Изобретение относится к фотограмметрии и может быть использовано при создании и обновлении топографических карт.
Известны стереофотограмметрические приборы, в которых отслеживание контуров выполняют с помощью столика с измерительной маркой. К приборам такого типа относится двойной проектор фирмы Матра (Франция) [1] .
Точность ручного перемещения измерительного столика в этих приборах не превышает 0,1 мм, что существенно ограничивает область использования приборов такого типа.
Известен также прибор, в котором управление перемещением пространственной измерительной марки выполняется дистанционно, например, с помощью шара векторного управления электроприводами кареток с фотоснимками. [2] .
Этот прибор содержит узел размещения стереопары фотоснимков, оптическую систему с пространственной измерительной маркой, блок задания координат точек, включающий аналого-цифровые преобразователи, следящие электроприводы и сами органы управления "Шар" и "Цилиндр".
Отслеживание контуров с помощью таких органов управления достаточно удобно, однако при отслеживании протяженных контуров на фотоснимках и при переходе на другой контур необходимо менять положение руки на шаре. В этих случаях оператор временно теряет точное направление отслеживания и выход на точное направление происходит только после того, как начальный участок контура уже отслежен с ошибками.
Целью изобретения является повышение точности аналитического прибора путем исключения ошибок несовмещения пространственной измерительной марки с контуром за счет обеспечения непрерывного указания направления отслеживания протяженных контуров.
Сущность изобретения заключается в том, что в аналитический стереофотограмметрический прибор, содержащий узел размещения стереопары фотоснимков с первой и второй каретками, первый и второй следящие электроприводы перемещения первой каретки по осям абсцисс и ординат соответственно, третий и четвертый следящие электроприводы перемещения второй каретки по осям абсцисс и ординат соответственно, оптическую систему с узлом формирования пространственной измерительной марки, блок задания пространственных координат точек с первым и вторым механическими приводами и тремя угловыми преобразователями, валы первого и второго из которых соединены с осями вращения первого и второго механических приводов соответственно, и блок обработки с регистратором координат точек и узлом управления первым, вторым и третьим следящими электроприводами, причем выход блока обработки соединен с входом четвертого следящего электропривода, а первый механический привод выполнен в виде цилиндра управления, дополнительно введен узел формирования марки-указателя со следящим электроприводом разворота изображения марки-указателя относительно центра пространственной измерительной марки, узел управления первым, вторым и третьим следящими электроприводами выполнен в виде синусного и косинусного преобразователей, первого и второго блоков умножения с выходными регистрами, и сумматора с выходным регистром, а блок задания пространственных координат точек выполнен с третьим механическим приводом, выход которого соединен с входом третьего углового преобразователя, причем выход первого углового преобразователя соединен с первым выходом сумматора, выходной регистр которого соединен с входом третьего следящего электропривода и первого входа блока обработки, выход второго углового преобразователя последовательно соединен с входом синусного преобразователя, первым входом первого блока умножения и вторым входом блока обработки и последовательно соединен с входом косинусного преобразователя, первым входом второго блока умножения и третьим входом блока обработки, выход третьего углового преобразователя соединен с вторыми входами первого и второго блоков умножения, при этом выходной регистр первого блока умножения соединен с входом второго следящего электропривода, выходной регистр второго входа блока умножения соединен с входом первого следящего электропривода и вторым входом сумматора, выход второго углового преобразователя соединен с входом следящего электропривода разворота изображения марки-указателя, а второй и третий механические приводы выполнены в виде штурвала и педали соответственно.
Совокупность признаков, характеризующих предложенный аналитический стереофотограмметрический прибор, отличает его от известных приборов новыми свойствами, обеспечивающими повышение точности создаваемых оригиналов картографических документов и увеличение производительности прибора. Эти преиму- щества достигаются за счет формирования в поле зрения прибора марки-указателя направления перемещения пространственной измерительной марки при отслеживании контура. Автоматический разворот марки-указателя в зависимости от углового поворота датчика, связанного с основной ручкой управления прибором, дает оператору необходимую информацию о текущем векторе направления смещения пространственной измерительной марки. В предлагаемом приборе предусмотрена возможность регулировки скорости отслеживания контура в зависимости от его сложности, что увеличивает производительность отслеживания контуров при сохранении заданной точности. Эта точность обеспечивается как в динамике, так и при работе прибора в старт-стопном режиме.
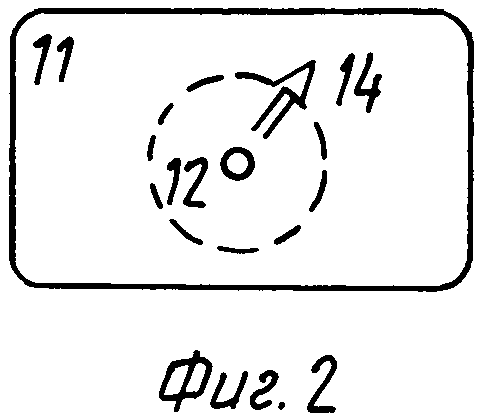
На фиг. 1 представлена принципиальная схема аналитического стереофотограмметрического прибора; на фиг. 2 - возможный вариант исполнения пространственной измерительной марки и марки-указателя.
Аналитический стереофотограмметрический прибор содержит узел размещения стереопары фотоснимков с первой 1 и второй 1а каретками, следящие электроприводы 2-2в перемещения кареток 1 и 1а по осям абсцисс и ординат, оптическую систему с зеркалами 3, объективами 4, поляроидами 5, зеркалом 6, полупрозрачным зеркалом 7, объективом 8, зеркалом 9, выполненным полупрозрачным, зеркалом 10, экраном 11, узлом формирования пространственной измерительной марки 12 (фиг. 2), выполненной гравировкой на экране 11 (фиг. 1 и 2), узлом формирования марки-указателя, включающим: непрозрачную пластину 13 (фиг. 1) с маркой-указателем 14 (фиг. 2), выполненной прозрачной, осветителем 15 (фиг. 1), марки-указателя 14, блок разворота марки-указателя, включающий: призму 16 (Пехана), редуктор 17 и следящий электропривод 18 разворота изображения марки-указателя 14( фиг. 2) относительно цент- ральной точки пространственной измерительной марки 12, узел управления (фиг. 1) с первым 2, вторым 2а и третьим 2б следящими электроприводами, блок задания пространственных координат точек, содер- жащий штурвал 19 с угловым аналого-цифровым преобразователем 20, и цилиндр 21 с угловым аналого-цифровым преобразователем 22 и педаль 23 с аналого-цифровым преобразователем 24, блок обработки с узлом управления первым 2, вторым 2а и третьим 2б электроприводами, включающий синусный преобразователь 25, косинусный преобразователь 26, первый 27 и второй 27а блоки умножения с выходными регистрами 28 и 28а и сумматор 29, снабженный выходным регистром 30, и вычислительным блоком 31 фотограмметрической обработки информации, поступающей с выходных регистров 28, 28а и 30 прибора, с регистратором координат 32 и интерфейсом 33 ввода вывода информации.
Выход углового аналого-цифрового преобразователя 20 прибора соединен с входами следящего электропривода 18, синусного преобразователя 25 и косинусного преобразователя 26.
Выход аналого-цифрового преобразователя 24 соединен с вторыми входами первого 27 и второго 27а блоков умножения, первые входы которых соединены соответственно с выходами синусного 25 и косинусного 26 преобразователей сигнала, поступающего с аналого-цифрового преобразователя 24.
Аналитический стереофотограмметрический прибор работает следующим образом. Изображения фотоснимков, распо- ложенных на каретках 1 и 1а, проецируются объективами 4 через зеркала 3, поляроиды 5, полупрозрачное зеркало 7, объектив 8, зеркало 9, полупрозрачное зеркало 10 на экран 11. Зеркало 6 направляет изображение фотоснимка, расположенного на левой каретке 1 к полупрозрачному зеркалу 7.
Изображения фотоснимков на экране 11 оператор рассматривает через очки с поляризационными фильтрами. Очки на приведенных в описании чертежах не пока- заны.
При рассматривании изображений фотоснимков на экране 11 оператор наблюдает стереоскопическую модель, после взаимного ориентирования стереопары фотоснимков местности. С этой стереоскопической моделью местности оператор может совместить измерительную марку путем изменения положения кареток 1 и 1а прибора. Для этой цели он должен пользоваться штурвалом 19, цилиндром 21 и педалью 23.
Повороты штурвала 19 приводят к формированию цифрового сигнала на выходе аналого-цифрового преобразователя 20. Этот сигнал пропорционален углу поворота штурвала 19 и поступает одновременно на первый вход синусного преобразователя 25, первый вход косинусного преобразователя 26 и на вход следящего электропривода 18, который через редуктор 17 осуществляет разворот призмы 16. Редуктор 17 предназначен для согласования углов поворота штурвала 19 и марки-указателя 14 (фиг. 2) с учетом удвоенной скорости разворота изображений призмой 16 (Пехана).
При поворотах штурвала 19 оператор будет наблюдать развороты изображения марки-указателя 14 вокруг центра измерительной марки 12 в пространстве стереоскопической модели местности.
Измерительная марка 12 в этом пространстве сохранит свое положение при поворотах штурвала 19 (фиг. 1), если не нажата педаль 23 и оператор не вращает цилиндр 21, хотя на выходах синусного и косинусного преобразователей 25, 26 автоматически формируются сигналы, пропорциональные соответственно синусу и косинусу угла поворота штурвала 19.
При нажатии на педаль связанный с ней аналого-цифровой преобразователь 24 формирует на вторых входах блоков умножения 27 и 27а сигнал, пропорциональный желаемой скорости измерительной марки по стереомодели местности 7. В выходных регистрах 28 и 28а блоков умножения 27, 27а при нажатой педали 24 формируются сигналы, пропорциональные приращениям координат и первой каретки 1 прибора.
Следящие электроприводы 2 и 2а этой каретки смещают ее в соответствии с сигналами на выходах регистров 28, 28а блоков умножения 27, 27а. Кроме входа следящего электропривода 2 сигнал, пропорциональный смещению первой каретки 1 прибора, поступает на второй вход сумматора 29, который с учетом разворота оператором цилиндра 21 формирует в выходном регистре 30 сигнал, пропорциональный смещению второй каретки 1а прибора по направлению оси абсцисс.
Разворотами цилиндра 21 оператор может устранять несовмещения измерительной марки прибора со стереомоделью в точке наблюдения
При работе аналитического стереофотограмметрического прибора сигналы с выходных регистров 28 и 28а блоков умножения 27 и 27а и выходного регистра 30 сумматора 29 поступают не только на входы первого 2, второго 2а и третьего 2б следящих электроприводов, но и на входы вычислительного блока 31 фотограмметрической обработки информации, снабженного регистратором координат 32 и интерфейсом 33 ввода-вывода информации о стереомодели местности, например для ее графического отображения на каких-либо периферийных устройствах.
В вычислительном блоке 31 фотограмметрической обработки информации по априорно известным элементам взаимного ориентирования фотоснимков стереопары определяется ордината точки второго фотоснимка, свободная от поперечного параллакса.
Вычисления в этом блоке 31 выполняются по известным из технической литературы формулам [1, 2] :
y′=  (1) где Y1' = b1(x - x0) + b2(y - y0) + b3f,
(1) где Y1' = b1(x - x0) + b2(y - y0) + b3f,
Z1' = c1(x - x0) + c2(y - y0) - с3f, (2)
x, y, x' и y' - прямоугольные координаты точек первого и второго фотоснимков стереопары,
f, x0 и y0 - фокусное расстояние и координаты главных точек фотоснимков стереопары,
b1, b2. . . С
B
С
Следящий электропривод 2в перемещений второй каретки 1а прибора по направлению оси ординат смещает эту каретку в соответствии с зависимостью (1) и тем самым устраняются поперечные двоения точек стереомодели местности в поле зрения оптической системы.
Синусный и косинусный преобразователи, блоки умножения, сумматор и вычислительный блок фотограмметрической обработки информации содержит лишь электронные компоненты и поэтому могут быть реализованы в виде большой интегральной схемы, позволяющей выполнять параллельные вычисления, или микро-ЭВМ, обеспечивающей последовательную цифровую обработку сигналов, поступающих с аналого-цифровых преобразователей, и последовательное формирование сигналов управления следящими электроприводами.
Предлагаемый аналитический стереофотограмметрический прибор позволяет отслеживать как рельеф, так и контурные линии объектов местности. При отслеживании контуров размещают фотоснимки стереопары на каретках прибора, ориентируют их по шести стандартно расположенным точкам, например, с помощью стандартной ЭВМ, подключенной к интерфейсу ввода-вывода информации. Эти данные вводятся в вычислительный блок фотограмметрической обработки информации прибора, в котором формируются сигналы управления следящими электроприводами кареток. После того, как в ходе взаимного ориентирования будут устранены поперечные двоения изображений штурвалом, можно развернуть изображение марки-указателя по направлению текущего вектора отслеживаемого контура и начать его отслеживание.
Перемещение измерительной марки будет совпадать с отслеживаемым и контуром и оператору не надо начинать этот процесс с выбора направления движения марки методом проб. В зависимости от индивидуальных особенностей оператора он по своему желанию может регулировать скорость отслеживания контура, в зависимости от сложности рельефа и отслеживаемого контура. Это позволяет выбирать оптимальные режимы обработки стереопары фотоснимков как по точности, так и по производительности выполнения работ.
Указанные особенности аналитического стереофотограмметрического прибора повышают точность создаваемых с помощью этого прибор топографических карт и снижают удельные затраты на выполнение этого вида работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| Аналитический стереофотограмметрический прибор | 1991 |
|
SU1800267A1 |
| Универсальный стереофотограмметрический прибор | 1976 |
|
SU567955A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АЭРОФОТОСЪЕМКОЙ | 1997 |
|
RU2138780C1 |
| Автоматический стереофотограмметрический прибор | 1976 |
|
SU555285A1 |
| Способ стереоскопического измерения координат точек фотоснимков | 1975 |
|
SU551504A1 |
| Фотограмметрический прибор | 1982 |
|
SU1064134A1 |
| Способ стереоскопического определения координат точек фотоснимков | 1990 |
|
SU1800265A1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| ВСЕНАПРАВЛЕННЫЙ РАДИОПЕЛЕНГАТОР | 1996 |
|
RU2126978C1 |
Использование: в фотограмметрии, при создании и обновлении топографических карт. Сущность изобретения: прибор содержит первую (1) и вторую (1а) каретки узла размещения стереопары фотоснимков, первый (2) и второй (2а) следящие электроприводы перемещения первой каретки (1) по осям абсцисс и ординат, третий (2б) и четвертый (2в) следящие электроприводы перемещения второй каретки (1а) по осям абсцисс и ординат, узел формирования пространственной измерительной марки (12), узел формирования марки-указателя (14) со следящим электроприводом (18) разворота ее изображения относительно центра измерительной марки (12), блок задания пространственных координат точек с первым (12), вторым (19) и третьим механическими приводами и первым (22), вторым (20) и третьим (24) угловыми преобразователями, блок обработки (31) с регистратором координат точек (32) и узлом управления первым (2), вторым (2а) и третьим (2б) следящими электроприводами, выполненным в виде синусного (25) и косинусного (26) преобразователей, первого (27) и второго (27а) блоков умножения с выходными регистрами (28, 28а) и сумматора (29) с выходным регистром (30). Первый механический привод (21) выполнен в виде цилиндра управления, ось вращения которого соединена с валом первого углового преобразователя (22). Второй механический привод (19) выполнен в виде штурвала управления, ось вращения которого соединена с валом второго углового преобразователя (20). Третий механический привод (23) выполнен в виде педали управления. 20-26-27а-28а-29-30-31-2в, 20-25-27-28-31-32, 23-24-27, 20-18, 28-2а, 24-27а, 28а-2, 22-29, 30-2б, 28а-31. 2 ил.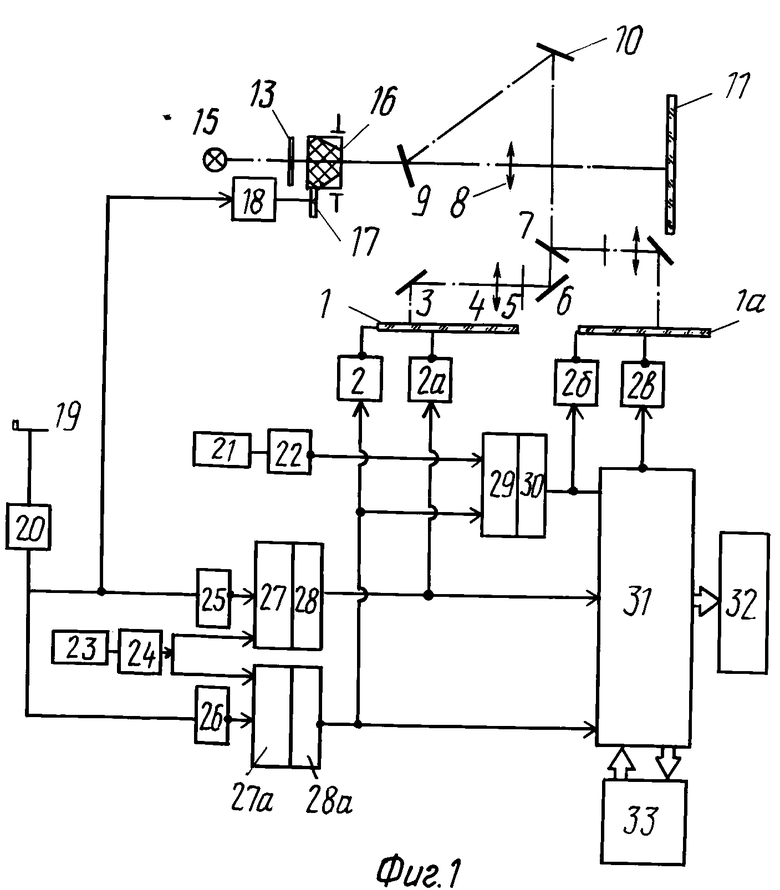
АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР, содержащий узел размещения стереопары фотоснимков с первой и второй каретками, первый и второй следящие электроприводы перемещения первой каретки по осям абсцисс и ординат соответственно, третий и четвертый следящие электроприводы перемещения второй каретки по осям абсцисс и ординат соответственно, оптическую систему с узлом формирования пространственной измерительной марки, блок задания пространственных координат точек с первым и вторым механическими приводами и тремя угловыми преобразователями, валы первого и второго из которых соединены с осями вращения первого и второго механических приводов соответственно, и блок обработки с регистратором координат точек и узлом управления первым, вторым и третьим следящими электроприводами, причем выход блока обработки соединен с входом четвертого следящего электропривода, а первый механический привод выполнен в виде цилиндра управления, отличающийся тем, что, с целью повышения точности, в него дополнительно введен узел формирования марки-указателя со следящим электроприводом разворота изображения марки-указателя относительно центра пространственной измерительной марки, узел управления первым, вторым и третьим следящими электроприводами выполнен в виде синусного и косинусного преобразователей, первого и второго блоков умножения с выходными регистрами и сумматора с выходным регистром, а блок задания пространственных координат точек выполнен с третьим механическим приводом, выход которого соединен с входом третьего углового преобразователя, причем выход первого углового преобразователя соединен с первым входом сумматора, выходной регистр которого соединен с входами третьего следящего электропривода и первого входа блока обработки, выход второго углового преобразователя последовательно соединен с входом синусного преобразователя, первым входом первого блока умножения и вторым входом блока обработки и последовательно соединен с входом косинусного преобразователя, первым входом второго блока умножения и третьим входом блока обработки, выход третьего углового преобразователя соединен с вторыми входами первого и второго блоков умножения, при этом выходной регистр первого блока умножения соединен с входом второго следящего электропривода, выходной регистр второго блока умножения соединен с входом первого следящего электропривода и вторым входом сумматора, выход второго углового преобразователя соединен с входом следящего электропривода разворота изображения марки-указателя, а второй и третий механические приводы выполнены в виде штурвала и педали управления соответственно.
