Изобретение относится к гидроакустическим измерениям, а конкретнее к способам измерения рассеяния звука дном океана.
Свойство рассеяния акустических волн дном океана в функции угла θ в вертикальной плоскости принято характеризовать коэффициентом рассеяния m(θ), который определяет отношение звуковой мощности W, рассеиваемой единичной площадкой поверхности дна в единицу телесного угла в данном направлении θ, к интенсивности I падающей на эту площадку первичной волны
m(θ)  .
.
Коэффициент рассеяния m(θ) меняется в весьма широких пределах в зависимости от характера дна океана, частоты и угла падения θ первичной волны на рассеивающую границу раздела (Житковский Ю.Ю. Рассеяние звука дном океана. В кн. Акустика океана. Современное состояние М. Наука, 1982, с. 157). Данные о коэффициенте рассеяния m(θ) необходимы для оценки уровня данной реверберации. Кроме того, рассеянные дном сигналы несут информацию о его характеристиках, в частности о неоднородности дна и его структуре. Все известные в настоящее время способы определения коэффициента донного рассеяния m(θ) основаны на излучении акустической энергии в направлении дна моря и приеме отражений, обычно в локационном направлении.
Известен способ измерения рассеяния звука дном, основанный на излучении звука с помощью взрыва небольшого заряда и приеме отраженного звука ненаправленным приемником, располагаемым в непосредственной близости от точки подрыва. Этим способом получен практически весь массив данных по изучению рассеяния звука дном океана (Житковский Ю.Ю. Рассеяние звука дном океана. В кн. Акустика океана. Современное состояние. М. Наука, 1982, с. 158). Угол падения в этом способе определяют по времени, прошедшему после излучения звука (после взрыва заряда).
Недостатком этого способа является необходимость производить взрывы, которые экологически вредны и, кроме того, демаскируют проводимые измерения.
Наиболее близким по технической сущности к предложенному является способ измерения рассеяния звука дном океана, включающий определение степени отражения от дна океана путем излучения акустического импульса (или взрыва) и приема рассеянного звука с помощью направленного приемника с регулируемым наклоном характеристики направленности. Угол скольжения звукового луча при падении его на дно равен в этом случае углу наклона характеристики направленности с поправкой (при необходимости) на искривление лучей из-за рефракции (Урик Р.Д. Основы гидроакустики. Л. Судостроение, 1978, с. 284).
Недостатками этого способа так же, как и ранее рассмотренного, являются демаскировка измерений и отрицательное влияние на экологию.
Задачей настоящего изобретения является определение коэффициента данного рассеяния без использования искусственного акустического излучения.
Для решения поставленной задачи в способ, основанный на направленном приеме акустического поля с движущегося подводного аппарата и оценке коэффициента отражения звука от дна моря, введены следующие новые признаки:
в качестве акустического поля используют динамический шум моря при волнениях не менее двух баллов, который фиксируют с помощью четырехканального приемного тракта, имеющего характеристики направленности каждого из каналов R1+  θ
θ  ; R1-
; R1-  θ
θ  ; R2+
; R2+  θ
θ  ; R2-
; R2-  θ
θ  ;
;
принятый динамический шум преобразуют на выходах четырех приемных каналов в энергетические спектры G1+  f
f  ; G1-
; G1-  f
f  G2+
G2+  f
f  ; G2-
; G2-  f
f  ;
;
главные максимумы характеристик направленности R1+  θ
θ  и R2+
и R2+  θ
θ  ориентируют под углом + θо к горизонту а R1-
ориентируют под углом + θо к горизонту а R1-  θ
θ  и R2-
и R2-  θ
θ  под углом θо к горизонту;
под углом θо к горизонту;
растворы характеристик направленности R1+  θ
θ  , R2+
, R2+  θ
θ  , R2-
, R2-  θ
θ  формируют соответственно попарно одинаковыми и углы θо выбирают из равенства
формируют соответственно попарно одинаковыми и углы θо выбирают из равенства ≥ + θo> arccos
≥ + θo> arccos
 ≅ -θo< -arccos
≅ -θo< -arccos где Со, Сп, Сд соответственно скорость звука на горизонте расположения приемной антенны, у поверхности и у дна океана;
где Со, Сп, Сд соответственно скорость звука на горизонте расположения приемной антенны, у поверхности и у дна океана;
предварительно определяют энергетические спектры собственных шумов движущегося подводного аппарата при той же скорости его движения, что и при измерении коэффициента рассеяния на выходах тех же четырех приемных каналов:
G1+, k  f
f  ; G1-, k
; G1-, k  f
f  ; G2+, k
; G2+, k  f
f  ; G2-, k
; G2-, k  f
f 
затем определяют коэффициент рассеяния звука дном океана в соответствии с формулой
m ,f
,f
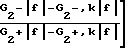 ×
×
×  R
R f
f -R
-R f
f sinθd
sinθd exp[2β1(Do-2D1)] где Δ θ θ2 θ1 раствор главного максимума характеристики направленности;
exp[2β1(Do-2D1)] где Δ θ θ2 θ1 раствор главного максимума характеристики направленности;
β1 коэффициент поглощения звука в океанической среде, табулированный для данной акватории;
Dо длина луча между его соседними выходами к поверхности, определяемая по формулам рефракции лучей;
D1 расстояние по лучу до его выхода и поверхности, определяемое по формуле рефракции лучей.
Принятый шум моря по всем четырем каналам может быть усреднен по n реализациям, при этом разница между экспериментально определенными характеристиками направленности должна удовлетворить неравенству: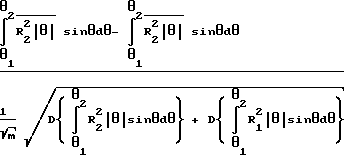

 , (1) где D символ дисперсии;
, (1) где D символ дисперсии;
Zкр определяют из уравнения: Z
Z
 ; где α уровень значимости,
; где α уровень значимости,
Ф Zкр
Zкр функция Лапласа.
функция Лапласа.
Раствор главного максимума более широких характеристик направленности на уровне половинной мощности предпочтительно выбирать из условия
θ ≅ 0,5ctg .
.
Предлагаемый способ определения коэффициента донного рассеяния основан на анализе анизотропии естественного динамического шума моря в вертикальной плоскости.
Использование пространственной фильтрации по четырем направлениям позволяет разрешить коэффициент рассеяния относительно его когерентной составляющей, при этом выбор различия в углах раствора парных характеристик направленности дает возможность избежать влияния неровностей дна при условии, что угол раствора более широких характеристик лежит вне углов рефракционного минимума шумов моря.
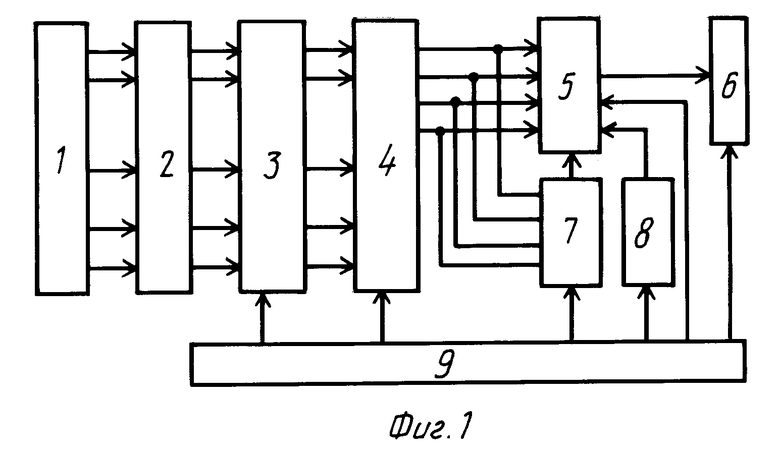
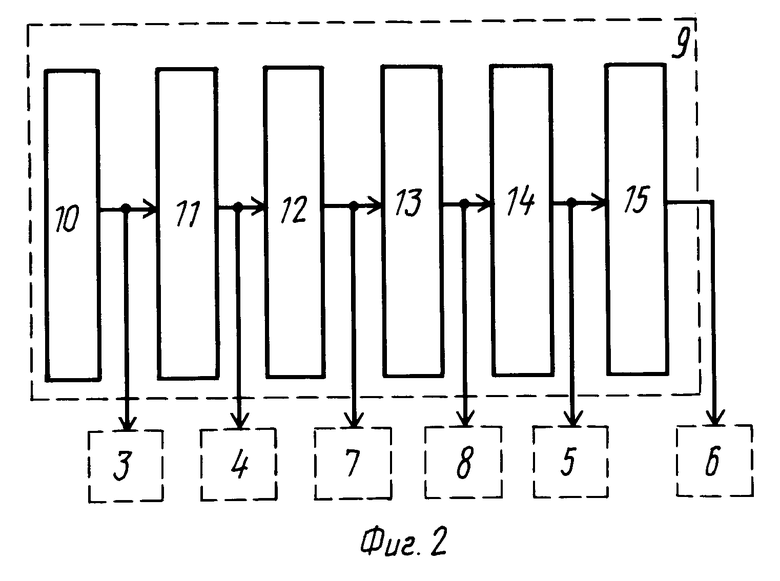
На фиг. 1 приведена блок-схема устройства, реализующего способ; на фиг. 2 блок-схема блока управления устройством.
П р и м е р. На подводном аппарате, передвигающемся на глубине 100 м, осуществлялись эксперименты по определению коэффициента донного рассеяния. Для определения коэффициента донного рассеяния был использован шум моря. Были сформированы четыре характеристики направленности, пространственно фильтрующие шум моря, который соответствовал волнению моря порядка 3 баллов.
Угол ± θо был выбран равным ±35о относительно горизонта (θ90о). Раствор главного максимума по уровню 0,5 по энергии более широких характеристик направленности был выбран из соотношения
Δ1θ 0,5ctg 1,6°, а более узких характеристик направленности R2+ и R2- был выбран, исходя из условия (1) в виде
1,6°, а более узких характеристик направленности R2+ и R2- был выбран, исходя из условия (1) в виде
Δ 2 (θ )=1,2о
Для упрощения выбора Δ 2
 ycловие (1) было приближенно принято в виде
ycловие (1) было приближенно принято в виде
 > Zкр, где К1, К2 соответственно коэффициенты концентрации характеристики направленности R1+, R1- и R2+, R2-
> Zкр, где К1, К2 соответственно коэффициенты концентрации характеристики направленности R1+, R1- и R2+, R2-
Указанное упрощение выражения (1) оказалось возможным только потому, что ореол добавочных максимумов всех характеристик направленности оказался примерно одинаковым и устойчиво повторяющимся от опыта к опыту, т.е. при повторных опытах дисперсия объяснялась в основном разбросом измеряемых главных максимумов. Расчет коэффициента рассеяния звука дном океана определялся тоже по упрощенной формуле
m ,t
,t
 exp[2β1(H-h)sinθo][k1(f)-k
exp[2β1(H-h)sinθo][k1(f)-k f
f ]-1
]-1
Как уже упоминалось, энергетические спектры на выходе приемных трактов G1-  f
f  , G1+
, G1+  f
f  , G2-
, G2-  f
f  и G2+
и G2+  f
f  измерялись при волнении моря порядка 3 баллов. Энергетические спектры G1-, k
измерялись при волнении моря порядка 3 баллов. Энергетические спектры G1-, k  f
f  , G1+, k
, G1+, k  f
f  G2-, k
G2-, k  f
f  и G2+, k
и G2+, k  f
f  , характеризующие помехи работе гидроакустической системе от шумов движения, шумов механизмов и шумов жизнеобитания аппарата, измерялись при волнении моря 1 балл в акватории с илистым дном при глубине моря около 300 м. При усреднении велось накопление по реализациям спектра при работе анализатора в реальном масштабе времени за
, характеризующие помехи работе гидроакустической системе от шумов движения, шумов механизмов и шумов жизнеобитания аппарата, измерялись при волнении моря 1 балл в акватории с илистым дном при глубине моря около 300 м. При усреднении велось накопление по реализациям спектра при работе анализатора в реальном масштабе времени за
Тобщ=50 с.
В результате опыта было найдено на частоте 1 кГц при приведении к полосе 1 Гц значение
m(θо, 1 кГц)=8 ˙10-3
Таким образом, операции предлагаемого способа обеспечили решение задачи изобретения.
Способ реализуется с помощью устройства, блок-схема которого приведена на фиг. 1. Устройство содержит последовательно-параллельно соединенные приемную антенну 1, блок 2 усиления и фильтрации, формирователь 3 четырех характеристик направленности, четырехканальный спектроанализатор 4, вычислитель 5 коэффициента рассеяния акустических волн дном океана, индикатор 6, также содержит блок памяти 7 помех аппарата, первый второй, третий, четвертый входы которого соединены с выходами блока 4, а выход которого соединен с пятым входом вычислителя 5, лучеграф 8, выход которого соединен с шестым входом вычислителя 5, также содержит блок управления 9, первый, второй, третий, четвертый, пятый, шестой синхровыходы которого соединены соответственно с синхровходами блоков 3-8.
Блок управления 9 (фиг. 2) выполнен в виде последовательно соединенных генератора 10 тактовых сигналов, первый 11, второй 12, третьей 13, четвертой 14, пятой 15 линий задержки, выходы которых соединены с синхровходами блоков 3, 4, 7, 8, 5, 6 соответственно. Все цифровые блоки устройства имеют местное управление.
Устройство работает следующим образом.
Приемная антенна 1 принимает шум моря и преобразует его в электрические колебания, которые усиливаются и фильтруются в блоке 2. В блоке 4 формируются согласно условиям способа четыре характеристики направленности. Сигналы по четырем каналам в спектроанализаторе 4 преобразуются в четыре энергетических спектра. Предварительно при малой бальности моря определяют по этим же приемным каналам помехи аппарата и четыре энергетических спектра помех заносят в блок памяти 7. После записи в блок 7 переключатель, находящийся в этом блоке, запирает входы блока 7. После этого информация о шуме моря поступает только на вычислитель 5. Данные вычислений с учетом лучевой картины по данным лучеграфа 8 поступают на индикатор. Блок управления 9 синхронизирует работу устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОБЪЕМНОГО РАССЕЯНИЯ ЗВУКА В ОКЕАНИЧЕСКОЙ СРЕДЕ | 1992 |
|
RU2012070C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ МОРЯ НА ПОГРУЖЕННОМ АППАРАТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2029439C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА ГИДРОАКУСТИЧЕСКОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2047278C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОДВОДНОЙ ШУМНОСТИ КОРАБЛЯ-ЦЕЛИ | 1989 |
|
SU1840512A1 |
| СПОСОБ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1986 |
|
SU1840507A1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| СПОСОБ ИЗМЕРЕНИЯ СОБСТВЕННОГО ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ И ШУМОИЗМЕРИТЕЛЬ | 1989 |
|
SU1840603A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В ОКЕАНЕ | 1997 |
|
RU2127890C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
Использование: область гидроакустических измерений. Сущность изобретения: способ определения коэффициента рассеивания акустических волн дном океана основан на направленном приеме акустического поля на движущемся подводном аппарате и на оценке коэффициента отражения звука от дна моря. В качестве акустического поля используют динамический шум моря при волнениях два и более балла. Этот шум пространственно фильтруют с помощью четырехканального приемного тракта. Принятый шум моря одновременно преобразуют на выходах четырех приемных каналов в энергетические спектры, предварительно определяют энергетические спектры собственных шумов приемной антенны подводного аппарата при той скорости его движения, что и при измерении коэффициента рассеяния на выходах тех же четырех приемных каналов, после чего по полученным данным определяют коэффициент рассеяния звука дном океана. 2 з. п. ф-лы, 2 ил.
где Cо, Cп, Cд скорости звука на горизонте расположения приемной антенны, у поверхности и у дна океана соответственно,
предварительно определяют энергетические спектры собственных шумов приемной антенны подводного аппарата при той же скорости его движения, что и при измерении коэффициента рассеяния на выходах тех же четырех приемных каналов G1+,к (f), G1-,к (f), G2+,к (f), G2-,к (f), после чего определяют коэффициент рассеяния звука дном океана в соответствии с формулой
× exp[2β1(Do-2D1)],
где Δθ= θ2-θ1 раствор главного максимума характеристик направленности;
β1 коэффициент поглощения звука в океанической среде, табулированный для данной акватории;
D0 длина луча между его соседними выходами к поверхности, определяемая по формулам рефракции лучей;
D1 расстояние по лучу до его выхода к поверхности, определяемое по формулам рефракции лучей.
где D символ дисперсии,
а Zкр определяют из уравнения
где α уровень значимости;
Ф(Zкр) функции Лапласа.