Изобретение относится к угловым селекторам (УС) радиолокационных целей и служит для устранения угловой неоднозначности (многозначности) обзорных моноимпульсных радиолокаторов (ОМРЛК) при сопровождении целей на проходе (СНП). Указанная неоднозначность ОМРЛК обусловлена многолепестковостью диаграммы направленности антенны (ДНА) и пеленгационной характеристики (ПХ) [например, С. А Вакин, Л.Н Постов. Основы радиопротиводействия и радиотехнической разведки. М.: Сов. радио, 1968, рис. 4.3 и 4.4 на с. 171, 172].
Известен УС для ОМРЛК [например, Защита от радиопомех / Под ред. M.B. Максимова. М. : Сов. радио, 1976, рис. 7.22 б на с. 359], функциональная схема которого изображена на фиг.1 прилагаемых чертежей.
Устройство содержит включенные последовательно определитель модуля |U| и пороговый решающий блок (ПРБ), формирующий сигнал индикации наличия цели в рабочем диапазоне углов или за его пределами по результатам сравнения входного сигнала |U| с пороговым Uп, соответствующим границе рабочего диапазона углов ОМРЛК.
Рабочий диапазон углов ОМРЛК, расположенный вокруг главного равносигнального направления (РСН), представляет собой лишь часть главной равносигнальной зоны (РСЗ) ПХ, например, в пределах эффективной ширины ДНА. Известное устройство посредством установленного порога Uп по уровню сигнала угловой ошибки (СУО) уменьшает размер апертуры ПХ за пределами рабочего диапазона углов, в том числе по боковым лепесткам ДНА.
Однако при любых отличных от нуля значениях порога (Uп≠0) боковые РСЗ ПХ не могут быть устранены полностью.
Другим недостатком известного устройства является снижение его селектирующей способности (увеличение угловой неоднозначности) за счет влияния случайной составляющей измеряемого СУО. Так, в известном устройстве случайная составляющая U, а следовательно, и разброс измеряемых значений для фиксированного углового смещения в пределах эффективной ширины луча антенны значительно возрастает (в 2-3 раза) по сравнению с РСН [например, Д. Бартон, Г. Вард. Справочник по радиолокационным измерения. М.: Сов. радио, 1976, рис. 2.12 на с. 57], что увеличивает угловую неоднозначность устройства в боковых РСЗ.
Однако известный угловой селектор по составу элементов и их функциональным связям исключает возможность сглаживания указанной составляющей сигнала U по разовым отсчетам.
В то же время в известном устройстве часть угловой информации, содержащейся в измеряемых СУО, не используется для угловой селекции. Так, в соответствии с ПХ ОМРЛК [например, С.А Вакин, Л.И. Цветов. Основы радиопротиводействия и радиотехнической разведки. М.: Сов. радио, 1968, рис. 4.3 на с. 173 и др.] СУО, измеряемые им в главной и боковых РСЗ, являются различными функциями угловых рассогласований относительно соответствующих РСН, что может служить признаком для устранения указанной угловой многозначности.
Однако известное устройство на фиг. 1 по составу элементов и их функциональным связям не реализует указанной возможности.
Технической задачей данного изобретения является устранение указанного недостатка, а именно устранение угловой неоднозначности по априорно известным различиям СУО в главной и боковых РСЗ ПХ.
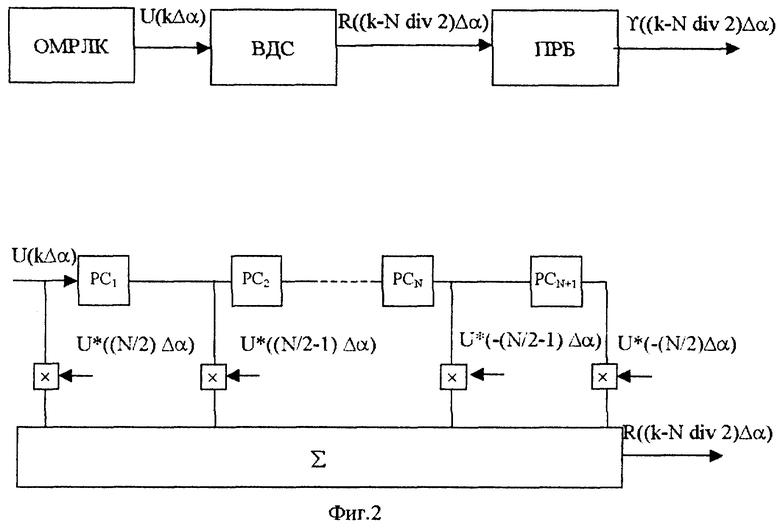
Поставленная задача решается тем, что в УС для ОМРЛК, содержащий ПРБ с выходом для сигнала индикации цели в рабочем диапазоне углов и за его пределами, дополнительно введен весовой дискретный сумматор (ВДС) на скользящем интервале, подключенный своим входом к выходу ОМРЛК для СУО, а своим выходом - к сигнальному входу ПРБ.
Введенные отличия (указанный ВДС и его функциональные связи) позволили сформировать и использовать в качестве признаков угловой селекции различия в значении функции корреляции СУО, измеряемых на скользящем интервале, с их копией на фиксированном интервале для рабочего диапазона углов. Функциональные схемы известного и предложенного устройств изображены на фиг.1 и фиг.2 соответственно. Принцип работы предложенного устройства и достигаемый технический результат поясняются графически на фиг 3.
ОМРЛК с выходом для СУО, используемый по тому же назначению, описан, например, в научно-технической литературе [П.И. Дудник, Ю.И. Чересов. Авиационные радиолокационные устройства. М. : Изд. ВВИА им Жуковского, 1986, рис. 10, 9 на с. 297 и др.].
ВДС на скользящем интервале, изображенный на функциональной схеме на фиг.2 прилагаемых чертежей, содержит:
- линейку регистров сдвига PСi (i=1..N+1) для хранения (N+1) дискретных отсчетов СУО U(kΔα) (где Δα - интервал дискретности по углу;
N - количество дискретных отсчетов, соответствующее ширине рабочего диапазона углов;
k - индекс, соответствующий номеру угловой позиции антенны при СНП на скользящем интервале [k-N/2, k+N/2];
- умножители с задатчиками весовых коэффициентов U*(jΔα), являющихся копией значений СУО на фиксируемом интервале в рабочем диапазоне углов (j= -N/2...N/2);
- сумматор, объединяющий своими входами выходы умножителей для весового суммирования их выходных сигналов на скользящем интервале, формирует функцию корреляции.

[Например, Л. С. Гольдфарб. Теория автоматического регулирования, часть 2. М.: МЭИ, 1965, выражение 2.19 на с. 22].
ПРБ в предложенном устройстве выполняет операцию принятия решения ϒ((k-N div 2)Δα) = 1,0 о превышении или не превышении входным сигналом R((k-N div 2)Δα) порогового уровня Rп, а именно:
ВДС на скользящем интервале и ПРБ широко используются в радиолокационной аппаратуре и могут быть заимствованы, например, из учебного пособия для радиотехн. спец. вузов. Проектирование радиолокационных приемных устройств / Под ред. М.А Соколова. М.: Высшая школа, 1984, рис. 1.30 и 1.36 на с. 38 и 42 соответственно.
Заявленное устройство работает следующим образом. Измеряемые ОМРЛК при СНП СУО U(kΔα) подаются на сигнальный вход ВДС на скользящем интервале, формирующий функцию корреляции R((k-N div 2)Δα), измеряемого СУО U((k-j)Δα с его копией U*(jΔα) на фиксированном интервале рабочего диапазона углов [-(N/2)Δα, (N/2)Δα]. Сигнал R((k-N div 2)Δα) является функцией углового рассогласования и своего максимального значения достигает при kΔα = 0, т.е. при совмещении по углу указанных сигналов, как показано на фиг.3 прилагаемых чертежей, что обеспечивает возможность индикации с помощью ПРБ наличия целей в рабочем диапазоне углов (ϒ = 0), или за его пределами (ϒ = 1). Сигнал R((k-N div 2)Δα) представляет собой усредненное на скользящем интервале значение U((k-j)Δα)U*(jΔα), что создает эффект уменьшения флуктуационной составляющей. Причем выигрыш составляет  раз.
раз.
Технический результат от реализации заявляемого УС, по сравнению с используемым в серийных бортовых радиолокаторах (на основе дополнительного радиолокационного канала с широко направленной антенной), заключается в возможности устранения угловой неоднозначности (многозначности) на основе данных лишь моноимпульсных измерений, что особенно существенно из-за ограничений по масоогабаритным и энергетическим параметрам для бортовой аппаратуры.

Угловой селектор для обзорного моноимпульсного радиолокатора (ОМРЛК) содержит пороговый решающий блок (ПРБ). Для устранения угловой недостаточности при сопровождении целей на проходе в него дополнительно введен весовой дискретный сумматор на скользящем интервале (ВДС) с выходом для сигнала индикации цели в рабочем диапазоне углов и за его пределами. Причем ВДС подключен своим входом к выходу ОМРЛК для сигнала угловой ошибки, а своим выходом - к сигнальному входу ПРБ. Достигаемым техническим результатом является устранение угловой неоднозначности по априорно известным различиям сигнала угловой ошибки (СУО) в главной и боковых равносигнальных зонах (РСЗ) пеленгационной характеристики (ПХ). 3 ил.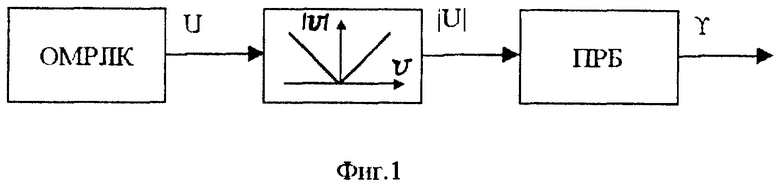
Угловой селектор для обзорного моноимпульсного радиолокатора (ОМРЛК), содержащий пороговый решающий блок (ПРБ) с выходом для сигнала индикации цели в рабочем диапазоне углов и за его пределами, отличающийся тем, что в него дополнительно введен весовой дискретный сумматор на скользящем интервале, подключенный своим входом к выходу ОМРЛК для сигнала угловой ошибки, а своим выходом - к сигнальному входу ПРБ.
| МАКСИМОВ М.В | |||
| и др | |||
| Защита от радиопомех | |||
| - М.: Сов | |||
| радио, 1976, с.359 | |||
| RU 94022329 A1, 27.05.1996 | |||
| US 5241317, 31.08.1993 | |||
| Объемный насос | 1986 |
|
SU1402711A2 |

