Изобретение относится к лазерной технике и может быть применено в машинах, предназначенных для лазерной резки плоских заготовок из разных материалов. Предпочтительное использование изобретения для резки толстых заготовок из дерева или древесно-стружечных плит.
Известна машина для лазерной резки с перемещающейся обрабатывающей головкой, предназначенной для лазерной резки размещенной на столе заготовки путем ее облучения сфокусированным посредством установленного в головке устройства лучом, исходящим из генератора лазерного излучения. Головка может смещаться в соответствии с диаметром области распространения луча лазера на поверхности изделия, прошедшего фокусирующее устройство [1]
Известна также машина для лазерной резки изделий из кож [2] Машина содержит лазер, стол для размещения заготовки, манипулятор перемещения резака, оптическую систему для направления луча лазера в резак и его фокусировке на поверхности заготовки, устройства отвода газа от места резки и систему управления перемещением резака в двух взаимно перпендикулярных направлениях.
Эти машины не позволяют наращивать мощность луча путем суммирования излучений двух лазеров и резать толстые заготовки.
За прототип принята машина для резки плоских заготовок с двойной поляризацией и двойной частотой [3] Машина предназначена для резки листовых заготовок лазерным лучом. Она содержит манипулятор для перемещения заготовки, два лазера и оптическую систему соосного суммирования мощности двух лучей. Система содержит три плоских, отражающих, непрозрачных зеркала и одно полупрозрачное. Такая оптическая система принципиально не может обеспечить суммирование энергии двух лучей без существенных потерь, так как в лучшем случае, без учета потерь на переотражения, суммирующее полупрозрачное зеркало пропускает только 3/4 энергии каждого луча, остальная энергия рассеивается. Лучи фокусируются в этой машине в одной точке, поэтому она не может резать толстые заготовки.
Техническим результатом изобретения является увеличение эффективности резки толстых (до 50 мм) плоских заготовок путем суммирования энергии двух лазеров с высоким КПД (90%) и фокусировании лучей в разных точках по глубине реза.
Этот результат достигается благодаря тому, что лазерная машина содержит два лазера, станину, стол, манипулятор, блок управления манипулятором, фокусирующую систему и механизм расширения сечения луча лазера.
В состав манипулятора входят портал с приводом, установленный на направляющих, закрепленных на станине в плоскости, параллельной поверхности стола с возможностью перемещения, каретка с приводом, установленная на направляющих, закрепленных на портале в плоскости, параллельной поверхности стола, ортогонально направляющим портала с возможностью перемещения, блок управления манипулятором.
Фокусирующая система содержит фокусирующую линзу, три плоских непрозрачных зеркала, одно (первое от заготовки) расположено в плоскости, находящейся под углом 45о к поверхности стола, так что линия пересечения этой плоскости с поверхностью стола параллельна направляющим портала, центр этого зеркала лежит на оптической оси фокусирующей линзы, которая перпендикулярна поверхности стола и перед ней, они закреплены на каретке, механизм расширения луча лазера, который установлен перед лазером соосно его оптической оси.
Механизм содержит суппорт и два зеркала с криволинейными рабочими поверхностями, одно из которых выпуклое имеет диаметр, равный диаметру луча лазера, а другое вогнутое имеет центральное отверстие диаметром, равным диаметру луча лазера, диаметр самого зеркала равен диаметру расширенного луча лазера, расположены зеркала рабочими поверхностями навстречу друг другу и соосно оптической оси лазера вогнутым зеркалом в сторону лазера. Зеркала установлены на суппорте с возможностью относительного перемещения вдоль оптической оси механизма расширения луча.
Оптические оси лазеров лежат в одной плоскости, параллельной поверхности стола, и параллельны направляющим портала, стол установлен на домкратах с возможностью перемещения вдоль перпендикуляра к его поверхности.
Второе плоское зеркало имеет центральное отверстие диаметром не менее диаметра луча лазера и не менее диаметра выпуклого зеркала и закреплено на портале в плоскости, перпендикулярной плоскости стола, перед механизмом расширения луча под углом 45о к оптической оси лазера в точке пересечения этой оси и перпендикуляра, опущенного из центра первого плоского зеркала, установленного на каретке, отверстием соосно этому перпендикуляру.
Третье плоское зеркало закреплено также на портале перед другим лазером параллельно второму плоскому зеркалу в точке пересечения оптической оси второго лазера и перпендикуляра, опущенного из центра первого плоского зеркала.
Портал и каретка установлены на направляющих с помощью четырех колесных пар. Колесная пара содержит опорный и прижимной ролики, оси этих роликов, уголки опорного и прижимного роликов, узел крепления портала (каретки) к опорному ролику, узел крепления прижимного ролика к уголку опорного ролика и две пружины, работающие на сжатие. Такая конструкция колесной пары позволяет выбирать все люфты при перемещении портала (каретки) по направляющим.
Блок управления манипулятором содержит последовательно соединенные персональную ЭВМ (ПЭВМ), плату сопряжения (ПС) и устройство управления шаговыми двигателями (УУШД) приводов портала и каретки и приводом заслонки лучей лазеров.
ПЭВМ содержит микропроцессор (МП), память и программное обеспечение (ПО). ПС содержит интерфейсное устройство (ИФУ), три цифровых управляемых генератора (ЦУГ) и два блока совпадения (БС).
УУШД содержит два блока интегрирования (БИ), имеющих каждый два входа машинного и ручного управления и по одному выходу, два счетчика дешифратора (СД), имеющих по три выхода с сигналами последовательного переключения, шесть силовых ключей, генератор, управляемый напряжением (ГУН), устройство управления напряжением (УУН) и блок клавиатуры (БК).
Отличительными признаками изобретения являются механизм расширения сечения луча одного лазера, его конкретное выполнение и расположение его частей на каретке и портале; выполнение поверхности зеркал механизма расширения сечения луча сферическими; наличие у портала и каретки колесных пар конкретного выполнения; блок управления манипулятором, который содержит персональную ЭВМ, плату сопряжения и устройство управления двигателями.
Технический результат достигается путем соосного суммирования лучей двух лазеров и их фокусировки в разных точках по толщине реза.
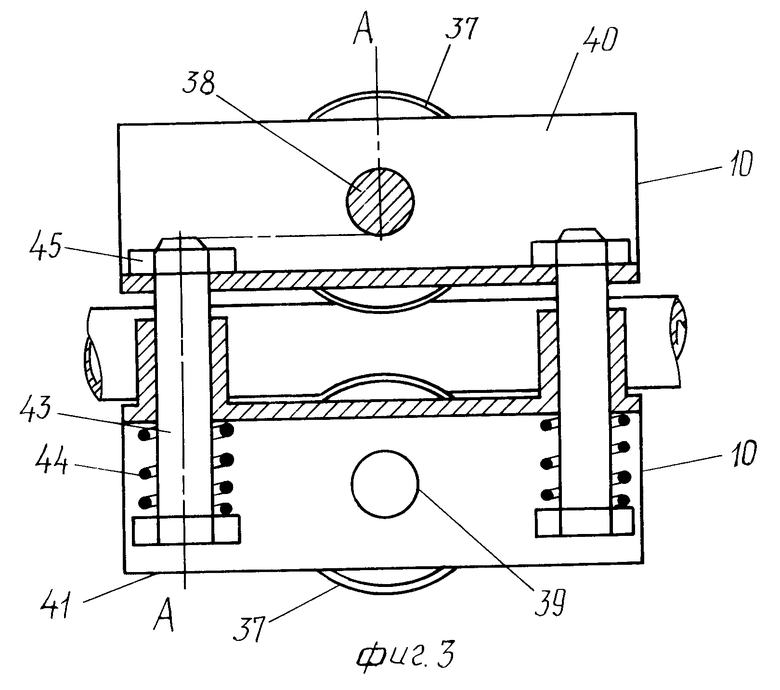
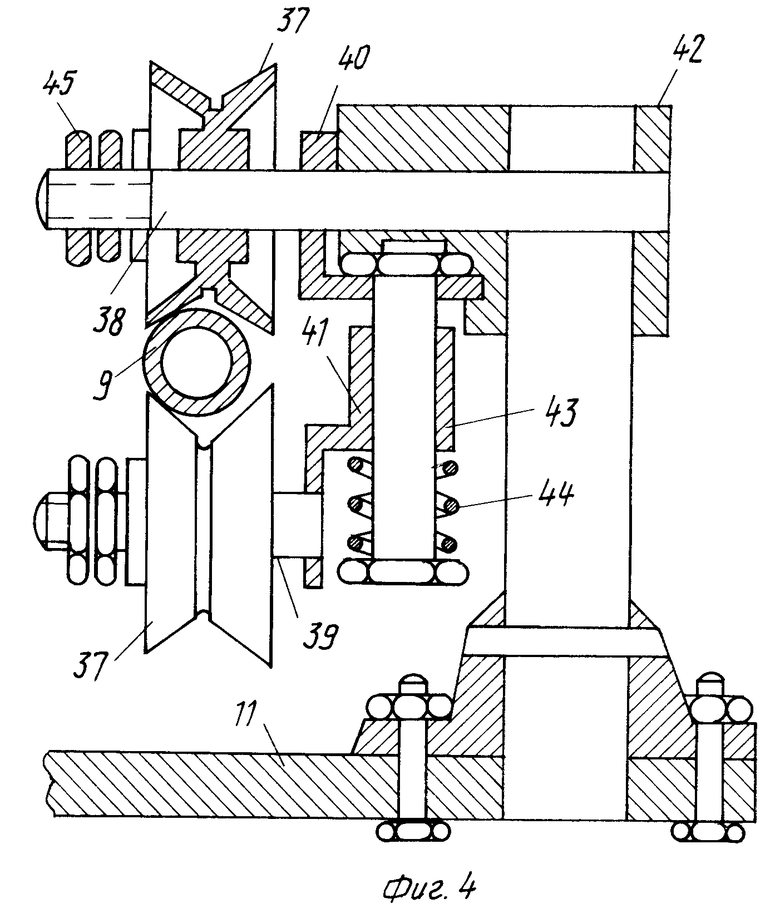
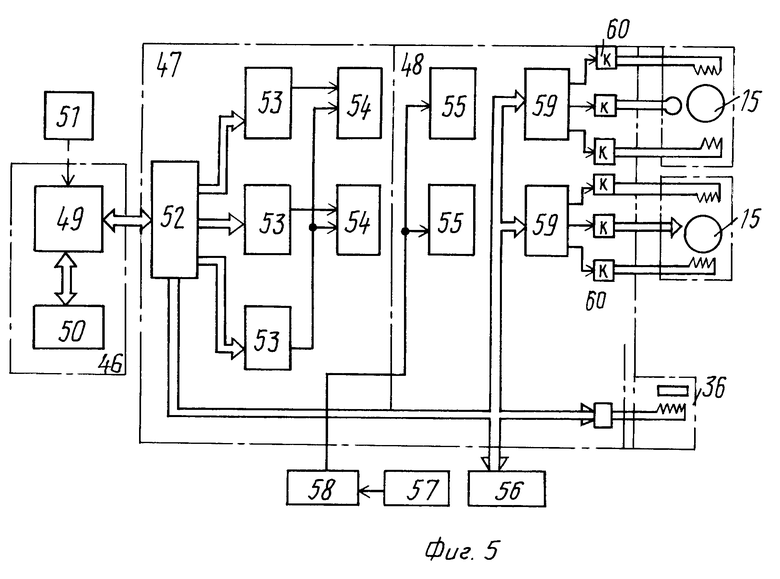
На фиг. 1 показана машина, вид сверху; на фиг.2 то же, вид спереди; на фиг. 3 то же, вид сбоку; на фиг.4 сечение А-А на фиг.3; на фиг.5 структурная схема блока управления манипулятором машины.
Лазерная машина для резки плоских заготовок содержит прямоугольную стальную станину 1, закрепленную на полу (фундаменте). На станине 1 закреплены в горизонтальной плоскости четыре домкрата 2 с одним приводом. На домкратах установлен решетчатый стол 3, на котором крепится заготовка 4 с помощью тисков 5. Не закрытая заготовкой часть поверхности стола покрыта резиновым ковриком 6. Нижняя часть станины 1 от стола до пола закрыта металлическим кожухом 7, в который вмонтирована труба 8 вытяжной вентиляции, предназначенной для отсоса продуктов резки из под стола во время резки.
На верхней части станины 1 и вдоль нее с двух сторон закреплены направляющие 9 из стальных труб. На них с помощью колесных пар 10 установлен портал 11 с приводом 12, тросом 13 и устройством 14 его натяжения. Привод 12 имеет шаговый двигатель (ШД) 15. ШД 15 служит для перемещения портала 11 вдоль направляющих 9. На портале 11 закреплены ортогонально его направляющим и в параллельной плоскости направляющие 16 каретки. На этих направляющих на колесных парах 17 установлена каретка 18, имеющая тросовый привод 19 и ШД 20. На каретке 18 закреплен резак 21, выполненный в виде полого усеченного конуса с закрепленной в нем соосно фокусирующей линзой 22. Рядом со станиной на столе закреплены два лазера 23 и 24. Оптические оси лазеров лежат в одной плоскости, параллельной поверхности стола 3 и направляющим портала 9. Перед лазером 24 установлен соосно его оптической оси механизм 25 расширения сечения луча лазера. Механизм 25 содержит суппорт 26 и два зеркала со сферическими рабочими поверхностями выпуклое 27 и вогнутое 28. Зеркала 27 и 28 установлены на суппорте 26 с возможностью взаимного перемещения вдоль оптической оси механизма 25. Вогнутое зеркало 28 имеет в центре отверстие диаметром, равным диаметру луча лазера 24. Механизм 25 расположен вогнутым зеркалом в сторону лазера 24.
На портале 11 закреплены два плоских зеркала 29 и 31. Зеркало 29 предназначено для переотражения падающего луча лазера 23 в направлении перпендикуляра к оптической оси фокусирующей линзы 22. Зеркало 31 в центре имеет отверстие, диаметр которого меньше диаметра выпуклого зеркала 27, но больше диаметра луча лазера 23. Служит зеркало 31 для переотражения расширенного луча лазера 24 в направлении перпендикуляра к оптической оси фокусирующей линзы 22. На каретке 18 над резаком 21 закреплено третье плоское зеркало 30, которое переотражает падающие на него соосно луч лазера 23 и расширенный луч лазера 24 вдоль оптической оси фокусирующей линзы 22 в направлении заготовки 4. Изменяя с помощью суппорта 26 расстояние между зеркалами 27 и 28 механизма 25, добиваются требуемой сходимости или расходимости расширенного луча лазера 24 с целью фокусировки лучей двух лазеров в разных точках вдоль оптической оси фокусирующей линзы 22. Лазеры охлаждают водопроводной водой, поступающей по трубе 32. Отработанная вода отводится по канализационной трубе 33. Электропитание лазеры получают от блоков 34 питания. Манипулятор машины имеет блок 35 управления. Лучи лазеров кратковременно прерываются заслонкой 36 с приводом, установленной перед лазерами 23 и 24.
Колесная пара 10 (фиг.3 и 4) содержит два ролика 37 опорный и прижимной. Ролики 37 имеют оси 38 и 39 и могут на них свободно вращаться. Оси роликов соединены с помощью уголков 40 и 41 и узла их крепления 42. Ось опорного ролика крепится к порталу 11 с помощью узла 43 крепления. Узел крепления 42 уголков 40 и 41 содержит два болта 43, две пружины 44, работающие на сжатие, и гайку 45.
Портал 11 (каретка 18) устанавливается на направляющих 9 (16) с помощью четырех колесных пар 10 с возможностью перемещения по ним. Ролики колесных пар 10 охватывают направляющие сверху и снизу. Пружины 44 выбирают люфты механической подвески портала (каретки). Ролики выполнены в форме блоков с канавками на ободах, причем канавки выполнены конусного сечения с прямолинейными образующими под тупым углом (более 90о).
Блок управления манипулятором машины (БУММ) 35 включает последовательно соединенные ПЭВМ 46, например IBM PC, плату сопряжения (ПС) 47, и устройство управления шаговыми двигателями (УУШД) 48 (фиг.5).
Микропроцессор (МП) 49 ПЭВМ 46 соединен с памятью 50 и программным обеспечением (ПО) 51. ПС 47 содержит интерфейсное устройство (ИФУ) 52, имеющее три выхода автоматического управления манипулятором и один ручной. ИФУ 52 реализовано на микросхемах (МС) 555 и 580 серий, на которых собраны буферные усилители, шины и схема дешифрации адреса. Кроме того, ПС 47 содержит три цифровых управляемых генератора (ЦУГ) 53 и два блока совпадения (БС) 54 с двумя входами, к первым входам подсоединены ЦУГ1 и ЦУГ2, а к вторым выход ЦУГ3. Выходы автоматического управления манипулятором ИФУ соединены с входами ЦУГ1, ЦУГ2 и ЦУГ3. ЦУГ 53 реализован на МС 580ВИ 53.
В процессе формирования управляющего сигнала участвуют два генератора ЦУГ1 и ЦУГ3. ЦУГ1 формирует программируемую частоту f1, а ЦУГ2 заданный программируемый интервал Т. На выходе БСI формируется пачка импульсов с частотой f1 и количеством N1, где
N1 f1˙T
ПЭВМ соединена с ПС посредством шины МIС.
Устройство управления шаговыми двигателями (УУШД) 48 содержит два блока интегрирования (БИ) 55, имеющих по два входа автоматических и ручного управления; два счетчика дешифратора 59, имеющих два входа автоматических и ручного управления и три выхода импульсов, задержанных на 1/4 периода один по отношению к другому (фиг.6), которые поступают на соответствующие обмотки ШД через силовые ключи 60; блок клавиатуры (БК) 56, устройство управления напряжением (УУН) 57 и генератор управляемого напряжением (ГУН) 58. БК 56 соединен с выходом ручного управления ИФУ 52, входами ручного управления СД1 и СД2, а также силовым ключом привода задвижки 36. Один из выходов БК соединен с УУН, а тот в свою очередь соединен с входом ГУН. Выход ГУН соединен с входами ручного управления БИ1 и БИ2 (фиг.5).
БУММ 35 функционирует следующим образом.
Программное обеспечение 51 считывает программно-командный блок 50 информации в память, откуда МП 49 считывает ее пошагово и выдает команды на ПС 47, которые поступают сначала на ИФУ 52, а через него на каждый ЦУГ 53 и на каждый из СД 59. Далее система представляет два идентичных канала. Рассмотрим принцип действия одного из них. ПС 47 вставляется в соответствующее гнездо ПЭВМ. В процессе формирования управляющего сигнала участвуют два генератора ЦУГ1 и ЦУГ3. При этом ЦУГ1 работает в режиме третьего таймера (МС 580ВИ53), и ЦУГ3 в режиме первого. Сформированная пачка импульсов с выхода БС1 поступает на вход автоматического управления СД1. С выхода СД1 сигнал поступает на силовые ключи 60, которыми управляются ШД 15.
Машина настраивается и работает следующим образом.
В ПЭВМ 46 вставляют дискету с программой обработки заготовки 4. Записывают программу в оперативную память ПЭВМ. С помощью блока клавиатуры переводят манипулятор в режим ручного управления. На стол 3 кладут заготовку 4, подлежащую резке и закрепляют ее с помощью тисков 5. Свободную от заготовки поверхность стола закрывают резиновым ковриком 6. Выходные отверстия лазеров 23 и 24 с помощью блока клавиатуры 56 закрывают заслонкой 36. Включают и прогревают лазеры. С помощью манипулятора и блока клавиатуры 56 выводят резак 21 на край заготовки 4. Открывают заслонку 36, фокусируют луч лазера 23 на поверхности заготовки с помощью фокусирующей линзы 22 и путем перемещения заготовки домкратами 2 вдоль оптической оси линзы. Отмечают на лимбе рукоятки управления домкратами положение стола 3. Перемещают стол вниз на 1/3 толщины заготовки. С помощью зеркал механизма расширения сечения луча фокусируют луч второго лазера (24) на поверхности заготовки. Домкратами возвращают заготовку в первоначальное положение. Переводят манипулятор в режим автоматического управления и начинают автоматически управлять резаком и резкой. После выполнения программы резки лучи лазеров перекрываются заслонкой.
Готовое изделие снимают со стола.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ СЛЮДЫ МЕТОДОМ ЛАЗЕРНОЙ РЕЗКИ | 2014 |
|
RU2601362C2 |
| УСТАНОВКА ДЛЯ ЛАЗЕРНОЙ ОБРАБОТКИ | 2002 |
|
RU2218255C1 |
| УСТРОЙСТВО ДЛЯ ФОКУСИРОВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2009 |
|
RU2413265C2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ВОЛОКОННЫМ ЛАЗЕРОМ ОБЪЕМНЫХ ДЕТАЛЕЙ | 2008 |
|
RU2386523C1 |
| СПОСОБ ЛАЗЕРНОЙ РЕЗКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2288084C1 |
| Способ лазерного сверления отверстий и устройство для его осуществления | 1990 |
|
SU1750900A1 |
| СПОСОБ ГИБРИДНОЙ ЛАЗЕРНО-ДУГОВОЙ СВАРКИ ТОЛСТОСТЕННЫХ ТРУБ БОЛЬШОГО ДИАМЕТРА ИЗ ВЫСОКОПРОЧНЫХ МАРОК СТАЛИ | 2018 |
|
RU2678110C1 |
| ПРИБОР ДЛЯ ФОТОЛЮМИНЕСЦЕНТНОГО КАРТОГРАФИРОВАНИЯ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН (ВАРИАНТЫ) | 2000 |
|
RU2172946C1 |
| СПОСОБ ЛАЗЕРНОЙ РЕЗКИ ХРУПКИХ НЕМЕТАЛЛИЧЕСКИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2528287C2 |
| Способ изготовления деталей из листовой металлической заготовки на лазерном станке с ЧПУ | 2022 |
|
RU2783722C1 |


Изобретение относится к лазерной сварке, в частноти к лазерным машинам для резки плоских заготовок, и может найти применение в различных отраслях машиностроения. Сущность изобретения: лазерная машина для резки содержит два лазера, стол для размещения заготовки, манипулятор перемещения резака во взаимноперпендикулярных направлениях, оптическую систему. Оптическая система машины содержит механизм расширения сечения луча, обеспечивающий управление сходимостью луча, соосное суммирование энергии лучей двух лазеров с минимальными потерями и фокусировку лучей в разных точках по глубине резки. Изобретение позволяет осуществлять резку толстых заготовок из дерева. 3 з.п. ф-лы, 5 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент США N 4707584, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
