Изобретение относится к измерительно-преобразовательной технике, а именно к индукционным датчикам угла, выходное напряжение которых изменяется по требуемому закону при повороте ротора, и может найти применение в качестве первичных датчиков информации в аналоговых и дискретных системах.
Известен индукционный датчик со сосредоточенными обмотками [1].
Недостатком датчика является расположение обмоток на роторе, что снижает надежность и срок службы датчика.
Наиболее близким к изобретению является индукционный бесконтактный датчик, содержащий ферромагнитный статор с пазами на его внутренней поверхности, и двухполюсный ферромагнитный ротор. При этом входная и выходная обмотки расположены каждая в диаметрально размещенных пазах [2].
Недостатком датчика является реализация только одного закона изменения выходного напряжения.
Изобретениe решает задачу положения различных законов изменения выходного напряжения датчика.
Задача решается выбором ширины полюсной дуги ротора и размещением пазов выходной обмотки с угловым смещением относительно пазов обмотки возбуждения.
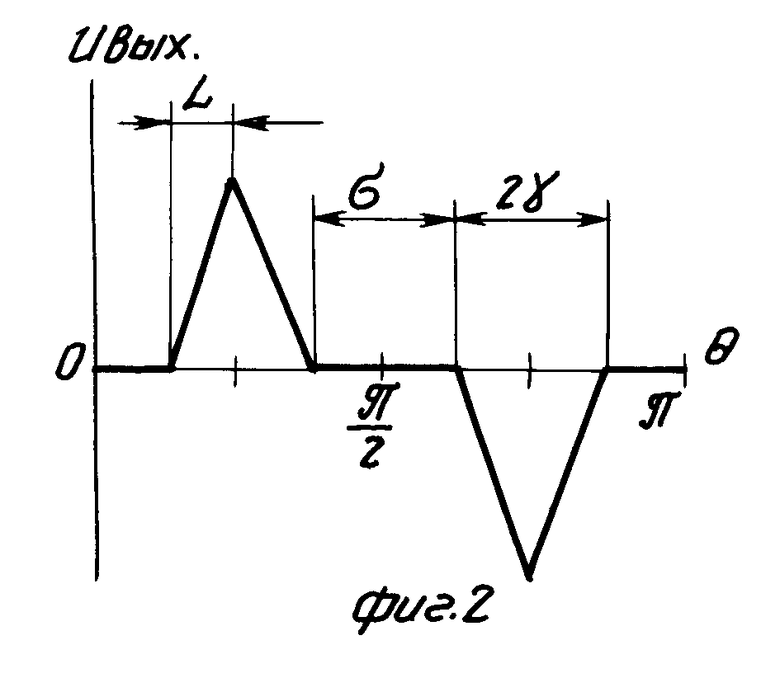
На фиг.1 представлена схема расположения ферромагнитных статора и ротора, а также электрических обмоток; на фиг.2-4 - выходные характеристики при повороте ротора для различных углов смещения пазов выходной обмотки ( γ) и различной полюсной дуги ротора (Т): фиг.2 - для T =  , γ <
, γ <  ; L=γ ;σ= 0,5(π-γ) фиг.3 - для T >
; L=γ ;σ= 0,5(π-γ) фиг.3 - для T >  , γ = 2L+β ; L = 0,5(π-T); β= T-
, γ = 2L+β ; L = 0,5(π-T); β= T-  . фиг.4 - для T =
. фиг.4 - для T =  , γ =
, γ =  ; L =
; L = 
На фиг. 1-4 обозначено: Т - ширина полюсной дуги, γ - угловое смещение пазов выходной обмотки относительно диаметрально расположенных пазов с обмоткой возбуждения, σ - зона нечувствительности, β- плоский горизонтальный участок, L - линейный участок.
Датчик содержит ферромагнитный статор 1 с пазами 3-5 и 3I -5I на его внутренней поверхности. В диаметрально расположенных пазах 3,3Iразмещена обмотка возбуждения 6, а в других пазах 4, 5 и 4I ,5I - выходная обмотка 7, 7I . Двухполюсный ферромагнитный ротор 2 имеет длину полюсной дуги Т.
При подключении обмотки возбуждения 6 к источнику переменного напряжения (не показан) функция распределения магнитной индукции, а следовательно, и выходного напряжения Uвых зависит от угла Θ поворота ротора и определяется также конструктивными параметрами Т,γ.
Предлагаемый датчик обладает более широкими функциональными возможностями благодаря изменению вида его выходной характеристики в функции угла поворота ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК УГЛА ПОВОРОТА | 1991 |
|
RU2029230C1 |
| ТРАНСФОРМАТОРНЫЙ ИЗМЕРИТЕЛЬ РАССОГЛАСОВАНИЯ ДЛЯ СЛЕДЯЩИХ СИСТЕМ | 1991 |
|
RU2028708C1 |
| Бесконтактный индукционный датчик | 1957 |
|
SU115683A2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ МЕХАНИЧЕСКОГО ДВИЖЕНИЯ | 1989 |
|
RU2079957C1 |
| Двухотсчетный индукционный датчик угла | 1988 |
|
SU1497689A1 |
| Электромашинный кольцевой датчик угла | 1989 |
|
SU1742948A1 |
| Вентильный электродвигатель | 1988 |
|
SU1515274A1 |
| УПРАВЛЯЕМЫЕ ПОЛЯРИЗАЦИОННЫЕ ОЧКИ | 1991 |
|
RU2029328C1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2097587C1 |
| Индукционный бесконтактный датчик угла | 1976 |
|
SU587318A1 |



Изобретение относится к измерительной технике и имеет целью расширение функциональных возможностей индукционного бесконтактного датчика угла поворота за счет изменения вида его выходной характеристики. Датчик содержит ферромагнитный статор с пазами на его внутренней поверхности и двухполюсный ферромагнитный ротор с длиной полюсной дуги T. В диаметрально расположенной паре пазов статора размещена обмотка возбуждения, а в парах его других пазов, смещенных относительно них на угол γ выходная обмотка. Изменением угла g и длины полюсной дуги T можно получить выходные характеристики датчика в виде симметричной треугольной, пилообразной с зоной нечувствительности G или трапецеидальной с заданной длиной B плоского горизонтального участка функции угла поворота. 3 з.п. ф-лы, 4 ил.
3. Датчик по п.1, отличающийся тем, что, с целью повышения выходной характеристики в виде пилообразной зависимости с зоной нечувствительности G, полюсная дуга T = π/2 , а угловое смещение γ = 0,5(π/2-G) .
4. Датчик по п.1, отличающийся тем, что, с целью повышения выходной характеристики в виде трапецеидальной зависимости с длиной B плоского горизонтального участка, полюсная дуга T = B + π/2 , а угловое смещение γ = π/2 .
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Индукционный бесконтактный датчик угла | 1976 |
|
SU587318A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
