Изобретение относится к области приборостроения, а именно к высокоточным комплексным навигационным системам с использованием астроизмерений, и применяется в составе бортового оборудования авиационно-космических объектов.
Из существующего уровня техники известен способ построения астроинерциальной навигационной системы (АИНС), реализованный, например, в отечественной системе Л14МА, входящей в состав навигационного пилотажного комплекса (НПК), установленного на самолет Ту-95МС (Черенков С.А., Чесноков Г.И. Юбилейная всероссийская научно-техническая конференция в честь 65-летия Московского института электромеханики и автоматики «Навигация и управление летательными аппаратами» (Труды МИЭА, выпуск 12), М., 2016, с. 34-35), а также в зарубежных аналогах, например системе NAS-26 (Northrop Corporation, Electronics Division, Hawthorno, California, ADA 090649, 1980).
Каждая из вышеуказанных АИНС имеет карданов подвес, который включает внешнюю рамку крена и внутреннюю рамку тангажа гироплатформы, на которой установлены акселерометры системы, обеспечивающие плоскость физического местного горизонта. Для отработки углов нацеливания визирной оси телеблока на выбранный астроориентир телеблок помещается в рамки карданова подвеса - повторителя плоскости физического местного горизонта, связанного аналоговыми или оптическими следящими системами с рамками карданова подвеса гироплатформы. Координаты выбранной звезды (углы нацеливания) вычисляются в осях, лежащих в плоскости местного горизонта, и выдаются из бортовой ЦВМ в качестве целеуказания на нацеливание следящими системами, отрабатывающими эти целеуказания, визирной оси телеблока.
Так, например, определим декартовы координаты визируемой звезды как вектор  , где х1, х2, x3 - декартовы координаты звезды в проекциях на оси сопровождающего трехгранника. Связь между углами нацеливания визирной оси телеблока и декартовыми координатами орта, совпадающего с линией визирования звезды, определяется исключительно схемой карданова подвеса телеблока и кинематикой отработки его углов - А и В. Рассмотрим для определенности азимутально-высотный карданов подвес, при котором наведение на звезду осуществляется разворотом телеблока в азимуте от оси Ox1 на угол А (азимут - угол, отсчитываемый в плоскости местного горизонта от северного направления меридиана против часовой стрелки) и по высоте на угол В (высота - угол, отсчитываемый от плоскости местного горизонта до линии визирования звезды).
, где х1, х2, x3 - декартовы координаты звезды в проекциях на оси сопровождающего трехгранника. Связь между углами нацеливания визирной оси телеблока и декартовыми координатами орта, совпадающего с линией визирования звезды, определяется исключительно схемой карданова подвеса телеблока и кинематикой отработки его углов - А и В. Рассмотрим для определенности азимутально-высотный карданов подвес, при котором наведение на звезду осуществляется разворотом телеблока в азимуте от оси Ox1 на угол А (азимут - угол, отсчитываемый в плоскости местного горизонта от северного направления меридиана против часовой стрелки) и по высоте на угол В (высота - угол, отсчитываемый от плоскости местного горизонта до линии визирования звезды).
Связь между декартовыми координатами звезды и углами А, В разворота телеблока определяется как

Откуда

-TgA=x2/x1,
где х1, х2, x3 - декартовы координаты звезды в проекциях на оси сопровождающего трехгранника.
К недостаткам известной системы можно отнести следующее.
Наличие рамок карданова подвеса - повторителя плоскости горизонта приводит к значительному увеличению габаритов прибора и увеличению его веса. Так, масса системы Л14МА составляет величину порядка 220 кг.
Суммарная ошибка визирования выбранной звезды складывается из ошибок следящих систем, обеспечивающих построение горизонта повторителем, и ошибок следящих систем, обеспечивающих выставку телеблока по целеуказаниям, выдаваемым из бортовой ЦВМ.
При решении задачи построения АИНС путем замены платформенной инерциальной навигационной системы (ИНС) на бесплатформенную (БИНС) возможны варианты, связанные со спецификой построения БИНС - отсутствие карданова подвеса, обеспечивающего построение физического местного горизонта.
За основу для реализации одного из таких вариантов построения АИНС берется система Л14МА, в которой гироплатформа (ПГ-3) заменяется на БИНС; при этом аналоговые следящие системы, обеспечивающие горизонтирование повторителя, заменяются на цифровые следящие системы, отрабатывающие горизонт по цифровым кодам углов курса, крена и тангажа, поступающих с выхода БИНС по каналам последовательного двоичного кода (ПДК). Также возможен вариант построения АИНС, по которому бортовая ЦВМ БИНС и ее программа дорабатываются соответственно цифроаналоговыми преобразователями (ЦАП) и включением в программу блока вычисления Sin и Cos углов курса, крена и тангажа и выдачи на ЦАП грубого и точного каналов существующих следящих систем.
Рассмотренные выше варианты практически не дают каких-либо преимуществ в плане повышения точности системы или снижения габаритно-весовых характеристик, поскольку и сама структура системы, и, в частности, повторитель плоскости горизонта сохраняются.
В патенте РФ №2442108, G01C 21/00, 27.10.2010 рассмотрена АИНС, в которой аналоговые следящие системы, обеспечивающие связь между гироплаформой и рамками карданова подвеса - повторителя горизонта, заменены на оптические следящие системы, обеспечивающие связь между блоком чувствительных элементов (БЧЭ) БИНС и визирной осью телеблока. При этом отпадает необходимость в наличии рамок карданова подвеса - повторителя плоскости горизонта, что повлечет за собой снижение габаритно-весовых характеристик прибора. Однако при такой компоновке прибора многоуровневая структура связи визирной оси телеблока с осями чувствительности корректируемой системы остается, т.е. остается проблема связи визирной оси теблока с призмами оптической следящей системы и связи этих призм с осями чувствительности акселерометров корректируемой системы, т.е. потенциальное увеличение точности может быть достигнуто только за счет применения более точных оптических следящих систем, обеспечивающих стабилизацию телеблока в плоскости местного горизонта.
В качестве прототипа выбран способ построения АИНС, реализованный в серийной астроинерциальной системе Л-41 (Черенков С.А., Чесноков Г.И. Юбилейная всероссийская научно-техническая конференция в честь 65-летия Московского института электромеханики и автоматики «Навигация и управление летательными аппаратами» (Труды МИЭА, выпуск 12), М., 2016, с. 34-35).
В известном способе использование однокоординатного визирного устройства в телеблоке АВ1СМ позволило построить схему привязки к базовому контрольному элементу (БКЭ), представляющему 72-гранную призму, непосредственно самим телеблоком, которым производится визирование звезд, что позволило исключить промежуточные элементы в оптической связи, а именно повторитель плоскости горизонта, повысив тем самым точность визирования звезд.
В известном способе карданов подвес телеблока обеспечивает три степени свободы - разворот телеблока вокруг двух горизонтальных осей и вокруг вертикальной оси в азимуте. Применение консольной схемы карданова подвеса телелеблока обеспечивает получение двух измерений при визировании одной звезды однокоординатным астродатчиком - визирование звезды при развороте телеблока на некоторый угол в азимуте и повторное визирование той же звезды при развороте телеблока в азимуте на угол, отличающийся от первоначального на 90°. Применение трехканальной следящей системы при отработке азимутального угла - грубый канал, построенный на синусно-косинусных трансформаторах (СКТ), для грубой отработки угла, точный канал, построенный на 32-полюсных СКТ с коэффициентом редукции 32, и оптический канал, построенный на вращающихся оптических клиньях с коэффициентом редукции 72, - позволило получить точность отработки азимутального угла порядка единиц угловых секунд.
Кроме того, использование при проведении измерений (определение координаты визируемой звезды и определение ошибок привязки к базовой приборной системе координат) одного и того же чувствительного элемента, а именно визирной оси телеблока (при этом и визирование звезды, и привязка к одной из выбранных граней БКЭ проводится в одной и той же плоскости), позволило исключить такие конструктивные ошибки прибора, как неколлинеарность и неортогональность осей кардана телеблока и осей базового приборного трехгранника, поскольку получаемые измерения определяются как угол визирования звезды за вычетом угла, получаемого в режиме привязки к БКЭ.
Недостатком известного способа является недостаточная точность астровизирования. Поскольку практическое изготовление 72-гранной призмы практически невозможно, все грани призмы паспартизуются относительно исходной нулевой грани призмы и поправки на ошибки ориентации этих граней заносятся в постоянную память (ПЗУ) и алгоритмически учитываются в рабочей программе. Таким образом, комплексная задача привязки визирной оси телеблока сводится к привязке нормали исходной (нулевой) грани БКЭ к базовой системе отсчета приборного трехгранника.
Технической задачей изобретения является повышение точности астровизирования.
Указанная техническая задача решается благодаря способу построения астроинерциальной навигационной системы, заключающемуся в выборе звезды, доступной визированию в данной точке местоположения визирующего объекта в данный момент времени, вычислении ее декартовых координат в проекциях на оси сопровождающего трехгранника и углов наведения на нее телеблока, последующем визировании звезды с определением ее фактических координат, которые пересчитываются в ошибки корректируемой системы, при этом на этапе визирования звезды основание телеблока устанавливается в плоскости местного горизонта, причем определенные в проекциях на оси сопровождающего трехгранника декартовы координаты звезды перепроектируются на оси базового приборного трехгранника перемножением вектора ее декартовых координат на транспонированную матрицу ориентации визирующего объекта, и по полученным декартовым координатам в проекциях на оси приборного трехгранника вычисляются углы наведения телеблока, которые используются в качестве целеуказания при визировании звезды.
В соответствии с предлагаемым способом построения астроинерциальной навигационной системы декартовы координаты орта, совпадающего с линией визирования выбранной звезды, определенные в осях сопровождающего трехгранника перепроектируются на оси базового приборного трехгранника умножением их на транспонированную матрицу ориентации Эйлера-Крылова, являющуюся функцией углов крена, тангажа и курса объекта и вычисляемую в рабочей программе БИНС вычислителя в соответствии с формулой

где  - орт, совпадающий с линией визирования звезды, определенный в проекциях на оси базового приборного трехгранника;
- орт, совпадающий с линией визирования звезды, определенный в проекциях на оси базового приборного трехгранника;
Ат - транспонированная матрица ориентации;
х - вектор декартовых координат звезды в проекциях на оси сопровождающего трехгранника.
Связь между базовым приборным и сопровождающим трехгранниками определяется тремя последовательными разворотами сопровождающего трехгранника на курсовой угол ψ вокруг оси Ох3, на угол тангажа υ вокруг оси Ох2, на угол крена γ вокруг оси Ох1, что соответствует последовательному перемножению матриц

где А - матрица ориентации;
Ψ - матрица разворота сопровождающего трехгранника на курсовой угол ψ;
υ - матрица разворота сопровождающего трехгранника на угол тангажа υ;
Г - матрица разворота сопровождающего трехгранника на угол крена γ.
Отсюда получаем

В таком случае углы разворота телеблока (для рассматриваемого азимутально-высотного подвеса) определятся как


Таким образом, по предлагаемому способу углы разворота телеблока определяются с учетом разворота прибора и соответственно карданова подвеса телеблока в пространстве относительно местного горизонта, что исключает необходимость в установке карданова подвеса - повторителя плоскости местного горизонта и тем самым приводит к повышению точности визирования звезды за счет исключения промежуточного канала отработки горизонта следящих систем без усложнения общей конструкции прибора. Инструментальные ошибки взаимной привязки визирной оси телеблока с системой координат базового приборного трехгранника определяются на угломерных измерительных стендах в процессе проведения стендовых испытаний и учитываются в качестве компенсационных поправок в рабочих алгоритмах и программах.
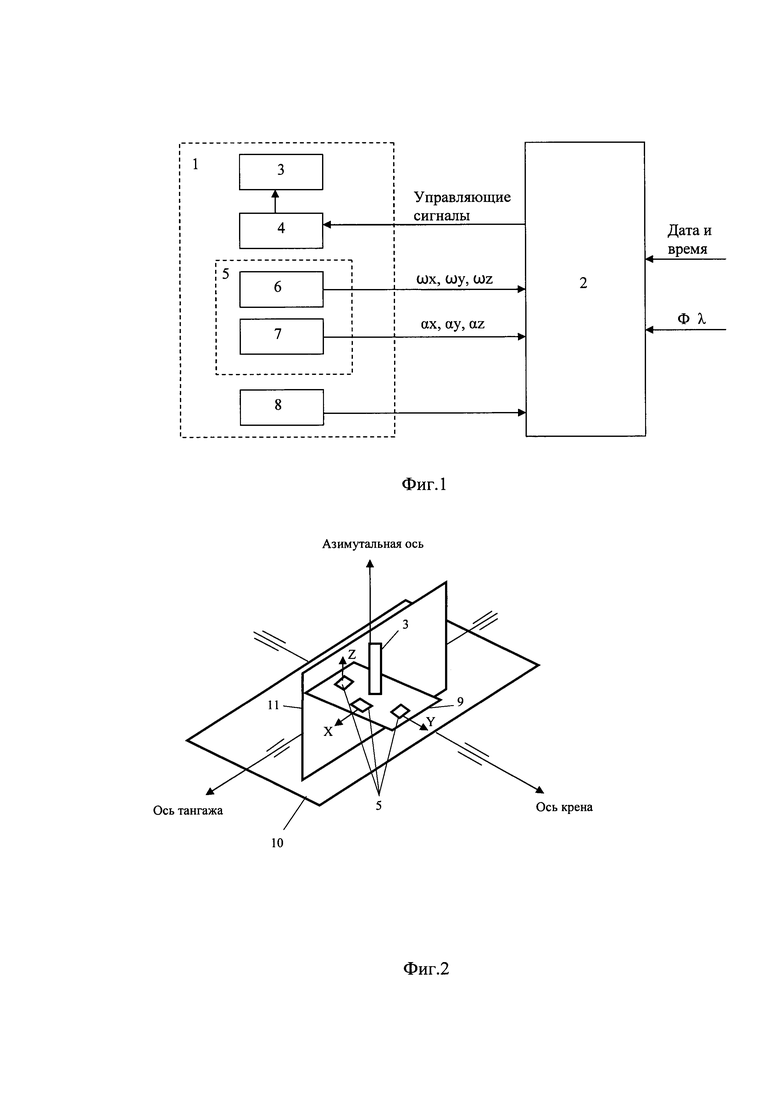
В состав астроинерциальной системы, реализующей предложенный способ, структурно входят астровизирующее устройство 1 и аппаратно соединенный с ним цифровой вычислитель 2 (бортовая ЦВМ), принимающий сигналы от потребителя и реализующий алгоритмы БИНС (фиг. 1). Астровизирующее устройство включает телеблок 3, следящие системы, реализованные в виде блока управления приводом карданного подвеса для наведения телеблока на астроориентир 4, подключенного к телеблоку 3 своим выходом, а входом - к вычислителю 2, блок чувствительных элементов (БЧЭ) БИНС 5, включающий трехосный блок микромеханических гироскопов 6 с блоком акселерометров 7, а также блок измерения углового положения астровизирующего устройства 8, подключенные своими выходами к соответствующим входам вычислителя 2. Астровизирующее устройство конструктивно состоит из платформы 9 с установленными на ней обнаруживающим астроориентир телеблоком 2 и БЧЭ БИНС 5 - трехосными блоком микромеханических гироскопов 6 и блоком акселерометров 7 (фиг. 1, 2). Платформа 9 устанавливается в азимутально-высотном кардановом подвесе, который включает внешнюю рамку крена 10, вращающуюся относительно каркаса, и соединенную с ней вращательно внутреннюю рамку тангажа 11, посредством которых платформа 9 имеет возможность поворачиваться в подшипниках по осям тангажа и крена. Платформа 9 жестко соединена с внутренней рамкой тангажа 11 и устанавливается вдоль вертикали, которой идеально коллинеарна оптическая ось телеблока 3.
Таким образом, телеблок и чувствительные элементы БЧЭ БИНС установлены на единой платформе так, что оси чувствительности гироскопов и акселерометров жестко связаны с осями отработки углов наведения телеблока, в результате чего целеуказания углов наведения телеблока формируются в осях базового приборного трехгранника по информации об углах курса, крена и тангажа, получаемой с БИНС. Такая схема обеспечивает снижение количества каналов следящих систем в блоке 4 за счет исключения каналов следящих систем отработки горизонта, что позволяет потенциально повысить точность астровизирования.
Заявленный способ осуществляется следующим образом.
Вычислитель 2 астронавигационной системы получает информацию от потребителя (навигационно-прицельного комплекса) о местоположении объекта, дате и времени местоположения объекта в конкретной точке. Вычислитель решает навигационные уравнения в режиме «Выставка» и в режиме «Навигация», используя чувствительные элементы БЧЭ БИНС 5, находящиеся на рамках карданного подвеса телеблока 3. В режиме «Астронавигация» вычислитель решает задачу выбора астроориентира, используя сигналы с датчиков БЧЭ БИНС. При выработке управляющих сигналов для блока управления приводами карданного подвеса для наведения телеблока на выбранный астроориентир, а также сопровожения этого астроориентира, используются одни и те же чувствительные элементы БЧЭ БИНС, что позволяет исключить ошибки привязки к базовой приборной системе координат, а, следовательно, повысить точность астровизирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2654965C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩИХ ПОПРАВОК В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2017 |
|
RU2654964C1 |
| СИСТЕМА АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2016 |
|
RU2639583C1 |
| СПОСОБ АСТРОКОРРЕКЦИИ | 2016 |
|
RU2641619C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2378616C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ ДОВОДОЧНЫХ СТУПЕНЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2440557C9 |
| СПОСОБ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442108C1 |
Изобретение относится к области приборостроения, а именно к высокоточным комплексным навигационным системам с использованием астроизмерений, и может найти применение в составе бортового оборудования авиационно-космических объектов. Технический результат - повышение точности астровизирования. Для этого осуществляют выбор звезды, доступной визированию в данной точке местоположения визирующего объекта в данный момент времени, вычисляют ее декартовые координаты в проекциях на оси сопровождающего трехгранника и углы наведения на нее телеблока, последующее визирование звезды с определением ее фактических координат, которые пересчитываются в ошибки корректируемой системы, при этом на этапе визирования звезды основание телеблока устанавливается в плоскости местного горизонта. Причем определенные в проекциях на оси сопровождающего трехгранника декартовы координаты звезды перепроектируются на оси базового приборного трехгранника перемножением вектора ее декартовых координат на транспонированную матрицу ориентации визирующего объекта, и по полученным декартовым координатам в проекциях на оси приборного трехгранника вычисляются углы наведения телеблока, которые используются в качестве целеуказания при визировании звезды. 5 ил.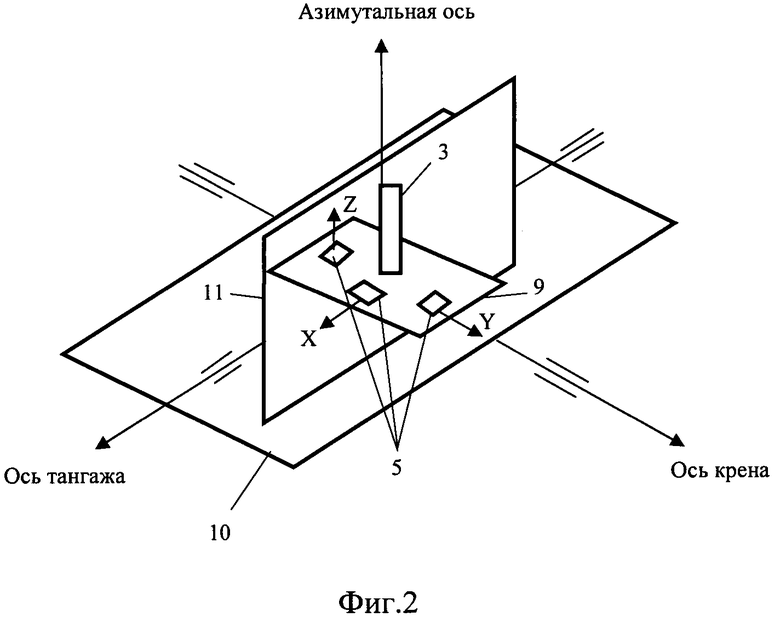
Способ построения астроинерциальной навигационной системы, заключающийся в выборе звезды, доступной визированию в данной точке местоположения визирующего объекта в данный момент времени, вычислении ее декартовых координат в проекциях на оси сопровождающего трехгранника и углов наведения на нее телеблока, последующем визировании звезды с определением ее фактических координат, которые пересчитываются в ошибки корректируемой системы, при этом на этапе визирования звезды основание телеблока устанавливается в плоскости местного горизонта, отличающийся тем, что определенные в проекциях на оси сопровождающего трехгранника декартовы координаты звезды перепроектируются на оси базового приборного трехгранника перемножением вектора ее декартовых координат на транспонированную матрицу ориентации визирующего объекта, и по полученным декартовым координатам в проекциях на оси приборного трехгранника вычисляются углы наведения телеблока, которые используются в качестве целеуказания при визировании звезды.
| СПОСОБ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442108C1 |
| Черенков С.А., Чесноков Г.И | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2378616C1 |
| US 5396326 А, 07.03.1995 | |||
| СПОСОБ ЛЕЧЕНИЯ ХРОНИЧЕСКИХ ГЕПАТИТОВ | 1998 |
|
RU2175237C2 |

