Изобретение относится к электронному оборудованию транспортных средств (ТС) и предназначено для использования в устройствах для предотвращения столкновений ТС с объектами.
Известны способ и устройство предотвращения столкновений ТС [1].
Однако в этом способе и устройстве селекция объектов осуществляется за счет направленного действия передающей и приемной антенн, характеризуемого формой луча, которая не соответствует форме дорожного полотна. Это приводит к тому, что в разряд опасных с точки зрения возможности столкновения попадают и те объекты, которые, находясь на большей дальности, имеют большее линейное отклонение от продольной оси ТС и опасности могут не представлять. Обработка сигналов от таких объектов (назовем их помехами) требует увеличения пропускной способности последующих схем. Кроме того, они могут вызывать срабатывание устройства предотвращения столкновения и тем самым приводить к дополнительному износу ТС.
Известны более точные способы селекции объектов, например путем использования моноимпульсного метода пеленгации и соответствующих устройств для его реализации. Обзорная моноимпульсная пеленгация позволяет определять дальность и угловые координаты (пеленги относительно равносигнального направления) всех объектов, находящихся в пределах главного лепестка диаграммы направленности и разрешаемых по дальности (Леонов А.И. и др. Моноимпульсная радиолокация. М.: Сов. радио, 1970, с. 6).
Наиболее близким к предлагаемым являются обобщенный способ моноимпульсной пеленгации объектов и устройство для его реализации, выдающие для каждого объекта сигналы пеленга и дальности до него [2].
Однако эти способ и устройство, позволяя определять более точно углы пеленга объектов, обладают в то же время недостатком, заключающимся в том, что главный лепесток диаграммы направленности также не соответствует форме дорожного полотна, а пеленгационная характеристика в пределах главного лепестка дает неоднозначный отсчет угла пеленга объекта по сигналу пеленга. Кроме того, можно заметить, что при сближении модуль угла пеленга растет, следовательно, производная огибающей сигналов пеленга на боковых ветвях пеленгационной характеристики (ПХ) имеет иной знак, чем на центральной ее ветви.
Целью изобретения является упрощение аппаратуры (уменьшении требуемой пропускной способности схем обработки сигналов) и исключение срабатываний устройства предотвращения столкновений ТС с объектами по помехах за счет селекции сигналов от объектов, сближающихся с ТС и представляющих наибольшую опасность (с точки зрения возможного столкновения) путем формирования в координатах пеленг-дальность желаемой формы зоны опасного сближения ТС с объектами (например, приближая ее, при необходимости, к форме дорожного полотна, прямоугольной на значительном участке) и подавления сигналов пеленга от всех объектов-помех, находящихся за границами указанной зоны.
Для этого в известном способе (методе) моноимпульсной пеленгации, включающем определение дальности D и пеленга ϕ относительно равносигнального направления (РСН) всех объектов, находящихся в пределах луча пеленгатора и разрешаемых по дальности, формируют граничные значения сигнала пеленга для каждого значения дальности (например, по критерию сохранения постоянного для всех дальностей предельно допустимого линейного отклонения объекта от продольной оси ТС в случае прямоугольной зоны), сравнивают с этими граничными значениями сигналы пеленга и подавляют сигналы пеленга помех, т.е. объектов, значения сигналов пеленга которых выходят за пределы граничных значений сигналов пеленга для данной дальности, определяют производную огибающей сигналов пеленга и ее знак, в соответствии с которым селектируют сигналы пеленга, пропуская на выход только те из них, знак производной огибающей которых соответствует положению объекта в пределах центральной ветви пеленгационной характеристики (т.е. положительный).
Цель достигается также тем, что в моноимпульсный пеленгатор, определяющий дальность и пеленг объектов относительно равносигнального направления (РСН), введены последовательно соединенные с выходом пеленгатора по дальности формирователь граничных значений сигнала пеленга для каждой дальности (или для каждого дискретного значения дальности, блок сравнения с этими граничными значениями текущего сигнала пеленга и подавления сигналов пеленга помех, т.е. сигналов пеленга, величины которых выходят за пределы граничных значений сигналов пеленга для данной дальности, вычислитель производной и знака производной огибающей сигнала пеленга, селектор сигналов пеленга с положительной производной огибающей сигнала пеленга.
Сходные отличительные признаки предлагаемых способа селекции сигналов от объектов, сближающихся с транспортным средством, и устройства для его осуществления в известных технических решениях не обнаружены, что позволяет считать, что предлагаемые способ и устройство обладают существенными отличиями.
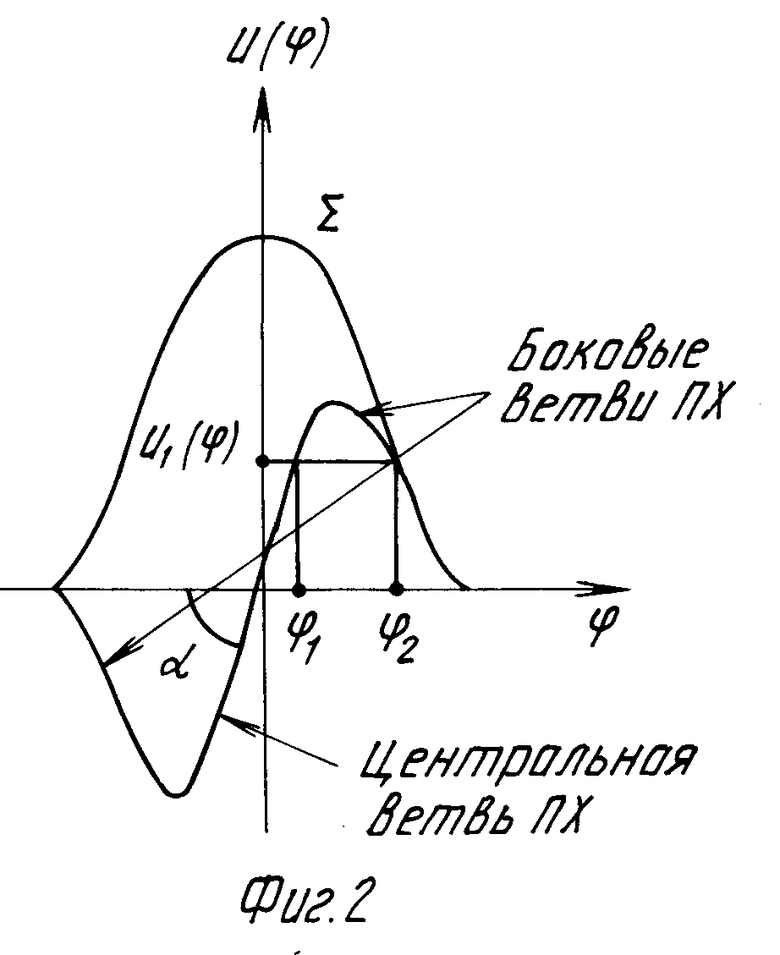
На фиг. 1 представлена структурная схема устройства селекции сигналов от объектов, сближающихся с транспортным средством; на фиг. 2 - пеленгационная характеристика моноимпульсного пеленгатора.
Устройство обеспечивает определение дальности и углов пеленга относительно РСН всех объектов, находящихся в пределах диаграммы направленности пеленгатора и разрешаемых по дальности, формирование граничных значений сигналов пеленга для каждого значения дальности, сравнение с этими граничными значениями текущих значений сигналов пеленга и подавление сигналов пеленга помех, т.е. объектов, сигналы пеленга которых выходят за пределы граничных значений для данной дальности, определение производной и знака производной огибающей сигналов пеленга, селекцию сигналов пеленга, знак производной огибающей которых положительный.
Устройство содержит моноимпульсный пеленгатор 1, последовательно соединенные с его выходом по сигналу дальности формирователь 2 граничных значений сигнала пеленга для каждой дальности (или ее дискрета), блок 3 сравнения сигналов пеленга с граничными значениями и подавления сигналов пеленга помех, величины которых выходят за пределы граничных значений, блок 4 вычисления производной и знака производной огибающей сигнала пеленга, селектор 5 сигналов пеленга, второй вход которого соединен с выходом моноимпульсного пеленгатора 1 по сигналу пеленга и вторым входом блока 3 сравнения сигналов пеленга и подавления сигналов пеленга помех.
Устройство работает следующим образом.
Моноимпульсный пеленгатор 1 определяет дальности в пределах главного лепестка диаграммы направленности и сигналы пеленга в горизонтальной плоскости всех разрешаемых по дальности объектов. С целью формирования зоны опасного сближения необходимо подавить сигналы от объектов-помех, которые находятся за пределами зоны опасного сближения. Условие отбора сигналов для последующей обработки можно выразить формулой
ϕгр.лев.=arcsin  ≅ ϕ≅ arcsin
≅ ϕ≅ arcsin  = ϕгр.пр.
= ϕгр.пр.
или при дискретной дальнометрии:
ϕгр.лев.i=arcsin  ≅ ϕi≅ arcsin
≅ ϕi≅ arcsin 
 ϕгр.пр.i
ϕгр.пр.i
Очевидно, что пеленг ϕ определяется по известной формуле
ϕ =  где Uϕ - сигнал пеленга;
где Uϕ - сигнал пеленга;
К - размерный коэффициент усиления приемного тракта пеленгатора, включающий крутизну пеленгационной характеристики.
Величина Δ lгр. выбирается с учетом ширины транспортного средства и допустимого интервала (расстояния между бортом ТС и объектом) разъезда. Для прямоугольной формы зоны опасного сближения Δ lгр. = const и она симметрична относительно РСН. Для несимметричных форм зоны раздельно задают значения Δ lгр. справа и слева от РСН ( Δ lгр.пр., Δ lгр.лев.).
Все сигналы, не удовлетворяющие условию, считаются принадлежащими объектам-помехам, не представляющим опасности, и подавляются в блоке 3.
Все сигналы пеленга, удовлетворяющие указанному условию, используются для формирования сигнала предупреждения, т.е. формируют зону опасного сближения. Для этого в формирователе 2 граничного значения сигнала пеленга для каждой дальности или дискрета дальности формируют пороговые (граничные) сигналы, с которыми в блоке 3 сравнения сравнивают сигналы пеленга объекта, получаемые с выхода моноимпульсного пеленгатора 1.
Если сигнал пеленга не удовлетворяет данному условию, то он подавляется, если же удовлетворяет данному условию, то проходит на блок 4 вычисления производной и знака производной огибающей сигнала пеленга.
В связи с тем, что нас интересуют только те объекты, на дороге с которыми ТС сближается, углы пеленга таких объектов со временем увеличиваются и в соответствии с пеленгационной характеристикой увеличиваются их сигналы пеленга. Следовательно, производная огибающей сигналов пеленга интересующих нас объектов, которые находятся в пределах ее центральной (восходящей) ветви (фиг. 2), будет положительной, т.е.
U(ϕ , t)' > 0.
Объекты, пеленги которых соответствуют боковым ветвям пеленгационной характеристики, не представляют опасности при сближении, рассматриваются как объекты-помехи и сигналы от них, как сказано выше, подавляются по признаку знака производной огибающей сигналов пеленга при сближении, так как при монотонном увеличении угла пеленга он отрицательный. Полученный в блоке 4 сигнал знака производной огибающей угла пеленга подают на вход селектора 5 сигналов пеленга, на другой вход которого подают сигналы пеленга от всех обнаруженных объектов с выхода сигналов пеленга моноимпульсного пеленгатора 1. В результате на выходе селектора появляются сигналы пеленга только тех объектов, которые находятся в зоне опасного сближения.
Все элементы функциональной схемы легко реализуются как в аналоговом, так и в цифровом вариантах. Тригонометрическая функция sin ϕ заменяется углом ϕ , так как углы пеленга лежат в пределах единиц градусов и погрешность не будет превышать 0,5-1,0%. Схема сравнения и подавления помехи может быть построена на обычной схеме совпадения с предварительным пороговым устройством, в котором порог управляется напряжением дальности. Схемы вычисления производной и ее знака также общеизвестны. Селектор по существу является обычной схемой совпадения сигналов пеленга с сигналом знака производной.
Положительный эффект предлагаемого способа селекции сигналов от объектов, сближающихся с транспортным средством, заключается в селекции для последующей обработки сигналов только от тех объектов, которые представляют наибольшую опасность с точки зрения возможности столкновения с ними, и в подавлении сигналов от объектов-помех при исключении влияния неоднозначности пеленгационной характеристики.
Очевидно, что предлагаемый способ может быть использован для формирования зон различной формы (прямоугольной, треугольной, трапецеидальной, смещенной по отношению к равносигнальному направлению, несимметричной типа "окно" и т.п.).
Положительный эффект в предлагаемом способе достигается формированием граничных (предельно допустимых) значений сигналов пеленга для каждого значения (для дискрета) дальности, подавлением сигналов пеленга, значения которых выходят за пределы граничных значений, и определением производной огибающей сигналов пеленга и ее знака, в соответствии с которым селектируют сигналы пеленга, пропуская на выход только те из них, знак производной огибающей которых соответствует положению объекта в пределах центральной ветви пеленгационной характеристики моноимпульсного пеленгатора (т.е. положительный).
Положительный эффект в предлагаемом устройстве достигается введением в моноимпульсный пеленгатор схемы формирования граничных (предельно допустимых) значений сигналов пеленга для каждой дальности, схемы сравнения и подавления сигналов пеленга, превышающих граничные (предельно допустимые) значения, вычислителя производной и знака производной огибающей сигнала пеленга и селектора сигналов пеленга с положительным знаком производной огибающей.
Технический эффект заключается в селекции объектов, опасных с точки зрения возможного столкновения ТС с ними, и формировании сигналов пеленга для дальнейшей обработки при подавлении сигналов от всех остальных объектов, не представляющих интереса с точки зрения возможности столкновения с ними и потому рассматриваемых как помеха.
Использование: в системах предотвращения столкновений транспортных средств. Сущность изобретения: способ селекции сигналов от объектов, сближающихся с транспортным средством, заключается в том, что в пеленгаторе формируют в координатах пеленг относительно равносигнального направления - дальность зону опасного сближения, сигналы от объектов, находящихся вне зоны, подавляют, используя для устранения неоднозначности пеленгационной характеристики в пределах главного луча пеленгатора знак производной огибающей сигнала пеленга, и оставляют сгналы только от опасных объектов. Устройство содержит моноимпульсный пеленгатор 1, формирователь 2 граничных значений сигнала пеленга для каждой дальности, блок 3 сравнения и подавления, блок 4 вычисления производной и знака производной огибающей сигнала пеленга и селектор 5 сигналов пеленга. 1-2-3-4-5-3, 1-5. 2 с.п. ф-лы, 2 ил.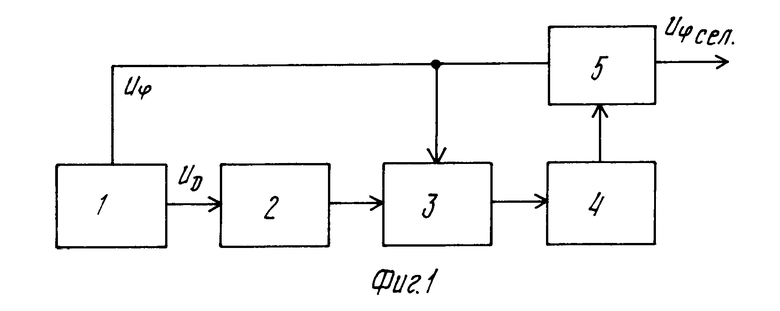
СПОСОБ СЕЛЕКЦИИ СИГНАЛОВ ОТ ОБЪЕКТОВ, СБЛИЖАЮЩИХСЯ С ТРАНСПОРТНЫМ СРЕДСТВОМ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Леонов А.И | |||
| и др | |||
| Моноимпульсная радиолокация | |||
| М.: Советское радио, 1970, с.24, 244. | |||
