поддержания выходного напряжения (Увых) в соответствии с заданным входным напряжением (Уох).
Замедление начинается в момент исчезновения сигнала на выходе задатчика 5 скорости. Процесс замедления протекает аналогично описанному процессу пуска, т.е. работа устройства на участках м - ts, ts te, te -1 аналогична работе на участках to - ti, ti - tz, t2 - to соответственно, при этом обеспечивается ограничение рывка в механизме в интервалах времени t4 - ts и t6 - t и замедление с постоянным ускорением в интервале времени ts - te (фиг. 3).
Ядмрппрнме происходит с меньшим, чем при разгоне, ускорением, поэтому для согласованной работы задающего устройства необходимо изменить коэффициент усиления Ка третьего линейного усилителя 10 пропорционально изменению напряжения ограничения второго интегрирующего усилителя 8.
Значение коэффициента усиления К2 определяется следующим образом.
Приращения выходного напряжения устройства Л Увых на интервалах времени to;
ti и t2; ta одинаковы и определяются выражением (1):
AUBb,x U2 t12/OVT2)
-fTl/T2 U3orp2/U2),(3)
rfleti Ti Узогр/Уг:
Уз orp - максимальное напряжение вто- рого интегрирующего усилителя 8, задаваемое вторым ограничителем 9.
Из уравнения (2) следует, что в момент времени t t2
АУвых К2 Уз огр.
Отсюда
К2 ) (U3orP/U2) (4)
Изменение «2 осуществляется по команде эадатчика 16 ускорения шунтированием части резисторов, входящих в состав блока 11 изменения коэффициента усиления.
В предлагаемом устройстве накапливания ошибки интегратором не происходит, так как на первом ограничителе во всех режимах работы устройства присутствует опорное напряжение, поэтому даже некоторое расхождение между сигналом задания (Увх) и выходным сигналом устройства (Квых) способствует появлению напряжения Ui на выходе первого линейного усилителя, которое, будучи приложенным к входу интегрирующего усилителя 3, приводит к восстановлению соответствия между сигналами Увых и UBX.
Фоомула изобретения Устройство задания режима движения шахтной подъемной установки по авт. Св.
№1406110, отличающееся тем,что, с целью повышения точности задания скорости движения шахтной подъемной установки, оно дополнительно содержит нуль-орган, к входу которого подключен
выход элемента выделения модуля, а выход соединен с третьим входом первого ограничителя.
U$
tf
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство задания режима движения шахтной подъемной установки | 1986 |
|
SU1406110A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1984 |
|
SU1230956A1 |
| Устройство формирования программы работы электропривода шахтной подъемной установки | 1987 |
|
SU1578077A1 |
| Релейная система управления | 1988 |
|
SU1695261A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1986 |
|
SU1444265A2 |
| Задающее устройство системы управления электроприводом | 1986 |
|
SU1381674A1 |
| Задающее устройство системы управления электроприводом | 1980 |
|
SU917290A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
Изобретение относится к управлению электроприводом постоянного тока шахтных подъемных установок и предназначено для формирования изменяющегося во времени напряжения, величина которого отображает требуемый закон изменений скорости подъемного сосуда. Изобретение позволяет повысить точность задания скорости движения шахтной подъемной установки. Устройство содержит последовательно соединенные скорости 5, линейные усилители (/ У) 1, К с ограничителями 2, 7 в цепи обратной связи (ОС), интегрирующий усилитель (ИУ) 3.второй ИУ 8 с ограничителем 9 в цепи ОС и третий ЛУ 10 с блоком 11 изменения коэффициента усиления в цепи ОС усилителей. Выход ЛУ 10 соединен с входом ЛУ G, Выход ИУ 8 через последовательно соединенные элементы 12 выделения модуля и блок 13 гальванической развязки соединен с вторым входом ограничителя 2, третий вход которого через дополнительно введенный нуль-орган 15 соединен с выходом элемента 12. Вход ЛУ 6 соединен с выходами задатчика 5 и ИУ з, который соединен через резистор 4 с входом Л У 1. Введение нуль-органа 15 с соответствующими связями позволяет избежать накопления ошибки интегрирования, поскольку при нулевом опорном напряжении ограничителя 2 его работа приводит к блокировке ЛУ 1.3 ил. (/V
faxod
Фиг. 2
I/I
| Устройство задания режима движения шахтной подъемной установки | 1986 |
|
SU1406110A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
