ff
г1

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2556884C1 |
| Асинхронный двигатель | 1941 |
|
SU64151A1 |
| Асинхронный электродвигатель | 1987 |
|
SU1453536A1 |
| Бесколлекторный синхронизированный электродвигатель постоянного тока | 1968 |
|
SU304892A1 |
| Способ настройки вентильного электродвигателя | 1987 |
|
SU1436213A1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| Асинхронный двухроторный электродвигатель | 1981 |
|
SU1001338A1 |
| Электропривод | 1980 |
|
SU924795A1 |
| РУССКИЙ АВТОМАТИЗИРОВАННЫЙ ПАРАМЕТРИЧЕСКИЙ ЭЛЕКТРОПРИВОД ЯЛОВЕГИ | 2004 |
|
RU2262791C1 |
| СПОСОБ И УСТРОЙСТВО ПУСКА ГАЗОТУРБИННОГО АГРЕГАТА | 2003 |
|
RU2251625C1 |
Изобретение относится к вентильным электродвигателям с синусоидальными токами в секциях многофазной обмотки якоря. Целью изобретения является снижение ударных нагрузок при пуске электродвигателя. Для этого ротор 3 электродвигателя соединен с ротором 13 датчика положения ротора с помощью упругой муфты 14 с упорами 15, 16 и пружиной 17, а нагрузка электродвигателя подсоединяется к ротору датчика. Перед пуском электродвигатель имеет угол опережения, близкий к 90°, что обеспечивает начальный вращающий момент. С увеличением угла закручивания пружины вращающий момент увеличивается. Электродвигатель предназначен для приводов с частыми пусками и большим сроком службы. 4 ил.
f3
I /« 5 ,19 (
/I
31515
Нмобретение относится к электрическим машинам, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией, осуществляемой с помощью полупроводниковых приборов.
Целью изобретения является уменьшение ударных нагрузок при пуске дви- гателяс
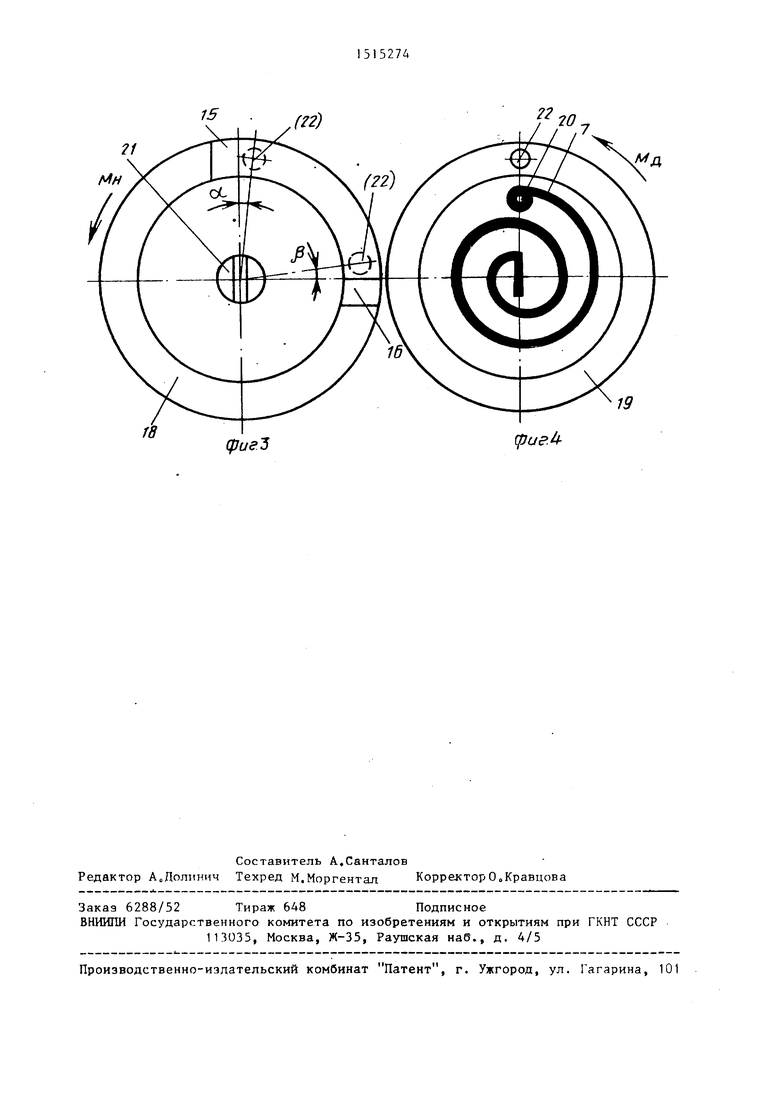
На фиг,1 изображена принципиальная электрическая схема, вентильного двигателя и схема механического соединения роторов датчика положения и собственно двигателя; на фиг,2 - упругая муфта с ограничительными упорами; на фиг,3 - полумуфта, вид изнутри; на фиг. 4- полумуфта с пружиной.
Вентильный электродвигатель со- держит электромеханический преобразователь (ЭМП) 1 с постоянным магнитом 2 на роторе 3 и с обмотками 4 и 5 на статоре, смещенными взаимно на 90 эл. град о и подключенными к вы- ходам фазочувствительных усилителей (ФЧУ) 6 и 7, Датчик положения (ДП) 8 выполнен в виде бесконтактного индукционного датчика, все обмотки которого 9-11 расположен. на статоре, При этом его первичная обмотка 9 подключена к источнику 12 переменного напряжения, а вторичные обмотки 10, 11 - к входам ФЧУ 6 и 7,
Ротор 3 соединен с ротором 13 датчика 8 положения с помощью механической упругой (пружинной) муфты 14, имеющей ограничительные упрры ,15, 16 служащие совместно с пружиной 17 для получения минимального начального пускового момента и для ограничения максимального момента, С помощью пружины 17 осуществляется упругое соединение двух частей 18 и 19 муфты, связанных с роторами 13 и 3, Пружина 17 закреплена одним концом на стержне 20 части 19 муфты 1А, а ; другим концом - в прорези выступа 21 чаоти 18 муфты. На части 19 муфты находится стержень 22, входящий в CO прикосновение с упором 15 или упором 16„ Упоры и стержень выполнены так, чтобы угол закручивания пружины был меньше 90° и обеспечивал создание минимального пускового и максималь- ного допустимого момента. Перед пуском с помощ,ью упора 15 устанавливается исходньп угол, обеспечивающий минимальный нлчальньм момент.
Электродвигатель работает следующим образом.
При подаче входного сигнала упраления от источника переменного напряжения 12 повьппенной частоты ток первичной обмотки 9 ДП наводит в ег вторичных обмотках 10 и II переменные ЭДС, Огибающая этих ЭДС изменяется при повороте рото.ра по законам синуса и косинуса. Эти напряжения подаются на входы ФЧУ 6 и 7, с выхода которых снимаются и подаются на обмотки 4, 5 уже выпрямленные напряжения, изменяющиеся также по законам синуса и косинуса от угла поворота ротора.
Токи обмоток 4, 5 создают постоянный магнитный поток ЭМП, Угол поворота этого потока равен углу поворота ротора ДП, Взаимодействие токов обмоток 4 и 5 с потоком постоянного магнита 2 ротора 3 создает вращающий механический момент, если оси потоков статора и ротора не совпадают,
В момент пуска при неподвижном роторе муфта благодаря упору 15 имеет начальный угол о (фиг,3), что создает пространственный сдвиг осей потоков статора и ротора ЭМП также на угол d., Это обеспечивает минимальный начальный пусковой момент двигателя
. Мп«к М sino , (1) где || К - наибольший момент, развиваемый двигателем.
Если начальный пусковой момент двигателя меньше момента нагрузки, действующего со стороны выходного вала ДП, но больше момента сопротивления пружины муфты, то последняя начинает скручиваться. По мере увеличения угла скручивания начинает расти момент двигателя, которы достигает максимума при повороте до упора 16 на угол 90° - /5, где /1 - угол установки стержня 22 и упора 16, При этом максимальный момент двигателя равен
MI M sin ( ) М„ cos А .
(2
В результате диапазон изменения момента предлагаемого двигателя ра- веи
йМ Мд, (sina(- cos ft),
а отношение моментов
KV
5151
M,,yck sin 0/ Ня cos /3
Если 0 12° H , получим (ilM 0,2 M,, и К,,2. Тогда для из- вестного нерегулируемого двигателя , и 4К 0, а К. 1.
Применение упругой муфты с упорами обеспечивает более плавный пуск и разгон двигателя. Благодаря отсутствию ударных нагрузок при пуске увеличивается срок службы приводимых в действие двигателем объектов и качество осуществляемых ими производственных процессов.
Формула изобретения
Вентильный электродвигатель, . содержащий ротор с постоянным магнитом, устройство для подсоединения на
Ми
Л/7
6
грузки и статор с обмотками, подключенными к выходам фазочувствительных усилителей, входы которых соединены с расположенными на статоре вторичными обмотками датчика положения ротора, ротор которого механически связан с ротором двигателя, а первичная рбмотка датчика положения подключена к источнику переменного напряжения повышенной частоты, отличающийся тем, что, с целью уменьшения ударных нагрузок при пуске электродвигателя, злектродвигaтJ ль снабжен упругой механической муфтой, роторы датчика положения и электродвигателя соединены с помощью упругой механической муфты, выполненной с двумя внутренними ограничительными упорами, а устройство для подсоединения нагрузки установлено на роторе датчика полокення.
A/J
2i
фиг 2
71
CfJua S
19
(ригЛ
| Патент США № 3667018, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| ПУЛЬСНЫЙ УСКОРИТЕЛЬ ПРЯМОГО ДЕЙСТВИЯ | 0 |
|
SU303946A1 |
