Изобретение относится к промышленному транспорту, а именно к приводным устройствам роликовых конвейеров с бесконечными ведущими элементами, и может быть использовано в любой отрасли промышленности, в частности в системах конвейеров для перемещения обрабатываемых фотоматериалов через ванны с обрабатывающими растворами.
Известен рольганг, содержащий ряд валов с установленными на них транспортирующими роликами и с размещенными по одному на всех валах ведущими колесами, закрепленными жестко, и ведомыми колесами, установленными свободно [1]. Все колеса расположены в шахматном порядке в двух параллельных рядах и кинематически связаны в ряду между собой посредством бесконечного гибкого тягового элемента, направления охвата которым ведущих и ведомых колес диаметрально противоположны, а направления охвата одноименных колес гибкими элементами пары рядов идентичны. Ряды колес расположены по обоим концам валов.
Соответствие каждому ведущему колесу ролика соосного с ним ведомого колеса позволяет выполнить каждый ролик приводным, а использование одного приводного двигателя позволяет обеспечить идентичность линейных скоростей вращения роликов без дополнительных конструктивных усложнений.
Однако мощность по длине этого рольганга распределена неравномерно. Уменьшение мощности в каждом ряду происходит в одном направлении, от первого ролика к последнему. Поэтому необходимо повышать мощность приводного двигателя, особенно при большой длине рольганга. Кроме того, из-за имеющего место предварительного натяжения бесконечного гибкого тягового элемента со стороны привода, тем большего, чем длиннее рольганг и чем меньше расстояние между колесами роликов, колеса и подшипники валов роликов воспринимают значительную дополнительную радиальную нагрузку, которая многократно превосходит воздействие на ролики транспортируемых грузов. При этом воздействие гибких элементов на колеса одного ролика диаметрально противоположны, что при максимально разнесенных друг от друга колесах ролика приводит к значительному моменту пары сил, действующих на каждый ролик. Это снижает надежность в работе и уменьшает срок службы рольганга.
Наиболее близким по технической сущности к изобретению является рольганг, содержащий ряд валов с установленными на них транспортирующими роликами, два ряда установленных на валах колес, ведущие из которых жестко закреплены на каждом валу, а ведомые свободно установлены на внутренних в ряду валах и расположены поочередно с ведущими колесами, и привод, кинематически связанный с одним из валов [2]. Ведущие и ведомые колеса в каждом ряду охвачены поочередно с противоположных сторон гибким тяговым элементом, а в двух рядах одноименные колеса охвачены гибким тяговым элементом с одинаковых сторон и расположены в шахматном порядке. Ряды колес расположены с одной стороны ряда роликов близко друг от друга.
Расположение двух рядов колес роликов в непосредственной близости друг от друга позволяет резко снизить момент пары сил, действующих на вал каждого ролика со стороны гибких тяговых элементов и снижающих надежность устройства. Однако мощность по длине этого рольганга распределена неравномерно. Уменьшение ее в каждом ряду происходит в одном направлении, от первого ролика к последнему, что требует повышения мощности приводного двигателя. Кроме того, не являющиеся диаметрально противоположными направления охвата гибкими элементами колес вала, связанного с приводом, приводят к значительной суммарной радиальной нагрузке на этот вал со стороны гибких элементов. Также нескомпенсированной является аналогичная нагрузка на соседний с валом, связанным с приводом, вал и предпоследний вал рольганга, направления охвата колес которых гибкими тяговыми элементами не противоположны диаметрально. И совсем ничем не скомпенсирована аналогичная нагрузка на единственное колесо последнего вала рольганга.
Причинами существования отмеченных выше недостатков устройства-прототипа являются подведение мощности к рольгангу в каждом его ряду колес лишь с одной стороны: со стороны первого его вала, и несимметричность направлений охвата гибкими тяговыми элементами колес двух крайних пар валов.
Требуемый технический результат, на достижение которого направлено настоящее изобретение, усматривается в равномерном распределении мощности по длине рольганга и уменьшении нагрузки на валы роликов, а следовательно, в улучшении транспортирования грузов и повышении надежности в работе и срока службы рольганга.
Указанный технический результат достигается тем, что рольганг, содержащий ряд валов с установленными на них транспортирующими роликами, два основных ряда установленных на валах колес, ведущие из которых жестко закреплены на каждом валу, а ведомые свободно установлены на внутренних в ряду валах и расположены поочередно с ведущими колесами, и привод, кинематически связанный с одним из валов, при этом ведущие и ведомые колеса в каждом основном ряду охвачены поочередно с противоположных сторон гибким тяговым элементом, а в двух основных рядах одноименные колеса охвачены гибкими тяговыми элементами с одинаковых сторон и расположены в шахматном порядке, снабжен двумя дополнительными рядами колес, установленных на валах и охваченных гибкими тяговыми элементами. Привод кинематически связан с другим валом. Оба связанных с приводом вала кинематически связаны между собой. Одноименные колеса основных и дополнительных рядов охвачены гибкими тяговыми элементами с диаметрально противоположных сторон.
Углы охвата колес гибким тяговым элементом равны между собой.
Кинематическая связь двух связанных с приводом валов выполнена в виде двух установленных на последних одинаковых зубчатых колес и расположенной между ними в зацеплении шестерни, установленной на валу привода.
Благодаря второй паре рядов колес и гибким тяговым элементам, их связывающих, а также благодаря диаметрально противоположным направлениям охвата одноименных колес отдельного вала и идентичности углов охвата гибкими тяговыми элементами всех колес уравновешиваются радиальные нагрузки противоположного направления на валы роликов со стороны гибких тяговых элементов, что превращает опоры валов практически в "плавающие". Благодаря другому валу, связанному с приводом идентично первому с ним связанному валу, и благодаря диаметрально противоположным направлениям охвата ведущих колес каждого из этих валов к валу каждого ролика подводится мощность с двух противоположных сторон, т.е. на каждый вал действуют два идентичных крутящих момента, уменьшенных соответственно на величины, пропорциональные количеству роликов рольганга, расположенных по разные стороны от данного вала, что обеспечивает постоянство величины суммарного момента на валу ролика.
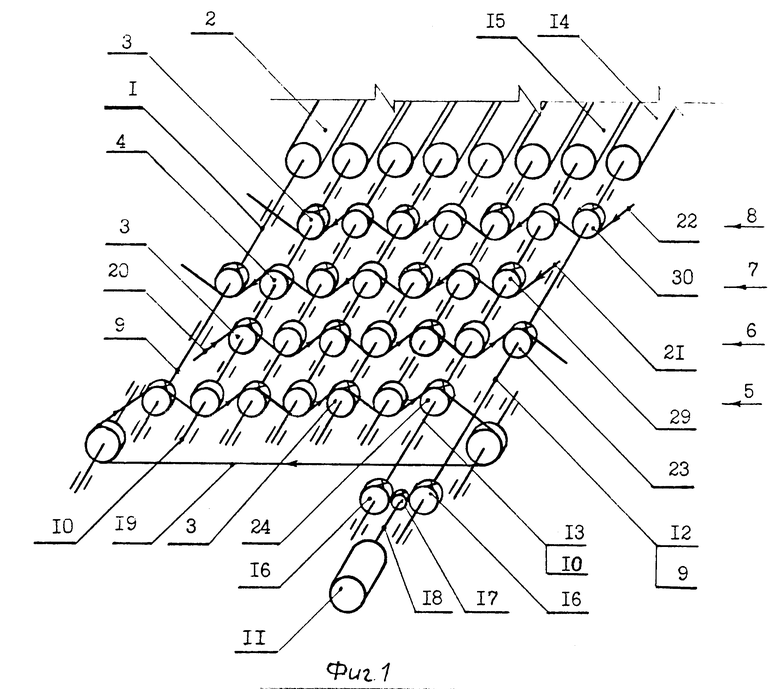
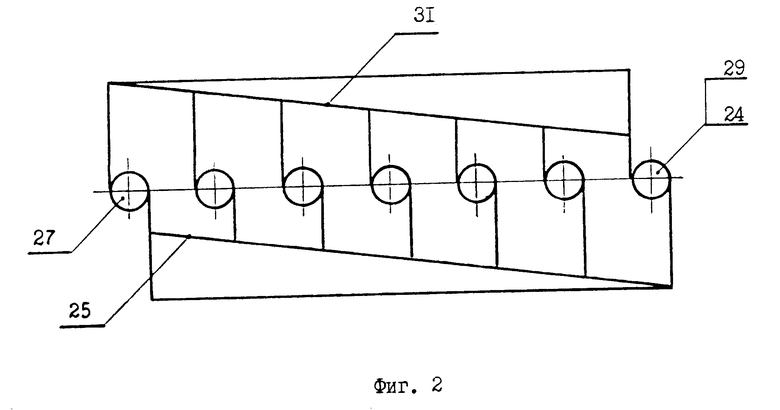
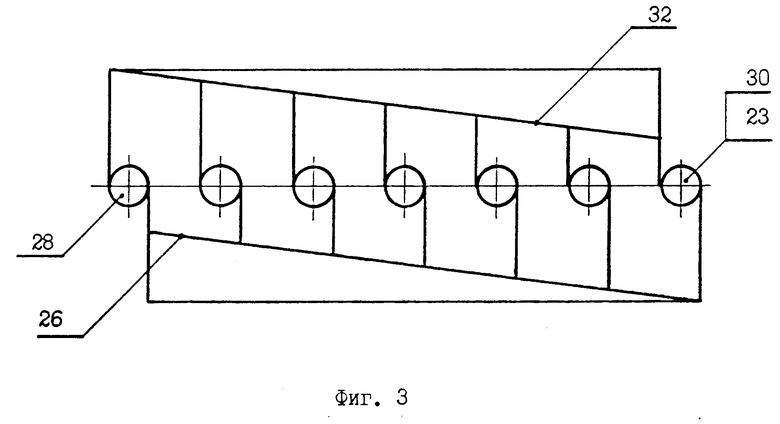
На фиг.1 схематически изображен рольганг с кинематической схемой привода его роликов; на фиг.2 - эпюра крутящих моментов на валах роликов, кинематически связанных гибкими элементами с первым ведущим валом рольганга; на фиг. 3 - то же, на валах роликов, связанных с вторым ведущим валом рольганга.
Рольганг содержит ряд валов 1 (фиг.1), свободно вращающихся в подшипниках (на фиг. не показаны), с установленными на них идентичными транспортирующими цилиндрическими роликами 2 и колесами (зубчатыми или фрикционными) 3, 4, размещенными в двух основных рядах 5, 6 и в двух дополнительных рядах 7, 8. Колеса 3 выполнены ведущими, жестко закрепленными на каждом (внешнем 9 и внутреннем 10 в рядах 5-8) валу. Колеса 4 выполнены ведомыми, свободно установленными на внутренних в рядах 5-8 валах 10. В каждом ряду 5-8 ведомые колеса 4 расположены поочередно с ведущими колесами 3. В основных 5, 6 и дополнительных 7, 8 рядах ведущие 3 и ведомые 4 колеса расположены в шахматном порядке. Привод 11 рольганга кинематически связан с валами 12, 13 первых двух роликов 14, 15.
Оба связанных с приводом 11 вала 12, 13 кинематически связаны между собой. Эта кинематическая связь может быть реализована различно. В одном из вариантов выполнения устройства кинематическая связь валов 12, 13 выполнена в виде двух установленных на валах 12, 13 одинаковых зубчатых колес 16 и расположенной между ними в зацеплении шестерни 17, установленной на валу 18 привода 11. В каждом ряду 5-8 ведущие 3 и ведомые 4 колеса охвачены поочередно с противоположных сторон гибкими тяговыми элементами 19-22, выполненными в виде зубчатого ремня с зубьями на его внешней и внутренней поверхностях, или в виде ремня с цилиндрическими отверстиями под зубья колес, или в виде цепи, или, наконец, в виде фрикционного ремня (на фиг. не показан). В двух основных рядах 5, 6 одноименные колеса 3 охвачены гибкими тяговыми элементами 19, 20 с одинаковых сторон (сверху). Одноименные колеса 3 (или 4) основных 5, 6 и дополнительных 7, 8 рядов охвачены гибкими тяговыми элементами 19-22 с диаметрально противоположных сторон (если в рядах 5, 6 сверху, то в рядах 7, 8 снизу). В одном из вариантов конструктивного выполнения устройства углы охвата колес 3, 4 гибкими тяговыми элементами 19-22 равны между собой.
Рольганг работает следующим образом.
Крутящий момент на валы 12, 13 первых двух роликов 14, 15 передается от привода 11 через вал 18, его шестерню 17 и зубчатые колеса 16, которые при этом приобретают вращение в одном направлении. Колеса 23, 24 валов 12, 13 первых двух роликов 14, 15 передают при этом вращение через гибкие тяговые элементы 19, 20 остальным колесам основных рядов 5, 6 по прямой линии 25, 26 (фиг.2 и 3) до последних в рядах роликов 27, 28, а колеса 29, 30 (фиг.1) этих валов через гибкие тяговые элементы 21, 22 - остальным колесам дополнительных рядов 7, 8 по обратной линии 31, 32 (фиг.2 и 3). За счет того, что гибкие тяговые элементы 19, 20 (фиг.1) в рядах 5, 6 огибают колеса 3 валов 1 сверху, а гибкие тяговые элементы 21, 22 в рядах 7, 8 - снизу, а также за счет того, что ветви гибких тяговых элементов 19, 20 и 21, 22, взаимодействующие с ведущими колесами 3, движутся в противоположных направлениях, все ведущие колеса 3 и соответственно ролики 2 получают вращение в одну сторону. Раздача мощности в рольганг валами 12, 13 первых двух роликов осуществляется, таким образом, в двух противоположных направлениях. Энергия по гибким тяговым элементам 19, 20 поступает к роликам в одном направлении, а по гибким тяговым элементам 21, 22 к тем же роликам в противоположном направлении.
Момент на валу 18 делится поровну между валами 12, 13 первых двух роликов 14, 15. Приводные колеса 23, 24, 29, 30 получают равные моменты. Но к любому ролику 27, 28 (фиг.2 и 3) подводится мощность с двух диаметрально противоположных сторон по прямой 25, 26 и по обратной 31, 32 линиям. Поэтому любой ролик рольганга получает одну и ту же суммарную мощность.
Поскольку гибкие тяговые элементы 19, 20 и 21, 22 (фиг.1) основных 5, 6 и дополнительных 7, 8 рядов охватывают все взаимодействующие с ними колеса, включая и колеса 23, 24 и 29, 30 валов 12, 13 первых двух роликов 14, 15, и поскольку углы охвата всех колес 3, 4 валов 1 всеми гибкими тяговыми элементами 19-22 идентичны, уравновешиваются противоположно направ- ленные радиальные нагрузки на валы 1 роликов 2 со стороны гибких тяговых элементов 19-22. На степень уравновешенности нагрузок на валы 1 роликов 2, кроме того, не влияет величина идентичного интервала между соседними рядами 5-8 колес, что обеспечено противоположным направлением охвата гибкими тяговыми элементами колес крайних 5, 8 и средних 6, 7 рядов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ДЛИННОМЕРНОГО МАТЕРИАЛА | 1991 |
|
RU2022898C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ДЛИННОМЕРНОГО МАТЕРИАЛА | 1991 |
|
RU2034765C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО МАТЕРИАЛА | 1991 |
|
RU2022899C1 |
| ПРУТКОВЫЙ ЭЛЕВАТОР КОРНЕКЛУБНЕУБОРОЧНОЙ МАШИНЫ | 2007 |
|
RU2347351C1 |
| Рольганг для транспортирования штучных грузов | 1991 |
|
SU1801871A1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
| РАБОЧИЙ ОРГАН ГОРНОГО ОЧИСТНОГО КОМБАЙНА | 1992 |
|
RU2066755C1 |
| Гидроэлектростанция конвейерного типа | 2018 |
|
RU2715444C1 |
| ТРЕХКООРДИНАТНЫЙ ПРИВОД | 2001 |
|
RU2239906C2 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
Использование: в промышленном транспорте, в любой отрасли промышленности, в частности в системах конвейеров для перемещения обрабатываемых фотоматериалов через ванны с обрабатывающими растворами. Сущность изобретения: рольганг содержит ряд валов с установленными на них транспортирующими роликами, два основных ряда установленных на валах колес, ведущие из которых жестко закреплены на каждом валу, а ведомые свободно установлены на внутренних в ряду валах и расположены поочередно с ведущими колесами, и привод, кинематически связанный с одним из валов. Ведущие и ведомые колеса в каждом основном ряду охвачены поочередно с противоположных сторон гибким тяговым элементом. В двух основных рядах одноименные колеса охвачены гибкими тяговыми элементами с одинаковых сторон и расположены в шахматном порядке. Рольганг снабжен двумя дополнительными рядами колес, установленных на валах и охваченных гибкими тяговыми элементами. Привод кинематически связан с другим валом. Оба связанных с приводом вала кинематически связаны между собой, а одноименные колеса основных и дополнительных рядов охвачены гибкими тяговыми элементами с диаметрально противоположных сторон. 2 з.п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| РОЛИКОВЫЙ КОНВЕЙЕР1;;АГ1:уг^;а-т[шчЕош-? г; i-^ 7 - ^ ч -* ^-'* *• л• -;.!'';*>& . игКА |Г. «г: | 0 |
|
SU336224A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
