1
Изобретение относится к облает медицинской техники и предназначено для луче130Й терапии онкологических больных.
Известно устройство для формнрования ДОЗНЫХ нолей путем перемещения источника излучения но осям ротации и конвергенции, состоящее из источника излучения, следящего привода перемещепия источника излучеиия и управляющего устройства 1.
Однако известное устройство не позволяет осуществлять запрограммированное простра.нственно-временное дозпое распределепие.
Цель изобретения - создание запрограммированного пространственно-временного дозного раснределения.
Это достигается тем, что управляющее устройство включает программатор трехмерных координат и две расшифровывающие следящие системы, каждая из которых состоит из двух синусно-косинусных вращающихся трансформаторов и исполнительного двигателя, причем выходной вал исполнительного двигателя кинематически связан с роторами трансформаторов, одна из выходных обмоток трансформатора соединена с управляющей обмоткой исполнительного двигателя. Выходы программатора, соответствующие значениям координат горизонтальной плоскости, соединены с обеими ста2
торными обмотка.мн одного из трансфор.маторов перБой следящей системы. Выход программатора, соответств чощнй значению координат, совнадающнх с вертикалью, и свободная роторная обмотка одного из трансформаторов первой следящей системы соединены с обеими статорными обмотками одного из траисформаторов второй следяндей систем1з1, выход другого трансформатора этой же следящей системы, включенного по схеме линейного вращающегося трансформатора, соединен с одной из статорных обмоток другого трансформатора первой следящей системы, а выходные роторные обмоткн этого трансформатора соединены с соответствующими входами следящих приводов. Программатор включает в себя не менее двух частей, каждая из которых содержит два магишопровода, на которых расположены соединенные последовательно обмотки возб -ждення и измерительные обмотки, соед1111еннь е встречно, а в зазоре магнитонроводов номещен вращающийся диск с изменяемым профилем, по окружности которого расположены лепестки, с возможностью смещения пх относительно геометрической нейтрали.
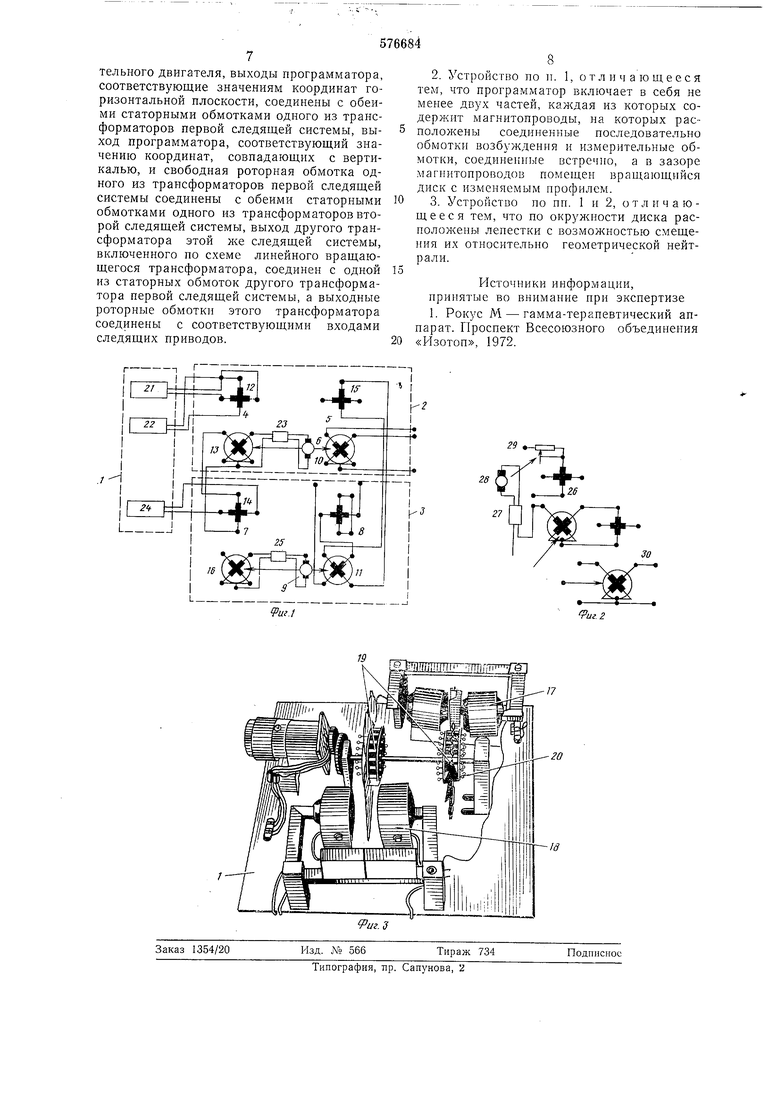
На фиг. 1 изображена принципиальная схема предлагаемого устройства; на фиг. 2- прннципиальная электрическая схема для
определения координат х и у по направлениям облучения; на фиг. 3 - программатор.
Устройство содержит управляющее устройство, включающее программатор и две расшифровывающие следящие системы 2 и 3, причем система 2 состоит из двух синусно-косинусных вращающихся трансформаторов 4 и 5 и исполнительного двигателя 6, а система 3 из трансформаторов 7 и 8 и двигателя 9. Выходной вал двигателя 6 кинематически связан с ротором 10 трансформатора 5, а вал двигателя 9-с ротором 11 трансформатора 8. Одна из выходных обмоток ротора 13 трансформатора 4 соединена с управляющей обмоткой двигателя 6. Выходы программатора 1, соответствующие значениям координат горизонтальной плоскости, соединены с обеими обмотка.ми 12 статора, а выход программатора, соответствующий значению координат, совпадающих с вертикалью, и свободная обмотка ротора 13 трансформатора 4 соединены с обеими обмотками етатора 14 трансформатора 7. Ротор 11 трансформатора 8, включенного по схеме линейного вращающегося трансформатора, соединен с одной из обмоток статора 15 трансформатора 5, а обмотки ротора 16 соединены с соответствующими входами двигателя 9. Причем программатор 1 содержит не менее двух частей, каждая из которых содержит два магнитопровода 17 и 18, на которых расположены соединенные последовательно обмотки возбуждения и измерительные обмотки, соединенные встречно, а в зазоре магнитопроводов помещен вращающийся диск 19 с изменяемым профилем, по окружности которого расположены лепестки 20 с возможностью смещения их относительно геометрической нейтрали.
Устройство работает следующим образом.
Напряжения, снимаемые с преобразователей 21 и 22 программатора 1, пропорциональные заданным (t) и (t), подаются на обе статорные обмотки трансформатора 4 и с его синусной обмотки ноступают на управляющую обмотку исполнительного двигателя 6, выходной вал которого механически связан с роторами 10 и 13.
Напрях ение, снимаемое с синусной обмотки трансформатора 4, выражено форм)лой
81п ок(- 81ПТ-у С08ср),(I)
гдел; /(0, );
UOK - масштаб выходных величин; Ф - текущее значение углов поворота роторов 13 и 10.
Аргумент ф определяется в результате автоматического решения уравнения (1) следящей системой, состоящей из трансформатора 4, усилителя 23 и двигателя 6.
Напряжение, снимаемое с косиргусной обмотки этого трансформатора,
cos o.(+f)(+) f/oK -« cos9-fz/ sin(p (2)
пропорциональио геометрической сумме заданных координат.
Данное напряжение подается на обмотку статора 14, а на другую обмотку подается напряжение преобразователя 24, пропорциональное (t).
Выходная синусная обмотка трансформатора 7 через усилитель 25 соедиияется с управляющей обмоткой исполнительного двигателя 9, выходной вал которого кинематически связан с роторами 16 и П.
Напряжение, снимаемое с синусной обмотки трансформатора 7, выражено формулой
sin t/oK 2smE-flf cosE, (3)
тле z f(f),
UOK - масштаб выходных величин; Е - текущее значение угла поворота роторов 16 и 11.
Аргумент Е определяется в результате автоматического решения уравнения (3) следящей системой, состоящей из трансформатора 7, усилителя 25 и двигателя 9.
Напряжение, снимаемое с его косинусной обмотки,
t/eos о,2 Sin (- +Е) X
X (+)1 o. + 2 sin-E (4)
пропорционально геометрической сумме координат
р .
Носле поворота роторов 11 на угол Е и 15 на угол ф напряжения, снимаемые с выходных роторных обмоток трансформатора 5, будут пропорциональны соответствующим законам изменения скоростей ротации и конвергенции.
На фиг. 2 представлена схема, позволяющая определить координаты л: и г/ по направлениям облучения, заданным углами .места Е и азимута ф. Выходную косинусную обмотку трансформатора 26 и выход преобразователя 24, воспроизводящего условия облучения, совпадающие с вертикалью, подключают к обоим входам усилителя 27, выход которого подключен к управляющей обмотке исполнительного двигателя 28, регулирующего напряжение на статорной обмотке трансформатора 26, и поворачивают его ротор на угол Е. Двигатель будет поворачивать ротор регулятора 29 напряжения до тех пор, пока напряжение на выходе усилителя не станет равным нулю.
В этот момент напряжение, снимаемое с косинусной обмотки трансформатора 1 f/cos f oKCOsE будет равно напряжению, снимаемому с выхода преобразователя 24, т. е. пропорционально z, где UQK - масштаб выходных величин.
Очевидно, что напряжение на входной статорной обмотке 1 будет пропорционально
+ z
R
cos в
геометрической сумме координат. Напряжение, снимаемое с синусной обмотки Usin
R d x-{-y будет пропорционально геометрической сумме координат, расположенных в горизонтальной плоскости, и поступает на статорную обмотку трансформатора 30.
После поворота его ротора на угол ф напряжения, снимаемые с выходных роторных обмоток, будут пропорциональны координатам X и у, расположенным в горизонтальной плоскости.
По условиям облучения строят (t), (t), которые воспроизводятся функциональными преобразователями 21 и 22.
С целью лучшего представления создаваемого объемного дозного распределения. контроля обхода критических органов, перед началом лучевого лечения необходимо представление и контроль формы создаваемой изодозной кривой в плоскостях, повернутых на углы Е и ф, совпадающих с критическими направлениями облучения. Выходную косинусную обмотку трансформатора 4 следящей системы 2 и выход преобразователя 24 подключают к обоим входам трансформатора 7 следящей системы 3 и поворачивают ее на угол Е, составленный с вертикалью. Тогда напряжения, снимаемые с выходных роторных обмоток трансформатора 7,
C/sin Ud Ud cos Е - (Уг sin Е; t/cos Uz Ud sin E + f/z cos E,
где
Uz z;
+ y;
.
d, z - проекции вектора в повернутой системе координат, будут пропорциональны проекциям вектора в повернутой системе координат, совпадающего с направлением расположения критических органов.
Выходную синусную обмотку трансформатора 7 подключают к одной из входных статорных обмоток трансформатора 5 следящей системы 2.
После поворота ротора 15 на угол ф с его выходных обмоток снимутся напряжения
i/sin Ud sin р;
cos Ud cos ,
где Ud d; d x + y,
пропорциональные проекциям вектора вновой системе координат.
В соответствии с вышеизложенным способом регистрируют дозное распределение в каждой из трех взаимно перпендикулярных плоскостей и форму изодозной кривой
в каждой из двух взаимно перпендикулярных плоскостей, совпадающих с направлением расположения критических органов.
Если при укладке больного по каким-либо причинам невозможно совместить координаты залегания опухоли с точкой пересечения осей ротации и конвергенции, напряжения, снимаемые с преобразователей 21 и 22, подаются также на вход следящих систем продольного и поперечного перемещения стола.
С целью запроса аппаратуры перед началом лучевого лечения и регистрации формы, создаваемой изодозной кривой, например в плоскости ротации, на входы следящей сисхемы 2 подают напряжения, снимаемые с преобразователей 21 и 24, пропорциональные заданным условиям облучения ()
(0.
Аналогично вышелзлолсенному, в результате автоматического решения уравнения
Usia - UOK 2 Sin ар - л; cos ,
где X - f (t) 2 :: / (),
следящей системой будет определен аргумент ф. Одновременно через трансформатор 5 пропускают напряжение, обратно пропорциональное создаваемому в этом направлении градиенту дозы, а выходные роторные обмотки подключают к соответствующим входам двухкоординатного регистрирующего прибора (на чертеже не показан).
Формула изобретения
1. Устройство для формирования дозных
полей, состоящее из источника излучения, следящего привода перемещения источника излучения и управляющего устройства, отличающееся тем, что, с целью создания запрограммированного пространственновременного дозного распределения, управляющее устройство включает программатор трехмерных координат и две расшифровывающие следящие системы, каждая из которых состоит из двух синусно-косинусных
вращающихся трансформаторов и исполнительного двигателя, причем выходной вал исполнительного двигателя кинематически связан с роторами трансформаторов, одна из выходных обмоток трансформатора соединена с управляющей обмоткой исполни
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ДОЗНЫХ ПОЛЕЙ | 2000 |
|
RU2192901C2 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1968 |
|
SU217485A1 |
| СЧЕТНО-РЕШАЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU408325A1 |
| УСТРОЙСТВО Для КОНТРОЛЯ СИНХРОННО-СЛЕДЯЩИХСИСТЕМ | 1969 |
|
SU251649A1 |
| Цифро-аналоговая следящая система | 1976 |
|
SU572774A1 |
| Преобразователь перемещения в число импульсов | 1973 |
|
SU470843A1 |
