Изобретение относится к автоматизации подвески переносимых грузов к объектам их перемещения, в частности к летательным аппаратам.
Известно устройство, содержащее основание и подъемную платформу, связанные приводом подъема, конвейер, смонтированный на подъемной платформе, для перемещения грузов с горизонтальной плоскости и связанный с блоками с запасованным на них гибким звеном, с целью расширения зоны обслуживания, оба конца гибкого звена связаны с общими концами пружины растяжения, другие концы которых снабжены замковыми устройствами для сцепления их основанием подъемника [1].
Недостатками данного устройства является обеспечение только выполнения подъемно-транспортных операций с одной позиции на другую, а остальные операции технологического цикла осуществляются обслуживающим персоналом, согласование подъемной платформы с принимающей платформой возможно только в вертикальной плоскости, что предъявляет жесткие требования к точности установки принимающей платформы по горизонтальным координатам, т.е. управление подвижной платформой происходит только по вертикальной координате, что ограничивает функциональные возможности устройства.
Наиболее близким по своей технической сущности к данному является устройство, содержащее гидроцилиндры подъема, шарнирно-рычажный механизм и платформу [1].
Один край платформы шарнирно соединен с одними рычагами шарнирно-рычажного механизма, а другой свободно сопряжен с концами других рычагов шарнирно-рычажного механизма.
Недостатки данного устройства следующие. Устройство позволяет осуществлять перемещение груза только в вертикальной плоскости, что существенно ограничивает функциональные возможности устройства; конструкция грузоподъемного устройства не позволяет производить перемещение платформы в любую точку внутри заданной области пространства, устройство не позволяет ориентировать грузовую платформу по угловым координатам, что ограничивает точностные возможности процесса подвески грузов.
Целью изобретения является повышение точности доставки грузов.
Цель достигается тем, что в устройство для управления подвеской грузов на объект, содержащее подвижную платформу для размещения грузов с подъемными блоками, соединенными с электроприводами, подключенными к блоку питания, введены платформа для установки объекта размещения груза с датчиком исходного состояния, блоком исполнительных двигателей, датчиком положения объекта, первый коммутатор, цифроаналоговый преобразователь, схема вычитания, блок определения координат объекта, блок памяти, нуль-орган, второй коммутатор, датчик-ограничитель и датчик подвески, причем выход датчика положения соединен с первым входом первого коммутатора, первый выход коммутатора соединен с первым входом блока памяти, второй выход коммутатора соединен с входом блока определения координат и с вторым входом блока памяти, первый, второй, третий и четвертый выходы блока определения координат соединены соответственно с первым, вторым, третьим и четвертым входами схема вычитания, первый, второй, третий и четвертый выходы блока памяти соединены соответственно с пятым, шестым, седьмым и восьмым входами схемы вычитания, первый, второй, третий и четвертый выходы схемы вычитания соединены соответственно с первым, вторым, третьим и четвертым входами цифроаналогового преобразователя, а также с первым, третьим и четвертым входами нуль-органа, первый, второй, третий и четвертый выходы цифроаналогового преобразователя соединены соответственно с первым, вторым, третьим и четвертым входами блока исполнительных двигателей платформы для установки объекта размещения груза, выход датчика исходного состояния соединен с вторым входом коммутатора, выход нуль-органа соединен с первым входом второго коммутатора, выходы второго коммутатора соединены с входами электроприводов подъемного устройства, первый и второй выходы блока питания соединены с первым и вторым входами второго коммутатора, выход датчика ограничителя подъемного блока соединен с третьим входом первого коммутатора и с третьим входом второго коммутатора, выход датчика подвески соединен с вторым входом второго коммутатора, выход датчика исходного состояния соединен с сигнализатором готовности, а третий выход блока питания подключен к четвертому входу первого коммутатора, при этом датчик положения механически соединен с платформой для установки объекта размещения груза, а датчик исходного состояния механически соединен с блоком исполнительных двигателей.
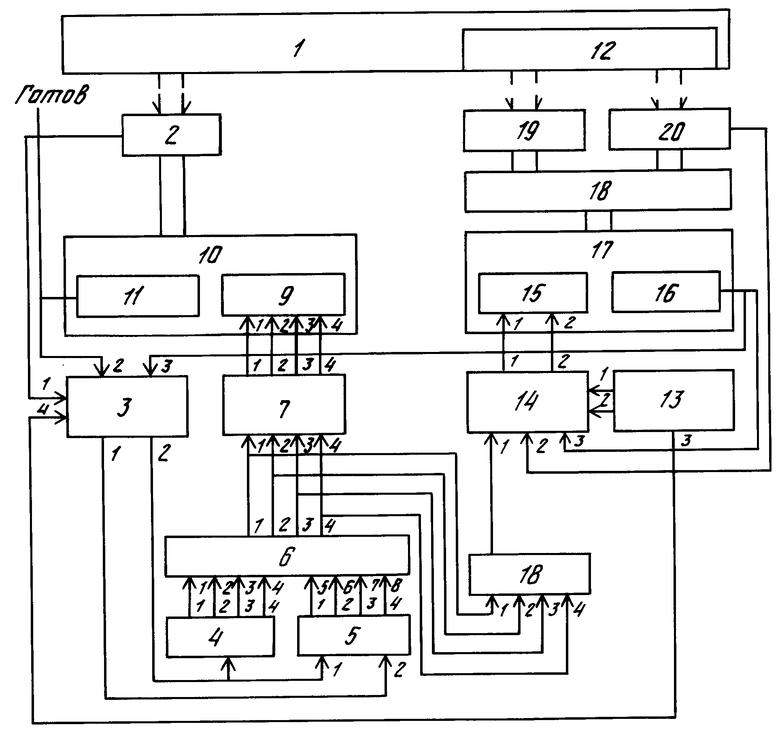
На чертеже представлена функциональная схема устройства.
Устройство содержит объект 1 загрузки, датчик 2 положения, первый коммутатор 3, блок 4 определения координат, блок 5 памяти, схему 6 вычитания, цифроаналоговый преобразователь 7, нуль-орган 8, блок 9 исполнительных двигателей, платформу 10, датчик 11 исходного состояния, балочный держатель 12 с замком, блок 13 питания, второй коммутатор 14, электроприводы 15 подъемного устройства, датчик-ограничитель 16, подъемное устройство 17, платформу 18 для размещения груза, подвешиваемое изделие (груз) 19, датчик 20 подвески.
Устройство работает следующим образом. Объект загрузки 1 заезжает на подвижную платформу 10. При этом объект загрузки 1 механически воздействует своей тяжестью на датчик 2 положения, расположенный на платформе 10, сигнал с него поступает на первый управляющий вход коммутатора 3, при этом напряжение с блока 13 питания подается на вход блока 4 определения координат для запуска его работы и на первый вход блока 5 памяти для считывания координат эталонного положения объекта загрузки 1 для осуществления операции подвески. Координаты фактического положения объекта загрузки 1 с блока 4 определения координат (с 1-4 выхода) поступают на 1-4 входы схемы 6 вычитания, на 5-8 входы схемы вычитания с 1-4 выходов блока 5 памяти поступают координаты эталонного положения. Схема 6 вычитания сравнивает координаты истинного положения объекта с координатами эталонного положения и формирует ошибки рассогласования, которые с 1-4 выходов схемы 6 вычитания поступают на 1-4 входы цифроаналогового преобразователя 7, где кодовые значения ошибки рассогласования преобразуются в аналоговые сигналы. С 1-4 выходов цифроаналогового преобразователя 7 они поступают на блок 9 исполнительных двигателей платформы 10, которые обрабатывают ошибку и устанавливают подвижную платформу 10 с объектом загрузки 1 в положение, в котором реализуется процесс подвески. Одновременно с 1-4 выходов схемы 6 вычитания кодовые значения ошибок рассогласования поступают на 1-4 входы нуль-органа 8. При достижении ими нулевых значений с выхода нуль-органа 8 выдается сигнал, который, поступая на первый вход коммутатора 14, подключает напряжение с блока 13 питания к электроприводам 15 подъемного устройства. При этом платформа 18 поднимает изделие 19 под балочный держатель 12 и при срабатывании замка сигнал с датчика подвески 20, расположенного на платформе 18, поступает на коммутатор 14. При этом с блока 13 питания на электроприводы 15 подъемного устройства 17 поступает напряжение обратной полярности и оно отрабатывает опускание платформы 18. Это перемещение осуществляется до механического воздействия последнего на датчик-ограничитель 16. Как только платформа 18 достигнет своего крайнего положения, сигнал с датчика-ограничителя 16 поступает на третий вход коммутатора 14, отключая при этом подачу питающего напряжения на электроприводы 15 подъемного устройства, одновременно сигнал поступает на третий вход коммутатора 3, подключая напряжение с блока 13 питания к соответствующему входу блока 5 памяти. При этом из блока 5 памяти происходит считывание информации о начальном (эталонном) положении подвижной платформы 10, которая после преобразования из кода в аналоговое напряжение возвращает платформу 10 в исходное состояние. После обработки подвижной платформы 10, требуемого перемещения и возвращения ее в исходное положение срабатывает датчик 11 исходного состояния, по которому система возвращается в исходное состояние (в частности, сигнал, поступающий на второй вход коммутатора 3, отключает питающие напряжения от блока 5 памяти) и выдается сигнал "Готовность". Объект загрузки 1 с подвешенным грузом съезжает с платформы 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕНЕРАТОР СЛУЧАЙНЫХ ИМПУЛЬСОВ | 1992 |
|
RU2032986C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ | 1984 |
|
RU2140721C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 1991 |
|
RU2022366C1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| ГЕНЕРАТОР СЛУЧАЙНЫХ ИМПУЛЬСОВ | 1992 |
|
RU2032987C1 |
| УСТРОЙСТВО ТЕЛЕВИЗИОННОГО НАБЛЮДЕНИЯ | 1998 |
|
RU2142676C1 |
| СПОСОБ СНАРЯЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ БОЕПРИПАСАМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2560228C1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1991 |
|
RU2012845C1 |
| БИНАРНЫЙ КВАНТОВАТЕЛЬ С РЕГУЛИРУЕМЫМ ПОРОГОМ | 1993 |
|
RU2065252C1 |
| АВТОНОМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2125237C1 |
Изобретение относится к автоматизации подвески переносимых грузов к объектам, в частности к летательным аппаратам. Целью изобретения является повышение точности доставки грузов. Объект загрузки заезжает на подвижную платформу и механически воздействует на датчик положения, сигнал с которого подается на вход блока определения координат и блока памяти, где координаты эталонного положения объекта загрузки считываются, после чего поступают на схему вычитания, где сравниваются с координатами истинного положения и после преобразования поступают на блок исполнительных двигателей и электроприводы подъемного устройства, управляющие платформой на которой размещается груз. 1 ил.
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВЕСКОЙ ГРУЗОВ НА ОБЪЕКТ, содержащее подвижную платформу для размещения грузов с подъемными блоками, соединенными с электроприводами, подключенными к блоку питания, отличающееся тем, что, с целью повышения точности доставки грузов, в него введены платформа для установки объекта размещения груза с датчиком исходного состояния, блоком исполнительных двигателей и датчиком положения объекта, первый коммутатор, цифроаналоговый преобразователь, схема вычитания, блок определения координат объекта, блок памяти, нуль-орган, второй коммутатор, датчик-ограничитель, датчик подвески, причем выход датчика положения соединен с первым входом первого коммутатора, первый выход коммутатора соединен с первым входом блока памяти, второй выход коммутатора соединен с входом блока определения координат и с вторым входом блока памяти, первый, второй, третий и четвертый выходы блока определения координат соединены соответственно с первым, вторым, третьим и четвертым входами схемы вычитания, первый, второй, третий и четвертый выходы блока памяти соединены соответственно с пятым, шестым, седьмым и восьмым входами схемы вычитания, первый, второй, третий и четвертый выходы схемы вычитания соединены соответственно с первым, вторым, третьим и четвертым входами цифроаналогового преобразователя, а также с первым, вторым, третьим и четвертым входами нуль-органа, первый, второй, третий и четвертый выходы цифроаналогового преобразователя соединены соответственно с первым, вторым, третьим и четвертым входами блока исполнительных двигателей платформы для установки объекта размещения груза, выход датчика исходного состояния соединен с вторым входом первого коммутатора, выход нуль-органа соединен с первым входом второго коммутатора, выходы второго коммутатора соединены с входами электроприводов подъемного устройства, первый и второй выходы блока питания соединены с первым и вторым входами второго коммутатора, выход датчика-ограничителя подъемного блока соединен с третьим входом первого коммутатора и третьим входом второго коммутатора, выход датчика подвески соединен с вторым входом второго коммутатора, выход датчика исходного состояния соединен с сигнализатором готовности, а третий выход блока питания подключен к четвертому входу первого коммутатора, при этом датчик положения механически соединен с платформой для установки объекта размещения груза, а датчик исходного состояния механически соединен с блоком исполнительных двигателей.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Судовое грузоподъемное устройство | 1979 |
|
SU846390A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
