Изобретение относится к радиационному приборостроению, а именно к управляемым импульсным рентгеновским приборам.
Известны способы измерения малых высот и рентгеновские высотомеры малых высот (ВМВ), разработанные в США и описанные в [1]
Измерение высоты в них основано на активной локации генератором поверхности отражения и приеме отраженного импульса сцинтилляционным детектором. Высотомеры содержат передатчик-генератор рентгеновских импульсов с трубкой триодного типа, приемник пластмассовый сцинтиллятор с быстрым ФЭУ и устройство для регулирования длительности и частоты следования импульсов.
Их недостатками являются: небольшой диапазон измеряемых высот, требование обязательной стабилизации тракта прием-передача по первичному излучению, а также зависимость от типа отражающей поверхности.
Наиболее близким по технической сущности к предлагаемым техническим решениям является способ измерения малых высот и устройство для его осуществления [2] Способ измерения малых высот основан на выделении максимума обратно рассеянных квантов, регистрируемых детектором. Для этого облучают поверхность отражателя рентгеновскими импульсами длительностью 10 нс, отраженные кванты регистрируют, усиливают их, а из импульсов зондирующего излучения формируют строб-импульсы длительностью по 10 нс, сдвинутые относительно друг друга на 15 нс. Далее определяют число отраженных рентгеновских квантов, пришедших за время действия строб-импульса, и выравнивают статистику квантов, рассеянных воздухом на различных расстояниях от детектора, регулируя уровень фоновых импульсов.
Одновременно определяют положение пары строб-импульсов на временной оси и максимум сигнала рентгеновского импульса от отражателя. При уменьшении этого сигнала останавливают стробы и меняют геометрию, т.е. расстояние до отражающей поверхности. Далее процесс измерения повторяют до получения максимума отраженного рентгеновского импульса в новой геометрии. Таким образом, в известном способе узкий строб, синхронизированный частотой работы рентгеновского генератора, последовательно "просматривают" локализованные объем воздуха и поверхность отражателя, идентифицируя кванты, рассеянные отражателем и воздухом.
Этот способ реализован в устройстве, описанном в /2/ и являющимся наиболее близким к предлагаемому техническому решению. Устройство содержит рентгеновский передатчик РП, состоящий из источника питания, модулятора и рентгеновской трубки, детектор (блок детектирования БД), соединенный с усилителем, к выходу которого подключены первые входы ключей К1 и К2. Устройство включает в себя также формирователь стробов, выходы которого подсоединены ко вторым входам ключей: на ключ К1 непосредственно, а на ключ К2 через линию задержки, вследствие чего строб-импульсы сдвинуты относительно друг друга на 15 нс. Таким образом, сигнал от формирователя стробов управляет обоими ключами, выходы которых соединены с интеграторами один и два соответственно. Выходы первого интегратора через параллельную цепочку из дискриминатора верхнего уровня и дискриминатора нижнего уровня, соединен с регулятором уровня, выход которого подключен к модулятору. Выход второго интегратора соединен с 1-ым входом схемы сравнения и через формирователь порога со вторым входом схемы сравнения.
Выход схемы сравнения соединен с генератором пилообразного напряжения, подключенным к первому входу регулируемой линии задержки, второй вход которой соединен с модулятором, а выход с формирователем строба.
Недостатками известных способа и устройства являются:
значительная вероятность пропуска поверхности отражателя;
вероятность срыва сопровождения поверхности отражателя, приводящая к необходимости повторного "просмотра" всего диапазона измерений;
невысокая точность измерения высоты из-за систематической ошибки, связанной с формой отраженного сигнала, поскольку выделение максимума пика этого сигнала и "просмотр" поверхности отражателя осуществляется с помощью только одного строба, в котором положение центра тяжести максимума пика отраженного сигнала не соответствует значению высоты, которая связана с фронтом этого пика отраженного сигнала.
Целью предлагаемых технических решений является устранение указанных недостатков с помощью новой схемы динамического стробирования, исключающей пропуск информации и повышающей точность измерения высоты. Кроме этого предлагаемые решения дают возможность получить дополнительную информацию о мгновенном значении вертикальной скорости (скорости изменения высоты).
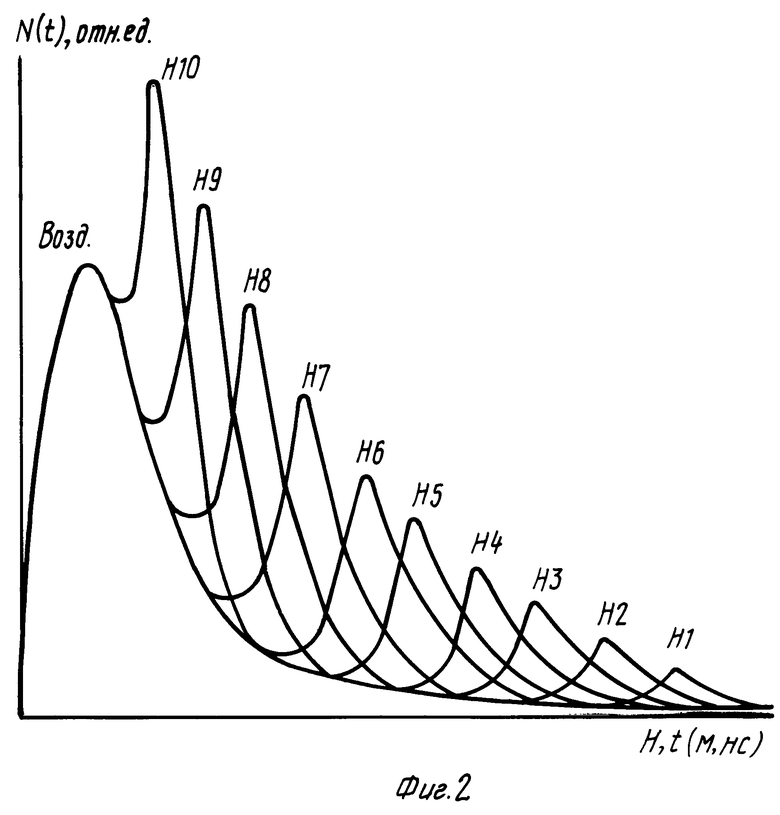
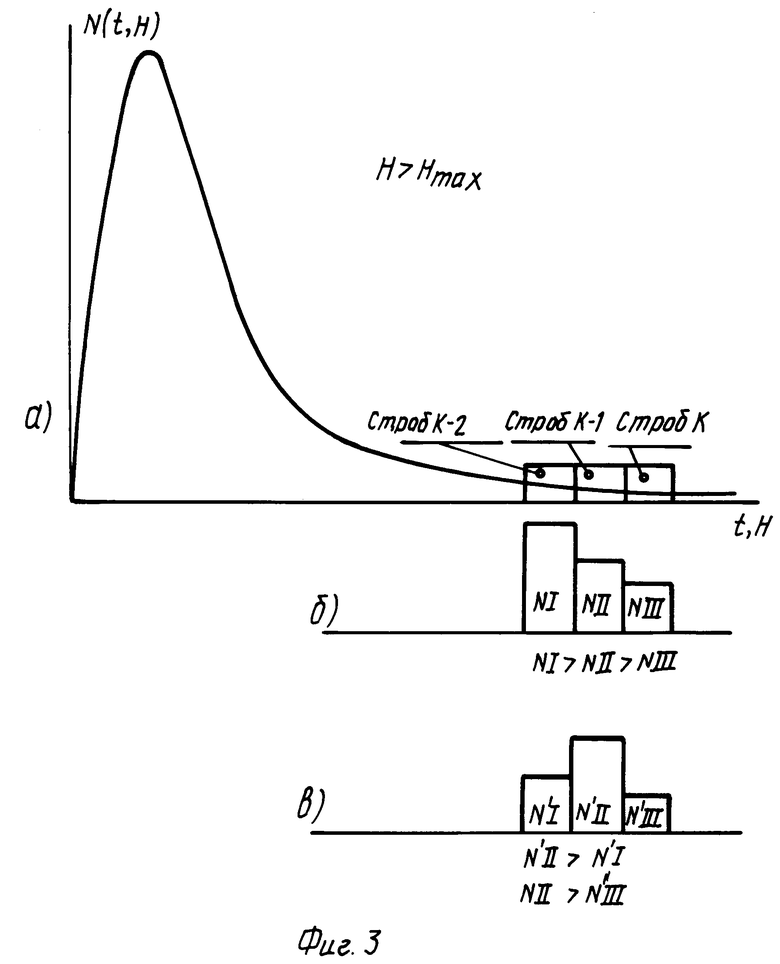
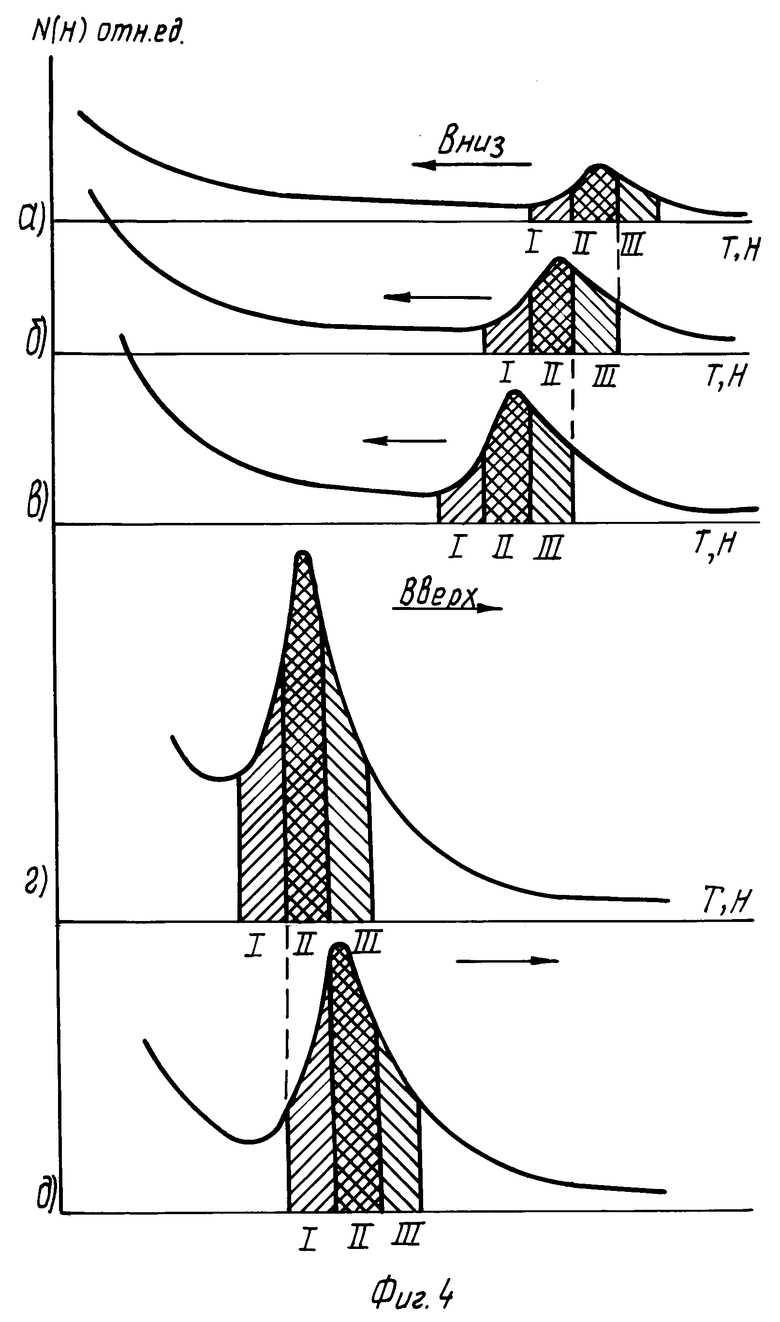
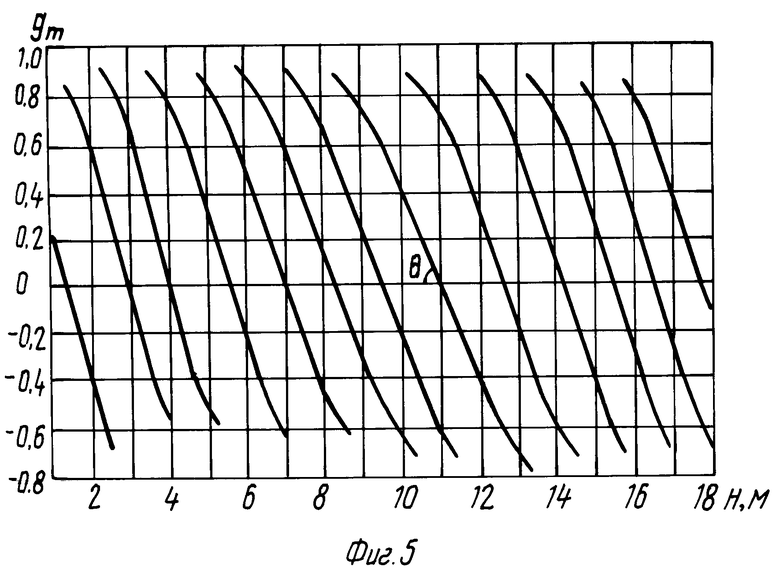
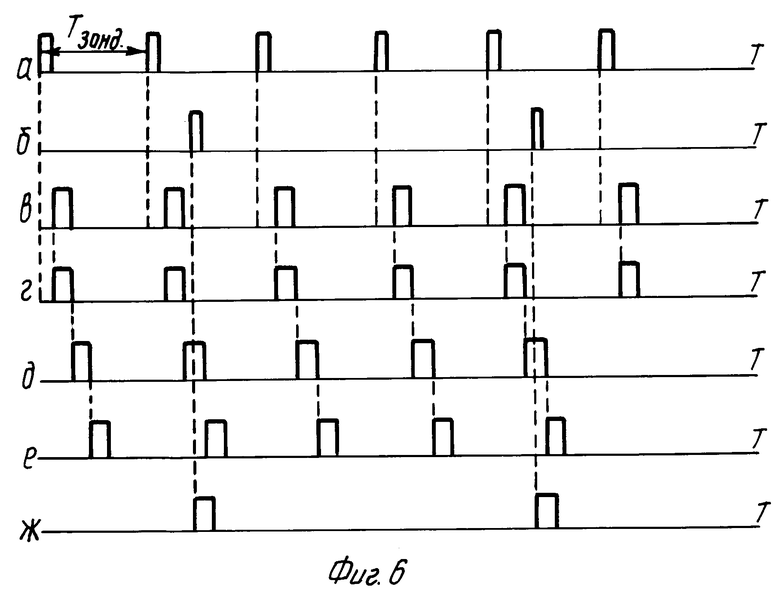
На фиг.1 представлена структурная электрическая схема устройства, реализующего предложенный способ; на фиг.2 временные спектры отраженного излучения для десяти различных высот в области малых высот; на фиг.3а схематично приведены три строба информационной гребенки с зарегистрированным количеством отраженных импульсов NII, NIII на верхней границе диапазона измеряемых высот N1; на фиг.3,б гистограмма счета NI, NII, NIII, на фиг.3,в гистограмма счета с учетом весовых коэффициентов KI, KII, KIII; на фиг.4 временные спектры отраженного излучения для разных высот, три строба информационной гребенки и соотношения счета в стробах, смещение информационной гребенки при движении вниз 4,а, б, в и вверх 4г, д; на фиг.5 калибровочная кривая "gm" и угол ее наклона Θ на фиг.6 временные диаграммы, поясняющие работу устройства.
Устройство (фиг.1) содержит рентгеновский передатчик 1, блок 2 детектирования, формирователь строба 3, управляемую линию задержки 4, многоотводную линию задержки 5, три схемы совпадения 6, 7, 8, три счетчика 9, 10, 11 и вычислитель 12.
Предлагаемый способ измерения малых высот заключается в том, что с помощью рентгеновского передатчика облучают поверхность отражателя импульсами зондирующего излучения с фиксированной частотой следования и длительностью τ Отраженные окружающей средой (воздухом) и поверхностью отражателя рентгеновские кванты регистрируют сцинтилляционным блоком детектирования. Временной спектр этих отраженных квантов на разных высотах представлен на фиг.2. Формируют стробы одинаковой длительности и определяют их положение на временной оси. Три строба I, II, III, прилегающих друг к другу (см. фиг.3), жестко привязанные к моменту испускания зондирующего импульса и несущие информацию о высоте, объединяют в информационную гребенку. По положению информационной гребенки на временной оси следят за направлением движения относительно поверхности отражателя и дискретно сдвигают ее в ту или другую сторону по оси, на время, равное длительности одного строба τстр
В каждом из трех стробов регистрируют количество отраженных квантов: NI, NII, NIII (см. фиг.3,а).
На высотах, превышающих верхний предел измерения высоты, Н > Нмах, где отсутствует полезный сигнал и регистрируются только кванты, отраженные от воздуха, выполняется соотношение
NI > NII > NIII (фиг.3,б) т.е. максимальное количество импульсов накапливается во II-ом стробе. Чтобы придать устойчивость системе измерения, значения NI, NII и NIIIдомножают на фиксированные весовые коэффициента KI, KII, KIII. Коэффициенты подбирают так, чтобы на верхней границе диапазона измерения высоты (фиг.3,а) с вероятностью не ниже заданной, выполнялось соотношение
KII NII > KI NI или NIII' > NI'
KII NII > KIII NIII или NII' > NIII', где NI' KI ˙NI; NII' KII ˙NII ˙NIII' KIII ˙NIII (см. фиг.3,в), очевидно, KII > KI и KII > KIII
Таким образом, на высотах, лежащих за пределом верхней границы диапазона измерения, приведенный максимум пика отраженного сигнала находится во II-ом стробе.
В случае движения к поверхности отражателя (вниз) максимум пика отраженного сигнала смещается в область 1-ого строба (фиг.4). После того, как центр тяжести максимума пика перейдет границу II-ого и I-ого стробов, установится соотношение
NII' < NI'
Это соотношение служит сигналом, по которому сдвигают информационную гребенку в сторону меньших высот на время, равное длительности одного строба информационной гребенки τстр Поэтому III-ый строб как бы "исчезает", II-ой становится III-им, I-й становится II-ым и вновь появляется новый I-й строб (фиг. 4, а, б). При этом вновь выполняются соотношения NII' > NI' и NII' > NIII'. При дальнейшем движении вниз максимум пика отраженного сигнала будет перемещаться в стробы информационной гребенки с меньшими номерами и тогда вновь сдвигают гребенку на время, равное длительности одного строба, в сторону меньших высот (фиг.4в).
При необходимости движения вверх максимум пика отраженного сигнала из области II-ого строба будет сдвигаться в область III-его строба. При этом после прохождения центром тяжести максимума пика границы второго и третьего стробов произойдет изменение соотношения счета и установится соотношение NII' < NIII'. По этому сигналу сдвигают гребенку в область больших высот, тогда I-й строб "исчезает", II-ой строб станет I-ым, а III-ий станет II-ым, вновь появится новый третий строб и, тогда соотношение NII' < NIII' станет NI' < NII', a NII' > NIII' (фиг.4,г,д).
Из вышесказанного ясно, что при любом направлении движения (вверх или вниз) максимум пика отраженного сигнала всегда будет находиться во II-ом (центральном) стробе информационной гребенки, который и является носителем информации о высоте. Числовое значение высоты определяют по временному положению II-ого строба информационной гребенки относительно синхроимпульса рентгеновского передатчика. Для этого весь диапазон высот (от 0 до 30-50 м) разбивают на "виртуальные" стробы от 1 до К номеров. Любое положение стробов информационной гребенки на шкале "виртуальных" стробов имеет определенный номер: от 1 на нижней границе диапазона до "К" на верхней, т.е. 1,2,3.(m-1), m, (m+1).(K-2),(K-1)K.
Начальное положение стробов информационной гребенки имеет максимальные порядковые номера (К-2) (К-1)К (фиг.2,а).
Когда информационную гребенку сдвигают, то порядковые номера на шкале виртуальных стробов уменьшаются. Отслеживают на шкале виртуальных стробов три постоянно функционирующих строба, несущих информацию о высоте, т.е. информационную гребенку с максимумом пика отраженного сигнала во II-ом стробе и замечают номер этого строба на шкале вируальных стробов, например m. Строб с этим номером отстоит от момента излучения зондирующего импульса на время (m-1) τстр что соответствует высоте:
H  где С скорость света.
где С скорость света.
Для более точного определения высоты, считают количество импульсов, накопленных за такт накопления в m-ном стробе Nm и в соседнем, прилагающем стробе m+1-Nm+1, домножают их на поправочные коэффициенты Km, Km+1 и получают Nm' и Nm+1'. Значение высоты Н' определяют по формуле H' H˙ qm tgΘ
H′  +
+  tgθ где Θ угол наклона калибровочной кривой qm;
tgθ где Θ угол наклона калибровочной кривой qm;
qm калибровочная кривая
qm= 
qm= 
(фиг.5)
Калибровочная кривая в пределах длительности одного строба имеет линейную зависимость. Кривую снимают экспериментально. При этом целесообразно середину m-го настроечного строба размещать под границей m-го и m+1-го "виртуальных" стробов.
С помощью предлагаемого способа измеряют так же и мгновенное значение вертикальной скорости (скорость изменения высоты) VV по формуле
по формуле
V
 где H(to) и H(to + τнак ) соседние значения измеренной высоты, отстоящие друг от друга по времени на такт накопления τнак
где H(to) и H(to + τнак ) соседние значения измеренной высоты, отстоящие друг от друга по времени на такт накопления τнак
Устройство работает следующим образом.
Рентгеновский радиопередатчик 1 облучает наносекундными зондирующими импульсами поверхность отражения с заданной частотой (Т зонд) (фиг.6,а). Отраженные от поверхности и близлежащих слоев воздуха кванты регистрирует в блоке 2 (фиг. 6,б). Синхроимпульс передатчика 1, жестко привязанный к моменту испускания импульса рентгеновского излучения, запускает формирователь 3 строба (фиг.6,в), строб-импульс которого через линию задержки 4 поступает на линию задержки 5, где формируется гребенка из трех, примыкающих друг к другу, стробов одинаковой длительности и жестко привязанных к моменту испускания синхроимпульса передатчика (фиг.6,г, д, е). Стробы поступают на первые входы схем совпадения 6, 7, 8, на вторые входы которых поступают импульсы с блока 2. В схемах совпадений 6, 7, 8 происходит временная селекция импульсов, которые обусловлены зарегистрированными блоком 2 отраженными рентгеновскими квантами. Счетчики 9, 10, 11, подключенные к выходам схем совпадений 6, 7, 8 подсчитывают зарегистрированные в стробах импульсы. Вычислитель 12 управляет работой устройства: опрашивает и очищает счетчики 9, 10, 11, открывает их входы на такт накопления, осуществляет обработку накопленной информации. В зависимости от полученного результата вычислитель осуществляет управление линией задержки ЛЗ, 4, которая сдвигает информационную гребенку стробов относительно синхроимпульса передатчика 1 на время, равное длительности одного строба τстр по направлению движения. Вычислитель 12 выдает информацию о текущей координате H' и мгновенном значении вертикальной составляющей скоростей VV В предлагаемом устройстве малых высот модулятор передатчика 1 обеспечивает его работу в импульсном режиме с частотой следования зондирующих импульсов 1 МГц и длительностью не более 10 нс на половине амплитуды интенсивности, при этом квантовый выход РП составляет 1012-1013 квантов в секунду, их средняя энергия 60 кэВ, максимальная до 100-120 кэВ. Диаграмма направленности передатчика 2Ψ 80о.
В предлагаемом устройстве малых высот модулятор передатчика 1 обеспечивает его работу в импульсном режиме с частотой следования зондирующих импульсов 1 МГц и длительностью не более 10 нс на половине амплитуды интенсивности, при этом квантовый выход РП составляет 1012-1013 квантов в секунду, их средняя энергия 60 кэВ, максимальная до 100-120 кэВ. Диаграмма направленности передатчика 2Ψ 80о.
Импульсы, прошедшие схемы совпадений, поступают на программируемые таймеры. После накопления за заданный временный интервал (такт накопления) величина, соответствующая количеству пришедших импульсов, вводится в микропроцессорную системную по трем независимым каналам. Работой вычислителя управляет микропроцессор. По программе, записанной в ПЗУ, проводятся необходимые вычисления с выходными величинами. В зависимости от результата вычислений выдача команд управления линией задержки осуществляется через программируемый параллельный адаптер. Через него же передается информация о высоте и скорости в контур управления, либо на дисплей или иное устройство. Такт накопления информации устанавливается в зависимости от требований, предъявляемых к точности измерения высоты и скорости, и составляет 10-50 мс. Обусловлено это тем, что при заходе на посадку самолеты, космические аппараты и др. имеют, как правило, скорость 1-2, реже 3-5 м/с.
Измерение вертикальной скорости позволяет свести к минимуму динамическую ошибку измерения высоты. Характеристики устройства позволяют за такт накопления собрать достаточную статистику для реализации предложенного алгоритма без просчетов. Текущие значения данных, а также промежуточные результаты вычислений хранятся в ОЗУ. Синхронизация работы всех составных частей вычислителя осуществляется с помощью генератора. Системный контроллер шин данных и управления вырабатывает сигналы, управляющие работой составных частей вычислителя, а также повышает нагрузочную способность системной шины данных.
Кроме исключения динамической ошибки измерения высоты, устройство позволяет получать непрерывную информацию о высоте, так как сбой в работе устройства исключен за счет использования сдвигаемой, в зависимости от направления, трехстробной информационной гребенки. Более высокая точность измерения достигается также за счет исключения ошибки, связанной с положением максимума пика отраженного сигнала внутри второго строба информационной гребенки, которую учитывает поправочный член калибровочной кривой. Дополнительное преимущество устройства заключается в возможности измерения мгновенного значения вертикальной составляющей скорости движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАЛЫХ ВЫСОТ И РЕНТГЕНОВСКИЙ ВЫСОТОМЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2236024C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БОЛЬШИХ ВЫСОТ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОЛЬШИХ ВЫСОТ | 1993 |
|
RU2072530C1 |
| ВЫСОТОМЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2253880C1 |
| СПОСОБ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО МНОГОФУНКЦИОНАЛЬНОЙ РЕНТГЕНОВСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2772687C1 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2282211C2 |
| СПОСОБ КОГЕРЕНТНОГО НАКОПЛЕНИЯ РАДИОИМПУЛЬСОВ | 2003 |
|
RU2293347C2 |
| МОДАЛЬНЫЙ ДАЛЬНОМЕР ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2277714C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА РАДИОСВЯЗИ ОТ РАДИОНАВОДИМОГО ВЫСОКОТОЧНОГО ОРУЖИЯ И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2516265C2 |
| СПОСОБ ГАММА-СПЕКТРОМЕТРИИ | 1997 |
|
RU2159451C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
Использование: радиационное приборостроение. Сущность изобретения: способ измерения малых высот заключается в том, что поверхность отражателя облучают импульсами с фиксированной частотой следования и длительностью τ, отраженные сигналы регистрируют, формируют стробы равной длительности и определяют их положение на временной оси, формируют информационную гребенку из трех однотипных стробов, прилегающих друг к другу, по положению на временной оси максимума отраженного сигнала следят за направлением движения и дискретно сдвигают гребенку в ту или другую сторону по оси времени на время, равное длительности строба, диапазон высот разбивают на виртуальные стробы, подсчитывают количество импульсов за такт накопления в m-ом и в m+1-ом стробе гребенки, умножают на весовые коэффициенты и вычисляют значение высоты. Устройство содержит один рентгеновский передатчик 1, один блок детектирования 2, один формирователь строба 3, две линии задержки 4,5, три схемы совпадений 6,7,8, три счетчика 9,10,11 и один вычислитель 12. 2 с.п. ф-лы, 6 ил.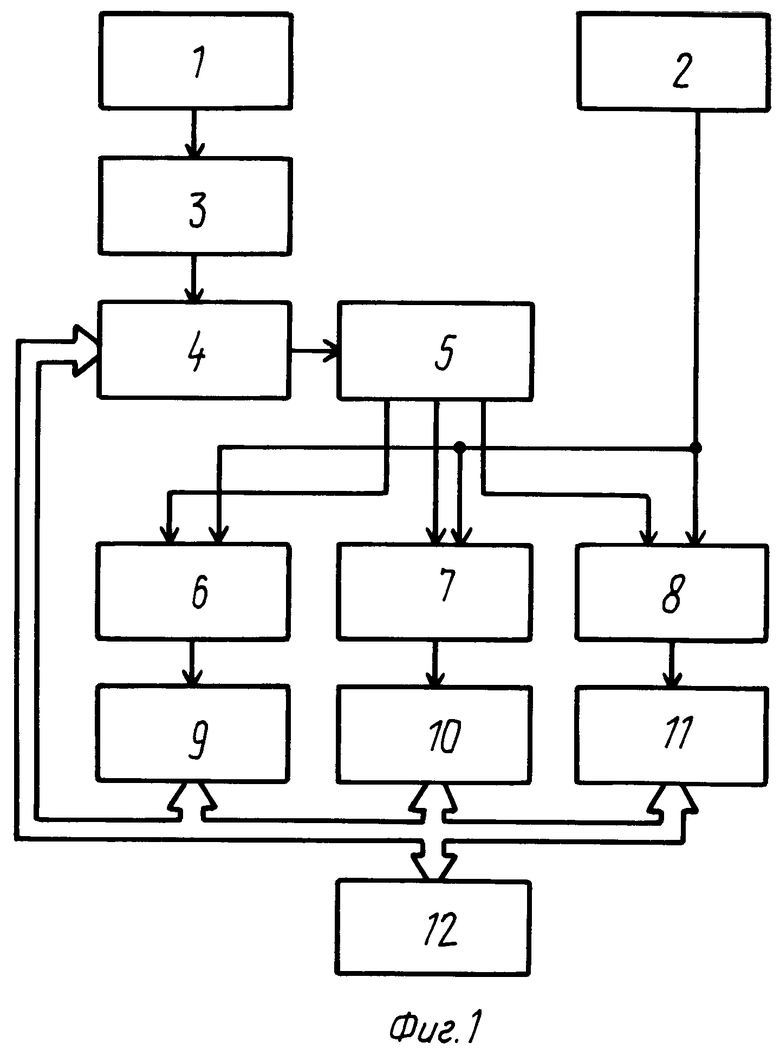

где tgθm тангенс угла наклона экспериментально полученных калибровочных кривых, связывающих изменение числа накопленных импульсов, в двух соседних стробах информационной гребенкой m и m + 1 с изменением дальности до отражателя.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Герчиков Ф.Л | |||
| Управляемое импульсное рентгеновское излучение в приборостроении | |||
| Энергоатом издат | |||
| М., 1987, с.57-58. | |||
