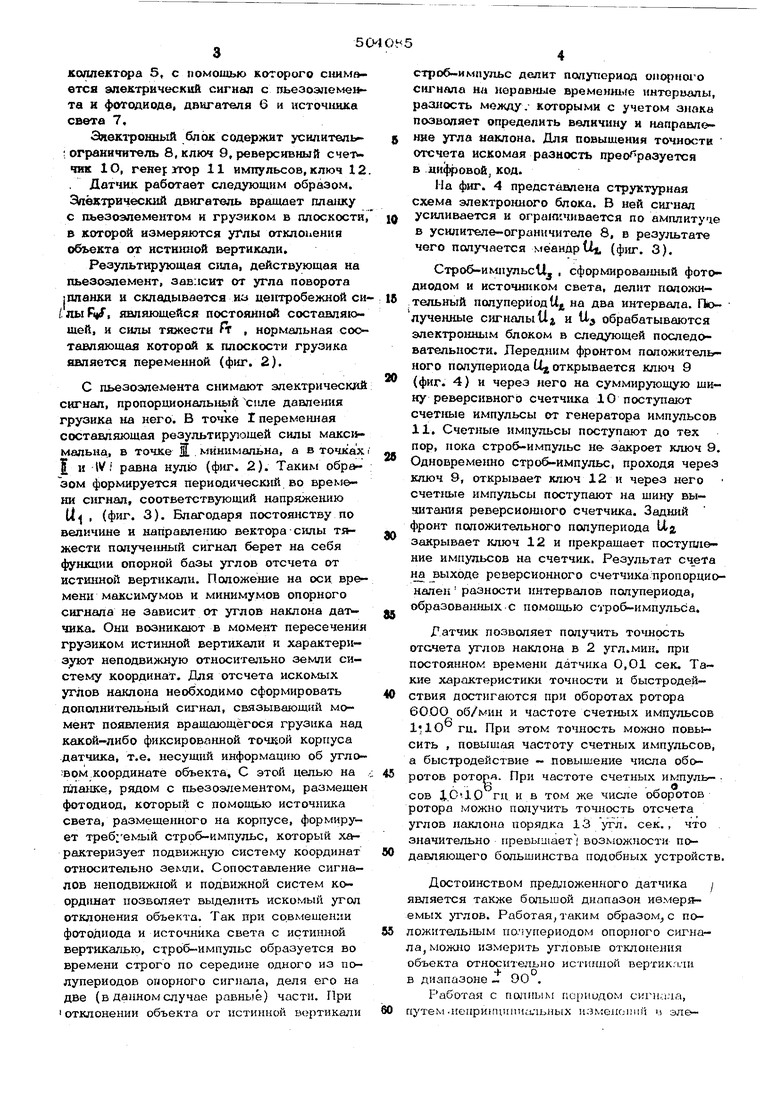
(54) ДАТЧИК УГЛОВЫХ ОТКЛОНЕНИЙ ОБЪЕКТОВ коллектора 5, с помощью которого ciuiM етс8 электрический сигнал с пьезоэ; емеы та и фотодиоде, двигателя Q и нсточ1шка света 7. Энекаронный блок содержит усилитель ; ограничитель 8, ключ 9, реверсивный сче. чик 10, генер зтор 11 импульсов, ключ 12 Датчик работает следующим образом. ЗпёК1рическ}1й двигатель вращает плшшу с пьезоэлементом и грузиком в плоскости в которой измеряются углы откло11ения от истншюй вертикали. Результирующая сила, действующая на пьеэоэлемент, завлсит от угла поворота планки ц складывается из центробежной сИ (jibifV, являющейся постоянней составля1о щей, и силы тяжести Яг , нормальная составляющая которой к плоскости грузика является переменной (фиг. 2). С пьезозлемента снимают зпектрическдй сигнал, пропорциональный силе давления грузика на него. В точке I переменная составляющая результирующей силы максимальна., в точке SL , минимальна, а в точках f и IV f равна нулю (фиг. 2). Таким обраЪом формируется периодический во времени сигнал, соответствующий напряжению U , (фиг. 3). Благодаря постоянству по величине и напраапению вектора силы т жести палученньп сигнал берет на себя функции опорной базы углов отсчета от истинной вертикали. Положение на оси времени макс ик1умов и минимумов опорного сигнала не зависит от углов наклона датчика. Они возникают в момент пересечения грузиком истинной вертикали и характеризуют неподвижную относительно земли систему координат. Для отсчета искомых углов наклона необходимо сформировать дополнительный сигнал, связывающий момент появления вращающегося грузика над какой-либо фиксированной точкой корпуса датчика, т.е. несущий информацию об угло- :вом координате объекта, С этой целью на плаике, рядом с пьезоэлементом, размещен фотодиод, который с помощью источника света, размещенного на корпусе, формирует треб;еьа.1й строб-импульс, который хаграктеризует подвижную систему координат относительно земли. Сопоставление сигналов неподвижной и подвижной систем координат позволяет выделить искомый угол отклонения объекта. Так при совмещении фотодиода и источника света с истинной вертика шю, строб-импульс образуется во времени строго по середине одного из полупериодов опорного сигнала, деля его на две (в данном случае равные) части. При отклонении объекта от истинной всгртнкали строб-импульс делит полупериод опорного стенала на неравные временш.(е интервалы, между, которыми с учетом знака позволяет определить величину и направление угла наклона. Для повыщения точно :ти отсчета искомая разность прео разуется в )ровой, код. На фиг. 4 представлена структурная схема электронного блока. В ней сихнал усиливается и ограшшивается по амплитуде в усилителе-ограничителе 8, в результате чего получается меандрUj, (фиг. 3). Строб-импульси, , сформирова1шый фотодиодом и источником света, делит полонштельный полупериод Ujj на два интервала. Полученные сигналы Uj и U обрабатываются электроша.1м блоком в следующей последовательности. Лереднкм фронтом положительного полупериода Uj. открывается ключ 9 (фиг. 4) и через него на суммирующую щину реверсивного счетчика 10 поступают счеТ1Ш1е импульсы от генератора импульсов 11. Счетные импульсы поступают до тех пор, пока стро импульс не закроет кшоч 9. Одновременно строб-импульс, проходя через ключ 9, открывает ключ 12 и через него счетные импульсы поступают на щину вынитания реверсиошюго счетчика. Задний фронт положительного попупериода Ua закрывает ключ 12 и прекращает поступление импульсов на счетчик. Результат счета на выходе реверсионного счетчика пропорционален разности интервалов полупериода, образованных с помощью строб-импульса. Гатчик позволяет получить тo шocть отсчета углов наклона в 2 у гл. мин. при постоянном времени датчика 0,01 сек. Такие характеристики точности и быстродействия достигаются при оборотах ротора 6ООО об/мин и частоте счетных импульсов ГЦ. При этом точность можно повысить , повышая частоту счетных импульсов, а быстродействие - повышение числа оборотов роторя. При частоте счетных импуль- сов 1.6(10 ГЦ и в том же числе оборотов ротора можно получить точность отсчета углов наклона порядка 13 ггл. сек., что значительно npeBbiuiaeT возможности подавляющего большинства подобных устройств. Достоинством предложенного датчика / является также большой диапазон ивмеряемых углов. Работая, таким обр аз ом с поожительным по. упериодом опорного сигнаа, можло измерить угловые отклонения объекта относительно истинной вертикпли в диапазоне 90 . Работая с полным Г10)Иидом сигнала, путем-иеирикиишисшных измеиоиш i.i эле-
Uz
Uif.
L
п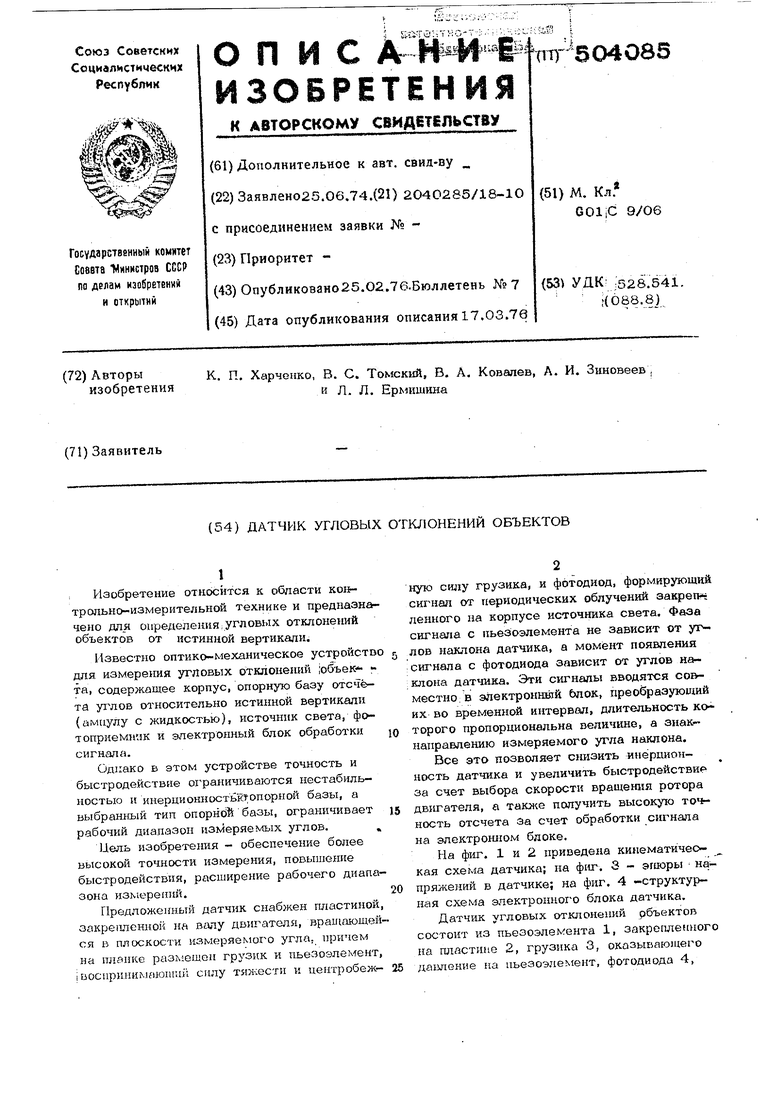

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых отклонений объектов | 1984 |
|
SU1204926A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ОБЪЕКТА | 1991 |
|
RU2032145C1 |
| Устройство для считывания графической информации | 1989 |
|
SU1735881A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА КОМАНДЫ ОДНОКАНАЛЬНЫХ ВРАЩАЮЩИХСЯ РАКЕТ И СНАРЯДОВ С РЕЛЕЙНЫМ РУЛЕВЫМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574500C2 |
| Лазерный судовой измеритель скорости | 2018 |
|
RU2689273C1 |
| Устройство для считывания графической информации | 1989 |
|
SU1635203A1 |
| Устройство для считывания графической информации | 1990 |
|
SU1728872A1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |
| Измеритель толщины покрытия двухслойных диэлектрических материалов | 1981 |
|
SU977935A1 |

Техред М. Ликович Редактор E. Кравиова
Заказ 89 Тираж 864Подписное
ЦНИИПИ Государственного комитета Совета Министров СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
4 илиал ПИП Патент, г. Ужгород, ул, Гагарина, 1OI
UK
w
Ф14г. Составитель Ю, Ступко Корректор В. Микита
ктроилой частя, можно рас иирит1 рабочий диапазон до - 18О .
Формула изобретения
Датчик уг-ловых отклонения объектов, содержшдий корпус с раэме1цеш1ыми п ней oiiopitbiM элементом, фотоприем1шком, иоточником света и электронным блоком, отличающийся тем, что, с целью .по).1шения, быстродейстпия, точности и расширения диапазона измерений, датчик снабжен имеющей возможность врашения пластиной, на которой закреплены пьезоэлемент с грузиком и фотоприемник, ; соединенные с электронным блоком.
