Изобретение относится к микроэлектронике, вибротехнике, технике ультразвука и другим областям науки и техники, использующим линейные перемещения малой амплитуды (2-50 мкм).
Известны двигатели малых перемещений (Кусимов С.Г., Тлявлин А.В. Магнитострикционные исполнительные двигатели малых перемещений. Уфа, УАИ, 1981), использующие принцип магнитострикционной способности специальных материалов изменять линейные размеры при помещении их в магнитное поле. Такие двигатели дают возможность получать линейные перемещения объекта только по одной координате.
Известен трехкомпонентный двигатель линейных перемещений (заявка Великобритании N 2139819, кл. H 01 L 41/00, 1984) принятый за прототип, позволяющий путем последовательного соединения трех линейных двигателей получать смещения объекта в трех координатах. Здесь конец одного двигателя соединяется с началом другого с поворотом осевой плоскости биморфного элемента на 90о относительно предыдущего для соединения "первый-второй" и два раза по 90о для соединения "второй-третий".
Однако при использовании одинаковых двигателей объект перемещается не точно с одинаковой амплитудой из-за различных рычагов приложения усилия, а кроме того перемещения происходят не точно под углами 90о декартовой системы, а под острыми и тупыми углами к декартовой системе. Нагрузочная способность и надежность таких двигателей невелика.
Целью изобретения является повышение нагрузочной способности и точности перемещений.
Указанная цель достигается тем, что биморфные элементы выполнены из металлов с положительными и отрицательными коэффициентами магнитострикции, снабжены обмотками возбуждения, отделенными от биморфных элементов теплоизолирующей прослойкой, и соединены между собой посредством жестких балочек из немагнитопроводящего материала так, что конец Z-двигателя соединен с началом Х-двигателя, а конец Х-двигателя с началом Y-двигателя, причем концы Х и Y-двигателей находятся на Y-оси.
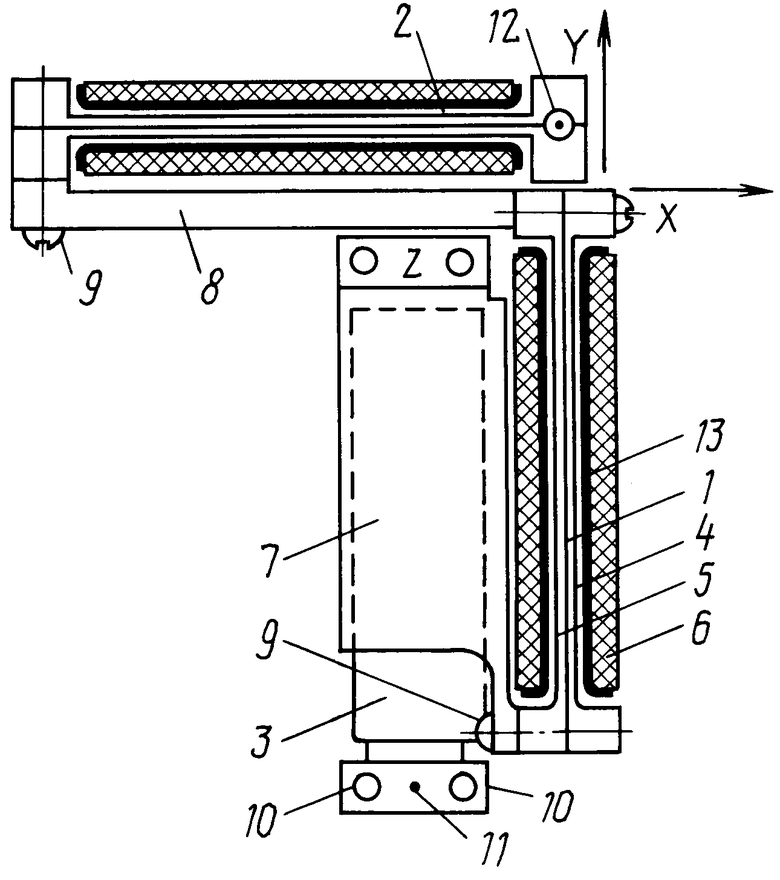
На чертеже изображен общий вид описываемого двигателя. Позициями 1, 2 и 3 обозначены одинаковые двигатели X, Y и Z перемещений. Каждый двигатель состоит из одинаковых биморфных половинок 4 и 5, выполненных из металлов один с положительным и второй с отрицательным коэффициентом магнитострикции, склеенных вместе по осевой плоскости. На каждом двигателе находится обмотка возбуждения 6. Конец Z-двигателя соединен с началом Х-двигателя балочкой 7, а конец Х-двигателя соединен с началом Y-двигателя балочкой 8. Балочки являются элементами жесткости и выполняются из легких немагнитопроводящих материалов, например титана или Д16Б. Двигатели жестко соединяются с балочками винтами 9. Винтами 10 двигатель крепится к неподвижному основанию.
Двигатель работает следующим образом. После закрепления на основании точки 11 точкой 12 двигатель соединяется с перемещаемым объектом. При подаче напряжения в соответствующий двигатель точка 12 получает смещение в трех взаимно перпендикулярных направлениях X, Y и Z. Для уменьшения влияния на работу двигателя тепловыделений в обмотке возбуждения она отделяется от активного элемента теплоизоляционной прослойкой 13, например, из стекловолокна. При работе в вакууме достаточно простого равномерного зазора между активным элементом и обмоткой. К точке 12 может укрепляться держатель, на котором устанавливается кремниевая подложка.
В зависимости от необходимых усилий выбираются размеры каждого двигателя. Поскольку при микролитографии имеют дело с подложками из кремния, которые, например, при диаметре 100 мм имеют массу порядка 10 г, необходим двигатель на усилие порядка 100 г по каждой компоненте. Такой двигатель обеспечивается активными элементами с близкими по абсолютной величине коэффициентами магнитострикции, например 49КФ2А (Co 49%, V 2%, Fe 49%) и НП2Т (Ni 98%, Ti 2%). Указанные усилия обеспечиваются активным элементом шириной 10, длиной 40 и толщиной 2 мм. При этом достигаются смещения до 30 мкм по каждой координате.
Двигатель технологичен в изготовлении - одинаковые элементы легко изготавливаются на металлообрабатывающем оборудовании, в применении двигатель не боится резких ударов и перегрузки, как керамика и пьезокристаллы. При подаче одинаковой величины напряжения в каждую из обмоток получаются одинаковые величины смещений по каждой координате. Например, при напряжении 10 В двигатель дает смещение 20 мкм. Дискретность изменения напряжения легко устанавливается в 0,01 В (например, стандартным источником питания Б5-46), при этом дискретность шага движения обеспечивается 0,02 мкм. При меньшем дискрете может быть получен и меньший шаг движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1993 |
|
RU2032967C1 |
| ПОЗИЦИОНЕР ТРЕХКООРДИНАТНЫЙ | 2005 |
|
RU2297078C1 |
| Устройство для компенсации погрешностей кузнечно-прессового оборудования | 1989 |
|
SU1646896A1 |
| Устройство для формирования дозных полей | 1974 |
|
SU576684A1 |
| Устройство для центрировки линз | 1986 |
|
SU1365016A1 |
| Трехкомпонентный датчик для сейсмического моделирования | 1984 |
|
SU1190325A1 |
| Зеркало с регулируемой кривизной | 1987 |
|
SU1543366A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2028927C1 |
| ДАТЧИК УСИЛИЙ ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1997 |
|
RU2114405C1 |
| СПОСОБ НАКОПЛЕНИЯ МР-ТОМОГРАММЫ ОТ ОБЪЕКТА, ИСПЫТЫВАЮЩЕГО СЛУЧАЙНЫЕ ПЕРЕМЕЩЕНИЯ | 1992 |
|
RU2038586C1 |
Использование: в устройствах микроперемещений. Сущность: конструкция двигателя включает три одинаковых биморфных двигателя, выполненных из металлов с положительным и отрицательным коэффициентами магнитострикции. Двигатели соединены между собой жесткими балочками из немагнитопроводящих материалов так, что конец Z-двигателя соединен с началом X-двигателя, а конец X-двигателя соединен с началом Y-двигателя, концы X и Y-двигателей находятся на Y-оси, для уменьшения влияния тепловыделений на работу двигателя обмотка отделяется от активного элемента теплоизолирующей прослойкой. Двигатель позволяет получать дискрет перемещения порядка 0,01 мкм. 1 ил.
ТРЕХКОМПОНЕНТНЫЙ ДВИГАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ, содержащий три биморфных элемента перемещений по трем координатным осям x, y, z, склеенных из двух разнополярных электромеханических преобразователей и последовательно соединенных соединительными элементами, отличающийся тем, что, с целью повышения нагрузочной способности и точности перемещения, биморфные элементы выполнены из металлов с положительным и отрицательным коэффициентами магнитострикции, снабжены обмотками возбуждения, отделенными от биморфных элементов теплоизолирующей прослойкой и соединены между собой посредством жестких балочек из немагнитопроводящего материала так, что конец биморфного элемента перемещений по оси z соединен с началом биморфного элемента перемещений по си x, конец которого соединен с началом биморфного элемента перемещений по оси y, причем концы биморфных элементов перемещений по осям x и y расположены на оси y.
| СЛОИСТЫЙ СОСУД | 1999 |
|
RU2139819C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
