Изобретение относится к измерительной технике, предназначено для определения углов наклона подвижного объекта к вектору поля и может применяться для углового ориентирования в пространстве летательных аппаратов, подводных, надводных судов или других транспортных средств.
Известен способ определения направления и величины угла наклона объекта, в котором установленному на объекте маятнику сообщают принудительные колебания, в заданные моменты считывают его показания и по соответствующим зависимостям определяют искомую величину [1].
Недостаток известного способа заключается в невозможности его использования для углового ориентирования летательного аппарата.
Наиболее близким техническим решением к изобретению является способ, реализованный в устройстве, содержащем вращающуюся планку с закрепленными на ней пьезоэлементом и фотодиодом, который взаимодействует с источником света, установленным на объекте, углы наклона которого определяются [2]. В основу известного способа положено образование строб-импульсов при вращении планки. Во время совмещения фотодиода и источника света с истинной вертикалью строб-импульс образуется строго по середине одного из полупериодов опорного сигнала, деля его на две равные части. При отклонении объекта от истинной вертикали строб-импульс делит полупериод опорного сигнала на неравные временные интервалы, разность которых с учетом знака позволяет определить величину и направление угла наклона объекта.
Недостатки известного способа заключаются в том, что диапазон измеряемых углов наклона объекта ограничен длительностью полупериода опорного сигнала, а расширение этого диапазона возможно только косвенно, путем логических операций электронной схемы, реализующей способ. Кроме того, возможна недостоверность измерений при нестабильности частоты генератора счетных импульсов и изменении скорости вращения планки.
Техническим результатом изобретения является достоверность и требуемая точность измерений в необходимом диапазоне измеряемых углов вне зависимости от стабильности работы средств, реализующих способ.
Указанный технический результат достигается тем, что при определении угла наклона объекта предложенным способом вращают датчик поля, определяющий ось неподвижной системы координат, ориентируют плоскость вращения оси датчика относительно соответствующей строительной оси объекта, характеризующей подвижную систему координат, и определяют направление и величину угла наклона объекта, причем при вращении датчика поля непрерывно измеряют текущее значение его угла поворота относительно строительной оси объекта, в момент совпадения текущего значения сигнала поля с заданным значением считывают величину угла поворота оси датчика поля, а направление и величину угла наклона объекта определяют по считанной величине угла поворота оси датчика поля, сигнал датчика поля интегрируют.
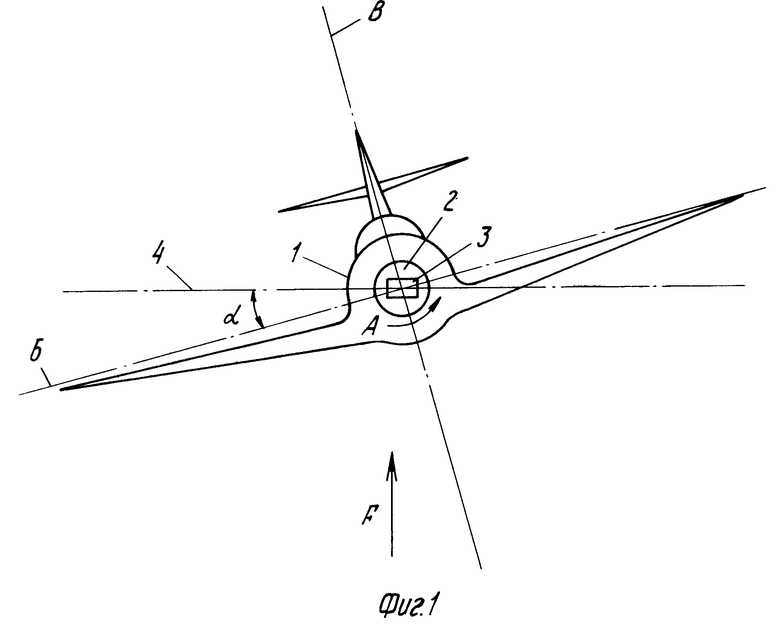
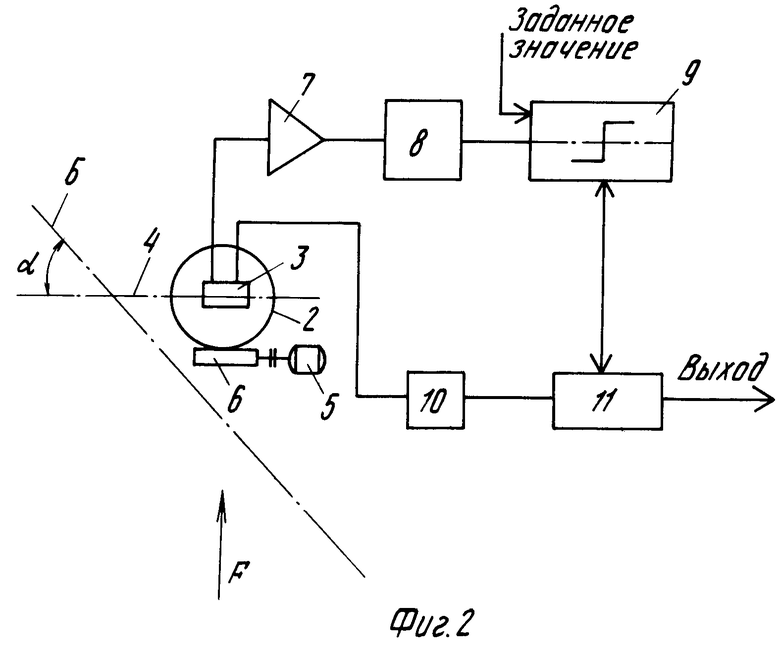
Фиг. 1 поясняет способ измерения угла крена летательного аппарата; на фиг.2 показана принципиальная схема устройства для реализации способа.
На подвижном объекте 1 (ЛА) монтируют платформу 2 (фиг.1) с возможностью ее непрерывного вращения в одном из выбранных направлений по стрелке А (направление вращения платформы для способа несущественно). На платформе 2 закреплен датчик 3 поля, ось 4 чувствительности которого ориентируют соответствующим образом в зависимости от того, какой из углов наклона объекта в пространстве определяют. Так, если определяют угол крена, то плоскость вращения оси 4 должна быть параллельна поперечной Б и нормальной В строительным осям объекта; если определяют угол тангажа (для ЛА) или дифферента (для надводного или подводного судна), то плоскость вращения оси 4 устанавливают параллельно нормальной В и продольной (не показана) строительным осям объекта.
Очевидно, что строгая параллельность плоскости вращения оси 4 и соответствующих строительных осей объекта может не соблюдаться. В этом случае вводится соответствующая корректирующая поправка.
Для этого ось 4 датчика 3 вращают в плоскости, параллельной строительным осям: поперечной Б и нормальной В.
При вращении оси 4 датчик 3 выдает синусоидальный сигнал, нулевое значение которого наступает в момент, когда ось 4 займет положение, перпендикулярное вектору F поля. Нулевое значение сигнала принимают за заданное значение (в качестве заданного значения может быть выбрано любое другое). В этот момент считывают величину угла α между осью 4 датчика и строительной осью Б ЛА (можно также считывать и величину угла между осью 4 датчика и осью В объекта).
Если в момент считывания ось 4 параллельна оси Б, т.е. угол α между ними равен нулю, то аппарат крена не имеет. В другом случае величина угла α будет определять величину угла крена ЛА.
На платформе 2, получающей вращение от мотора 5 (фиг.2) через редуктор 6, закреплен датчик 3 поля, показанного вектором F. Сигнал измеренной датчиком 3 равнодействующей (или одной из составляющих) вектора F через усилитель 7 и интегратор 8 подается на компаратор 9, в который введено заданное значение сигнала. Одновременно датчик 10 считывает сигнал текущего значения угла поворота датчика 3 (его оси 4 или платформы 2) относительно строительной оси Б объекта, который подается на блок 11 памяти. При совпадении на компараторе 9 текущего и заданного значений уровня сигнала датчика 3 с компаратора на блок 11 поступает команда, по которой запоминается текущее значение угла поворота датчика 3. Это запомненное значение подается на выход устройства и остается неизменным в течение полного оборота датчика 3.
Способ может быть использован при определении угла наклона подвижного объекта к вектору любого поля, для чего выбирается соответствующий датчик 3.
С наибольшей эффективностью способ может быть использован при автоматизации управления ЛА, когда при выполнении виража требуется определить угол наклона ЛА не к земной поверхности, а к кажущейся вертикали (к равнодействующей центробежных, инерционных, гравитационных сил).
Так, при выполнении координированного разворота, несмотря на фактический наклон ЛА к земной поверхности, угол крена ЛА к кажущейся вертикали должен быть равен нулю (правильный вираж), иначе ЛА будет проходить вираж со скольжением, что приведет к невыполнению полетного задания (вследствие скольжения ЛА не попадает в заданную точку пространства).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ СБРОСЕ ГРУЗОВ В ТОЧКУ ЗЕМНОЙ ПОВЕРХНОСТИ С МАНЕВРИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2295104C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2556286C1 |
| Способ одновременного измерения вектора скорости летательного аппарата и дальности до наземного объекта | 2016 |
|
RU2658115C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОЙ ПОСАДОЧНОЙ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2494932C1 |
| Способ динамической юстировки систем координат вертолета на основе их векторного согласования | 2023 |
|
RU2795354C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2527369C1 |
| Одноколейный двухколесный автоматизированный скутер и способ его использования | 2018 |
|
RU2702365C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ РАЗДЕЛЬНОГО УПРАВЛЕНИЯ БОКОВЫМ И ВЕРТИКАЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ЛА | 1998 |
|
RU2141624C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЕНИЯ ПРИВОДАМИ ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА В ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМАХ СОПРОВОЖДЕНИЯ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ОПТИКО-ЭЛЕКТРОННУЮ СИСТЕМУ СОПРОВОЖДЕНИЯ | 2006 |
|
RU2310888C1 |
Использование: измерительная техника. Сущность изобретения: для определения угла наклона объекта датчик поля располагают на объекте так, чтобы он вращался относительно строительных осей объекта. В процессе измерений датчик поля непрерывно вращают в плоскости оси его чувствительности, ориентированной относительно двух соответствующих строительных осей объекта, при этом считывают величинуу текущего угла между осью чувствительности и одной из строительных осей в моменты, когда сигнал датчика поля будет равен заданному значению. По величине считанного угла находят угол наклона объекта. 1 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Датчик угловых отклонений объектов | 1974 |
|
SU504085A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
