со
с
Изобретение относится к подъемно- транспортной технике, а именно к грузозахватным системам для гнузоподъемных машин, и может быть использовано в любых отраслях промышленности и транспорта при проведении погрузочно-разгрузочных работ. С наибольшим успехом оно может быть применено при групповой погрузке на суда и Ъыгрузке с судов пакетированных грузов кранами и перегружателями. Кроме того, изобретение может быть применено для группов ой гТерегрузки штучных грузов различной массы и объема.
Известна грузозахватная система, содержащая основание для размещения гру- за, имеющее центр, полую стойку с горизонтальным грузовым кольцом в верхней части полости и захват, включающий штангу со скобой для навешивания на грузоподъемный механизм на верхнем конце и -опорными элементами для взаимодействи- ят с опорным кольцом на нижнем.
К основному недостатку такой перегрузочной платформы Относится низкая надеж- ность, так как имеется возможность соскальзывания пакета при перемещении платформы краном в связи с ее наклоном к горизонтали из-за смещения центра тяжести груза относительно вертикальной оси устройства при несимметричной загрузке платформы пакетами. Уменьшение угла наклона может быть достигнуто путем увеличения расстояния от центра тяжести груженой платформы до точки подвеса захвата к крюку крана. Увеличиниеуказанного расстояния за счет увеличения длины центральной стойки известной перегрузочной платформы приводит к увеличению габарита по высоте, что нежелательно. Увеличение длины захвата с целью увеличения общей высоты подвески платформы к крану не приводит к повышению надежности.
Целью изобретения является повышение надежности за счет уменьшения угла наклона перегрузочной платформы при не- симметричной нагрузке.
Это достигается тем, что грузозахватная система содержит основнаие для размещения груза, имеющее в центре полую стойку с горизонтальным грузовым кольцом в верхней части полости и захват, включающий штангу со скобой для навешивания на грузоподъемный механизм на верхнем конце и опорными элементами для взаимодействия с грузовым кольцом на нижнем, стойка снабжена опорной втулкой, расположенной со смещением по высоте относительно грузового кольца, а штанга выполнена с участком для взаимодействия с опорной втулкой при перекосе основания.
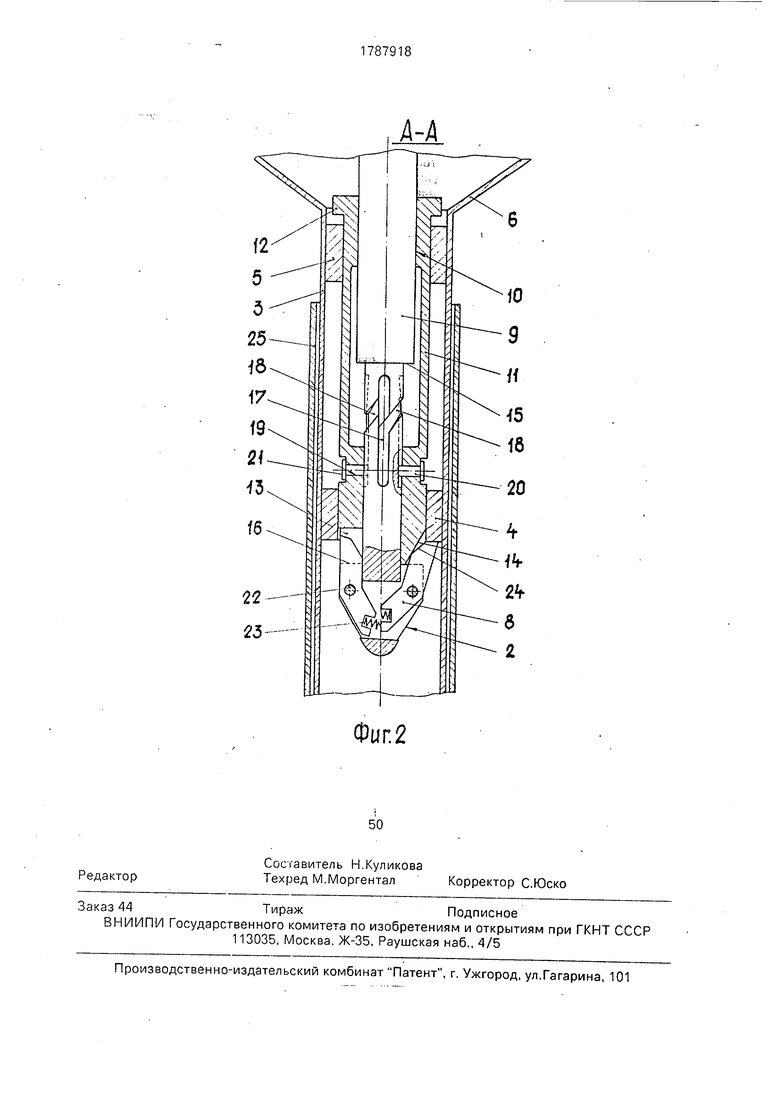
На фиг.1 показан общий вид перегрузочной платформы, разрез; на фиг.2 - разрез А-А на фиг.1 (справа от осевой линии опорный элемент показан в застропленном положении , а слева - в отстропленном положении).
Грузозахватная система включает основание 1 и захват 2. На основании 1 жестко закреплена центральная стойка 3, в верхней части которой установлены горизонтальное грузовое кольцо 4 и опорная втулка 5, расположенная со смещением по высоте относительно кольца 4. В верхней части стойки 3 жестко укреплен конусообразный ловитель 6 для облегчения нацеливания захвата 2 при засторопке. В верхней части захвата 2 укреплена скоба 7 для навешивания на крюк грузоподъемного механизма (не показан) . В нижней части захвата 2 установлены опорные элементы 8 для взаимодействия с грузовым кольцом 4. Захват 2 снабжен штангой 9, содержащей участок 10, который взаимодействует сонорной втулкой 5. На штанге 8 смонтирована втулка 11, выпол- .ненная с буртом 12 в ее верхней части, пазами 13 и скосами 14, расположенными в нижней части. Втулка 11 установлена с возможностью вертикального перемещения относительно штанги 9 под действием собственного веса, ее перемещение ограничено верхним буртом 15 и нижним буртом 16 штанги 9. На штанге 9 выполнены верти кальныепазы 17, между которыми нарезаны винтовые пазы 18. В радиальном отверстии 19 втулки 11 установлен палец 20, одним концом взаимодействующий с кольцеобразной приужиной 21. Второй конец пальца 20 входит в один из вертикальных пазов 17. Опорные элементы 8 выполнены в виде дву- плечих рычагов, шарнирно закрепленных посредством осей 22 на штанге 9. Элементы 8 подключены относительно друг друга пружиной 23. В верхней части элементов 8 выполнены скосы 24 для взаимодействия со скосами 14 втулки 11. На стойке 3 свободно установлена поворротная площадка 25 для размещения на ней пакетов 26.
Используют перегрузочную платформу следующим образом. На площадку 25 загружают пакеты 26, для удобства загрузки площадка 25 может поворачиваться относительно стойки 3. Для застроповки платформы захват 2, навешенный на крюк крана, нацеливают на ловитель 6. При этом опорные элементы 8 находятся в пазах 13 втулки 3, бурт 12 втулки 11 соприкасается с опорной втулкой 5. При дальнейшем опускании захвата 2 втулка 11 остается неподвижной относительно стойки 3, палец 20 перемещается по вертикальному пазу 17,
затем при перемещении его по винтому пазу 18 штанга 9, разворачиваясь относительно втулки 11, доходит до соприкосновения своим бортом 15с втулкой 11, опорные элементы 8 оказываются расположенными на- против скоса 14 втулки 11. После этого поднимают захват 2. Палец 20 перемещается по вертикальному позу 17, опорные элементы 8 своими скосами 24 скользят по скосам 14 втулки 11, раскрываются, обеспе- чивая строповку за грузовое кольцо 4. Платформу поднимают краном, перемещают ее к месту загрузки пакетов 26 и устанавливают на опорную поверхность. Для этстропов- ки платформы захват 2 продолжают опускать, палец 20 перемещается по вертикальному пазу 17, затем при перемещении егб по винтому пазу 18 штанга 9 разворачиваясь относительно втулки 11, доходит до соприкосновения буртом 15 с етулкой 11. Опорные элементы 8, развернутые пружиной 23 вокруг осей 22, оказываются расположенными напротив пазов 13 втулки 11, платформа отстроплена, захват 2 поднимают краном до выхода его за пределы лови- теля 6. Кран с навешенным на его крюк захватом 2 готов к застройке и перемещению следующей груженой или порожней перегрузочной платформе.
Грузозахватная система надежна в рабо- те, так как за счет увеличения длины захвата
и тем самым общей высоты платформы до точки подвеса к крану, а также защемления захвата со стойкой уменьшается угол наклона при ее несимметричной загрузке. При этом повышается безопасность перегрузочных работ, Кроме того, появляется возможность реализовать повышенные ускорения и скорости перемещения платформы, что приводит к увеличению интенсивности грузовых работ.
Формула изобретения
Грузозахватная система, содержащая основание для размещения груза, имеющее в центре полую стойку с горизонтальным грузовым кольцом в верхней части полости, и захват, включающий штангу со скобой для навешивания на грузоподъемный механизм на верхнем конце и опорными элементами для взаимодействия с грузовым кольцом на нижнем, отличающаяся тем, что, с целью повышения надежности при несимметричной нагрузке, полая стойка снабжена расположенной внутри стойки опорной втулкой, расположенной со смещением по высоте относительно грузового кольца, а штанга выполнена с участком для взаимодействия с опорной втулкой при перекосе основания.
Фиг. 2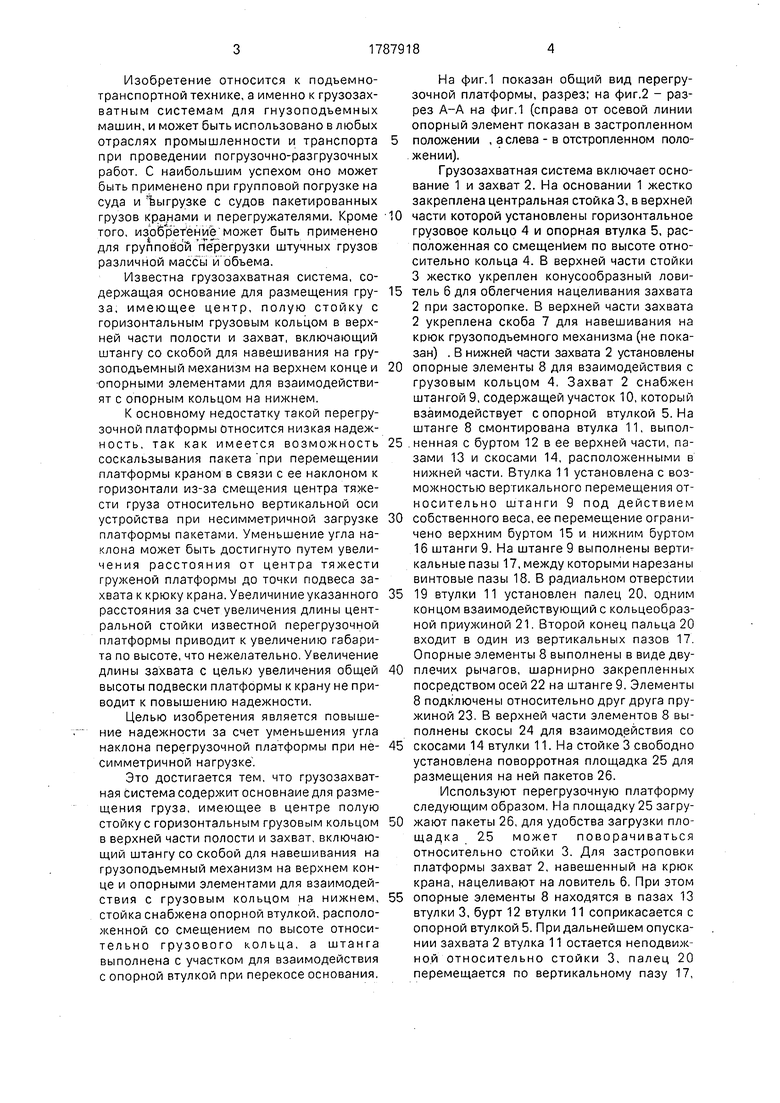
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Грузоподъемная траверса | 1982 |
|
SU1079587A1 |
| Автоматический клещевой захват | 1980 |
|
SU925838A1 |
| Ограничитель угла наклона грузозахватного органа | 1983 |
|
SU1142422A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2010 |
|
RU2453491C1 |
Изобретение относится к подьемнотранспортной технике, а именно к грузозах/ ватным устройствам для кранов. Цель изобретения - повышение надежности при несимметричной нагрузке, Сущность изобретения: грузозахватная система включает основание (1) для установки пакетов, снабженное центральной стойкой (3), и навешиваемый на крюк крана захват(2).Централь - ная стойка (3) снабжена грузовым кольцом (4) и опорной втул кой (5) для взаимодействия с опорными элементами (8) и штангой (9) захвата.2 ил.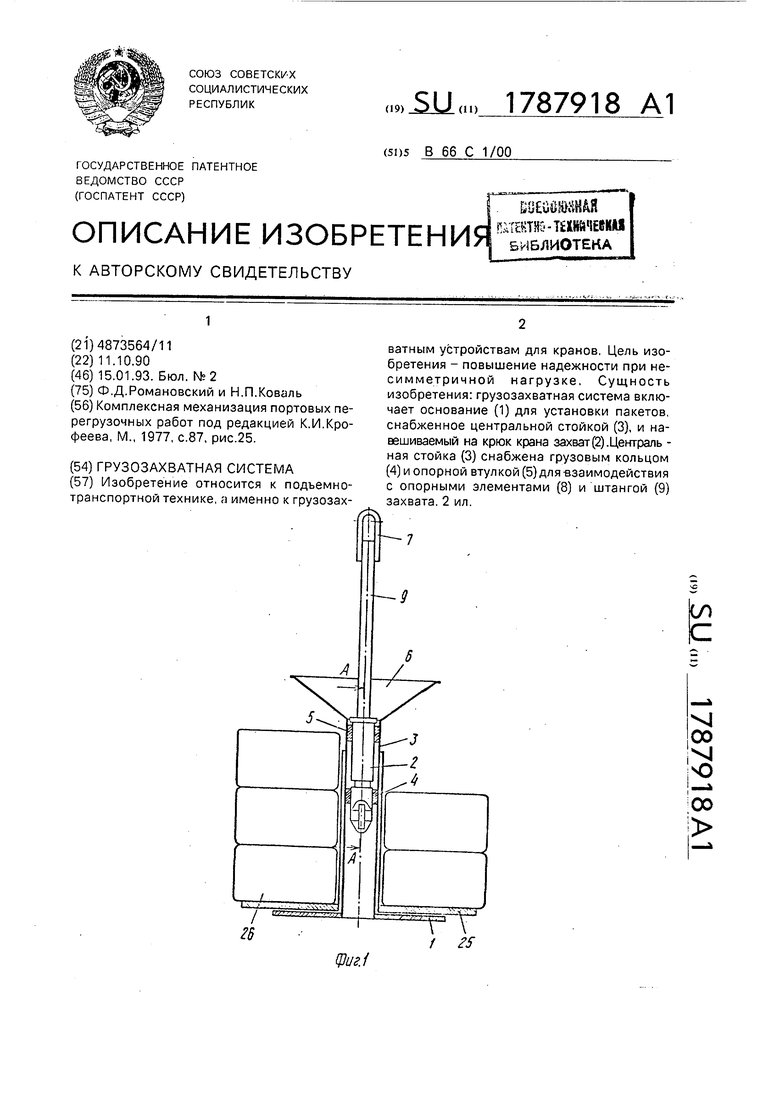
| Комплексная механизация портовых перегрузочных работ под редакцией К.И.Кро- феева, М., 1977, с.87, рис.25. |
