Изобретение относится к способу навигации подвижных объектов и устройству многофункциональной рентгеновской навигационной системы (МРНС), реализующему этот способ. При этом в качестве подвижного объекта могут выступать летательные и космические аппараты, надводные суда, наземные транспортные средства, строительные и военные машины, подвижные роботы и другие объекты.
Известны оптические системы навигации и посадки, основанные на измерении координат оптического изображения объектов на местности и в пространстве, оптических реперов (маяков, мишеней) или оптических лучей (секторов, трасс).
Лазерные системы навигации используют дополнительную информацию о дальности по времени распространения импульсного или непрерывного лазерного излучения, а также используются для подсветки объектов в оптических системах (патенты: RU 2317233 «Оптическая система посадки летательных аппаратов на палубу корабля», пр. от 28.02.2008; RU 2550907 «Способ посадки воздушного судна с помощью ультрафиолетовых приемников и излучателей (2 варианта)», пр. от 27.04.2015; RU 2575554 «Лазерная система посадки летательных аппаратов», пр. от 20.02.2016).
Оптические системы навигации и посадки обеспечивают:
- высокую точность измерений;
- возможность так называемой «пассивной» навигации по изображениям объектов на основе их отраженного (рассеянного) или собственного оптического излучения;
- дальность навигации, например, по звездам, ограничена только условиями распространения оптического излучения.
К недостаткам оптических, в том числе лазерных систем относятся:
- затруднение навигации и посадки в сложных метеоусловиях, в том числе в сильный дождь, снегопад (метель, снежную бурю);
- существенное снижение надежности навигации и посадки в условиях пыльной бури, сильного задымления, пожаров и песчаных бурь;
- существенное затруднение посадки при наличии облаков пыли или снега, создаваемых вертолетами, особенно при посадке в группе, а также дымы из труб корабля при посадке на палубу.
Известны радиотехнические, в том числе спутниковые системы навигации и посадки, использующие методы измерения направления и времени распространения радиоволн, излучаемых или отражаемых (рассеиваемых) объектами на местности и в пространстве. Выбором длины волны и способа кодирования радиоизлучения определяются основные параметры навигационных систем, в том числе точность определения положения и ориентации объектов, а также дальность действия и степень устойчивости к условиям распространения радиоизлучения (патенты: RU 2606240 «Навигация относительно площадки с использованием измерений расстояния», пр. от 13.07.2012, RU 2608183 «Многопозиционная система посадки воздушных судов», пр. от 17.11.2015, RU 2287838 «Система высокоточной автоматической посадки летательных аппаратов», пр. от 20.11.2006).
Радиотехнические навигационные системы посадки, по сравнению с оптическими (лазерными) системами, имеют:
- существенно меньшую зависимость от погодных условий и защищенность от оптических помех в зоне расположения объектов;
- возможность навигации, локации и связи при отсутствии прямой оптической видимости объектов, например, за счет огибания препятствий радиоволнами;
- возможность работы через радиопрозрачные (оптически непрозрачные) преграды, стены зданий, корпуса летательных аппаратов, листву деревьев;
- радиоизлучение способно проникать на десятки метров под землю (георадары).
К недостаткам радиотехнических навигационных систем и систем обеспечения посадки следует отнести:
- сложность обработки радиосигнала при наличии зеркальных отражений от водной поверхности и элементов конструкции корабля (посадочной платформы);
- существенное снижение надежности в условиях пассивных и активных помех;
- затруднена работа через плазму, при ионизации атмосферы во время полярных сияний и грозы, полете в ионосфере;
- невозможность работы через металлическую обшивку (конструкцию) летательного аппарата, в том числе для защиты от внешних воздействий:
- необходимость использования дублирующей системы в условиях режима «радиомолчания» (запрета на радиоизлучение).
Известны системы навигации и посадки на основе использования рентгеновского излучения. Известен «Способ измерения малых высот и устройство для его осуществления» по патенту RU 2236024. Способ заключается в том, что поверхность отражателя облучают импульсами рентгеновского излучения с фиксированной частотой и длительностью, обратно рассеянное излучение регистрируют.
Для получения временного спектра и его анализа перекрывают весь диапазон определяемых высот стробами одинаковой длительности, привязывают их к временной оси и в каждом стробе подсчитывают количество зарегистрированных импульсов N1, N2, …, Nk за такт накопления. Предварительно вычисляют пороговые значения n пор 1, n пор 2, …, n пор k и сравнивают количество импульсов в каждом стробе с соответствующим пороговым значением. По максимальному превышению выявляют номер строба m, в котором находится максимум сигнала.
Вычисляют функционал Gm по формуле Gm=(Nm+1-Nm)/(Nm+1+Nm), где Nm и Nm+1 - число накопленных импульсов в стробах с порядковыми номерами m и m+1 соответственно, и определяют значение высоты, т.е. на предварительно построенной калибровочной кривой gm находят точку, соответствующую численному значению функционала Gm (ординате), а ее абсцисса будет показывать искомое значение высоты, при этом рентгеновский высотомер, реализующий способ, содержит рентгеновский передатчик, блок детектирования, формирователь стробов, многоотводную линию задержки, к схем совпадений, к счетчиков и вычислитель, соединенных определенным образом.
В высотомере может быть дополнительно установлен управляемый задающий генератор, который соединяется с вычислителем высоты и рентгеновским передатчиком.
Способ и устройство обеспечивают измерение высоты полета летательного аппарата путем измерения общего времени распространения импульса рентгеновского излучения от рентгеновского передатчика до подстилающей поверхности и времени распространения обратно рассеянного импульса рентгеновского излучения от подстилающей поверхности до блока детектирования. Применение описанного изобретения обеспечивает повышенную точность и надежность измерения высоты с использованием набора стробов с калибровочными характеристиками.
Данный патент RU 2236024 является одним из двух, наиболее близких технических решений к заявляемому способу и устройству.
К недостаткам способа по патенту RU 2236024 относятся:
- малый диапазон измеряемых высот, обусловленный слабым уровнем обратно рассеянного рентгеновского излучения;
- высокий уровень рентгеновского излучения, создающий опасность для персонала как на борту подвижного объекта, так и находящегося в зоне полета и посадки подвижного объекта;
- ограниченность функций, отсутствует возможность передачи информации, в том числе навигационной, с борта подвижного объекта на посадочную платформу, а также дополнительного контроля высоты подвижного объекта средствами платформы с целью повышения безопасности посадки.
Известна также рентгеновская система и метод связи со спускаемым космическим аппаратом (патент US 3404278 пр. от 12.11.1963 г.), заключающаяся в излучении модулированного рентгеновского излучения рентгеновским передатчиком в направлении поверхности Земли (планеты), регистрации модулированного рентгеновского излучения одним или несколькими детекторами и ретрансляции принятого сигнала другими средствами связи. Предусмотрено размещение ряда детекторов рентгеновского излучения вокруг планируемой зоны посадки космического аппарата.
Достоинством этого метода и системы связи является возможность передачи информации через ионизированную среду (плазму), возникающую вокруг космического аппарата при его торможении в атмосфере.
К недостаткам технических решений по патенту US 3404278 является использование рентгеновского канала связи только от космического аппарата на наземные (напланетные) станции без обратной передачи информации на борт космического аппарата. Также в предложенном методе и системе связи не используется возможность измерения высоты космического аппарата над поверхностью Земли (планеты), например, по интенсивности принимаемого рентгеновского излучения.
Известна навигационная система и метод, использующий источники излучения пульсаров (патент US 7197381 пр. от 08.12.2003) в соответствии с которым навигационная система космического аппарата оснащается детектором рентгеновского излучения пульсаров. Сигнал излучения пульсаров синхронизируется с таймером, который измеряет время прихода сигнала к детектору и сравнивает его с исходным сигналом по известной заранее его форме. Вычислитель рассчитывает время запаздывания между временем регистрации рентгеновских импульсов детектором с расчетным временем прихода импульсного сигнала от пульсара в барицентр Солнечной системы (SSBC).
Расположение и профиль импульсного сигнала пульсара запоминается в цифровой памяти и используется для определения навигационных параметров космического аппарата по известным расположениям пульсаров. Скорость, высота околоземной орбиты и фактическое время в точке расположения космического аппарата вычисляется относительно барицентра SSBC.
Основными преимуществами метода и навигационной системы космического аппарата по патенту US 7197381 является:
- использование естественных источников излучения в отличие от GPS метода, требующего вывода на геостационарные орбиты определенного количества космических аппаратов в качестве опорных источников радиоизлучения;
- отсутствие влияния ионосферы и потоков солнечного излучения, в том числе в периоды солнечной активности;
- повышенная точность навигации в дальнем Космосе по сравнению с известными радиотехническими средствами;
- обеспечение автономной навигации в дальнем Космосе.
К ограничениям данного метода и системы навигации относятся:
- невозможность определения углов ориентации космического аппарата в пространстве;
- поглощение рентгеновского излучения пульсаров атмосферой, навигация по рентгеновским пульсарам возможна только вне атмосферы Земли и планет;
- недостаточная точность (в настоящее время порядка нескольких километров) для обеспечения посадки летательных аппаратов и космических аппаратов.
Наиболее близким техническим решением к заявляемому является «Комбинированная рентгеновская система связи и измерения дальности» [7], которая основана на использовании двусторонней (дуплексной) системы связи между космическим аппаратом и космической станцией.
Измерение расстояния (дальности) между космическим аппаратом и космической станцией выполняется путем измерения суммарного времени распространения импульсного рентгеновского излучения между источником рентгеновского излучения космического аппарата и блоком детектирования космической станции, а также между источником рентгеновского излучения космической станции и блоком детектирования космического аппарата.
Блоки обработки информации передают выходную информацию на устройства отображения соответственно. Входная информация от информационных устройств через блоки управления передаются на источники рентгеновского излучения соответственно.
Дуплексная передача информации между космическим аппаратом и космической станцией выполняется с использованием специального кодирования рентгеновского излучения, а также дополнительной поляризационной модуляции.
Обеспечиваются:
- повышенная дальность благодаря использованию прямого рентгеновского излучения в двух каналах связи;
- сочетание функций связи и измерения дальности;
- высокая помехозащищенность и устойчивость к внешним условиям благодаря использованию только рентгеновского вида излучения без необходимости применения радиотехнических и оптических средств.
К недостаткам системы следует отнести:
- высокий уровень нерегулируемого рентгеновского излучения, создающий опасность для персонала, как на борту космического аппарата и космической станции, так и находящегося в зоне полета космического аппарата и космической станции;
- не обеспечивается возможность измерения углов ориентации космического аппарата относительно космической станции, а также углового положения космической станции относительно космического аппарата;
- нет возможности получения навигационной информации, в том числе о дальности, на борту космической станции для повышения надежности и безопасности взаимной навигации;
- не предусмотрено угловое сканирование направлением диаграммы рентгеновского излучения для поиска и взаимного наведения космического аппарата и космической станции;
- не предусмотрено размещение аппаратуры в подвесных (мобильных) контейнерах для возможности оперативной установки при различных условиях эксплуатации;
- не предусмотрена возможность измерения расстояния по обратно рассеянному рентгеновскому излучению на малых дальностях (высотах).
Решаемая техническая задача заявленного изобретения заключается в существенном увеличении измеряемой высоты (наклонной дальности) подвижного объекта относительно платформы, снижение уровня рентгеновского излучения и повышение безопасности персонала.
Для решения указанной задачи предложен Способ навигации подвижных объектов, который заключается в формировании на борту подвижного объекта источника рентгеновского излучения, направленного в сторону платформы, регистрации рентгеновского излучения одним или несколькими блоками детектирования, расположенными на платформе, и последующей обработке сигналов блоков детектирования в блоке обработки информации платформы.
С целью повышения дальности, снижения уровня рентгеновского излучения и обеспечения передачи информации с платформы на подвижный объект, выходной сигнал блока обработки информации платформы передается на подвижный объект с помощью рентгеновского канала связи, реализуемого путем формирования рентгеновского излучения источника рентгеновского излучения платформы, направленного в сторону подвижного объекта, приема рентгеновского излучения одним или несколькими блоками детектирования на борту подвижного объекта, последующей обработки сигналов в блоке обработки информации подвижного объекта, причем в качестве опорного сигнала для измерений дальности и углов ориентации используется сигнал блока управления источника рентгеновского излучения подвижного объекта.
В результате на выходе блока обработки информации подвижного объекта формируется навигационная информация о дальности и углах взаимной ориентации подвижного объекта относительно платформы, отображаемая на устройстве отображения и передаваемая в систему управления подвижного объекта.
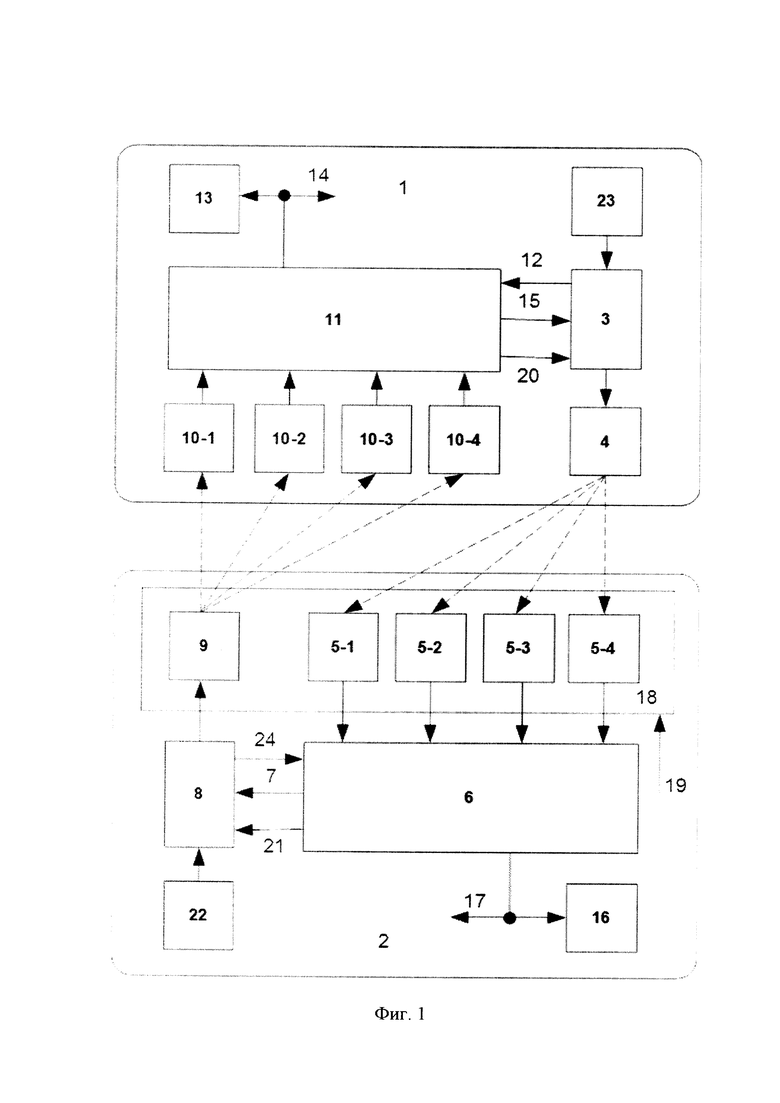
Многофункциональная рентгеновская навигационная система (представлена на фиг. 1), реализующая способ навигации подвижного объекта 1 относительно платформы 2, содержит на борту подвижного объекта 1 блок управления 3, выход которого подключен к входу управления источника рентгеновского излучения 4, рентгеновское излучение которого направлено в сторону платформы 2 и регистрируется одним или несколькими блоками детектирования 5 (5-1…5-4), размещенными на платформе 2, выходы блоков детектирования 5 платформы 2 соединены с входами блока обработки информации 6 платформы 2.
С целью повышения дальности, снижения уровня рентгеновского излучения и обеспечения передачи информации с платформы 2 на борт подвижного объекта 1, информационный выход 7 блока обработки информации 6 платформы 2 соединен с входом блока управления 8 источника рентгеновского излучения 9 платформы 2, рентгеновское излучение которого направлено в сторону подвижного объекта 1 и регистрируется одним или несколькими блоками детектирования 10 (10-1…10-4) подвижного объекта 1, выходы которых соединены со входами блока обработки информации 11 подвижного объекта 1, причем вход синхронизации блока обработки информации 11 соединен с выходом сигнала синхронизации 12 блока управления 3 источника рентгеновского излучения 4 подвижного объекта, а выход навигационной информации блока обработки информации 11 подвижного объекта 1 соединен с входом устройства отображения 13 подвижного объекта 1, а также с информационным выходом 14 для соединения со входом системы управления подвижного объекта 1.
С целью передачи навигационной информации с подвижного объекта 1 на платформу 2 по рентгеновскому каналу связи, в устройстве предусмотрен информационный выход 15 блока обработки информации 11 подвижного объекта 1, соединенный с входом блока управления 3 источника рентгеновского излучения 4 подвижного объекта 1. Кроме того, выход навигационной информации блока обработки информации 6 платформы 2 соединен с входом устройства отображения 16 платформы 2 для отображения навигационной информации персоналу платформы 2, а также с информационным выходом 17 для соединения со входом системы управления платформы 2 для использования навигационной информации устройства при управлении движением платформы 2 относительно подвижного объекта 1.
С целью поиска, обнаружения и сопровождения подвижного объекта источник рентгеновского излучения 9 и блоки детектирования 5 платформы 2 устанавливаются на опорно-поворотное устройство 18, управляющий вход которого 19 связан с выходом наведения опорно-поворотного устройства системы управления платформой.
С целью сохранения возможности измерения высоты и углов ориентации подвижного объекта по обратно рассеянному сигналу от подстилающей поверхности (местности) в блоке обработки информации 11 подвижного объекта 1 реализуют режим комплексной обработки информации об интенсивности и времени распространения прямого и обратно рассеянного рентгеновского излучения по известным алгоритмам, например, приведенным в патенте РФ RU 2236024.
Аппаратура размещается на подвижном объекте 1 в подвесных контейнерах для использования в сложных условиях применения и в учебно-тренировочных целях, а также размещается на платформе 2 в мобильных (переносных) контейнерах, в случае возникновения сложных условий применения.
С целью адаптации уровня рентгеновского излучения источника рентгеновского излучения 4 подвижного объекта 1 в зависимости от дальности выход управления 20 блока обработки информации 11 подвижного объекта 1 соединен с входом управления уровнем рентгеновского излучения (величины тока рентгеновской трубки) блока управления 3 источника рентгеновского излучения 4 подвижного объекта 1.
С целью адаптации уровня рентгеновского излучения источника рентгеновского излучения 9 платформы 2 в зависимости от дальности выход управления 21 с выхода блока обработки информации 6 платформы 2 соединен с входом управления уровнем рентгеновского излучения (величины тока рентгеновской трубки) блока управления 8 источника рентгеновского излучения 9 платформы 2.
С целью обеспечения возможности обмена информацией между подвижным объектом 1 и платформой 2 с использованием помехоустойчивого рентгеновского канала связи, дополнительный вход блока управления 8 источника рентгеновского излучения 9 платформы 2 соединен с выходом информационного устройства 22 платформы и дополнительный вход блока управления 3 источника рентгеновского излучения 4 подвижного объекта 1 соединен с выходом информационного устройства 23 подвижного объекта 1.
Для повышения надежности взаимной навигации предусмотрено измерение высоты (наклонной дальности) подвижного объекта в блоке обработки информации 6 платформы 2. Для этого вход синхронизации блока обработки информации 6 соединен с выходом сигнала синхронизации 24 блока управления 8 источника рентгеновского излучения 9 платформы 2.
Многофункциональность рентгеновской навигационной системы обусловлена следующим:
- реализацией одновременно функций навигации и дуплексной связи;
- использованием для навигации прямого рентгеновского излучения, при сохранении возможности использования обратно рассеянного излучения;
- применение многофункциональной рентгеновской навигационной системы возможно для взаимной навигации и связи подвижных объектов и платформ наземного, воздушного, морского и космического базирования.
Изобретение поясняется чертежами.
На фиг. 1 изображена многофункциональная рентгеновская навигационная система;
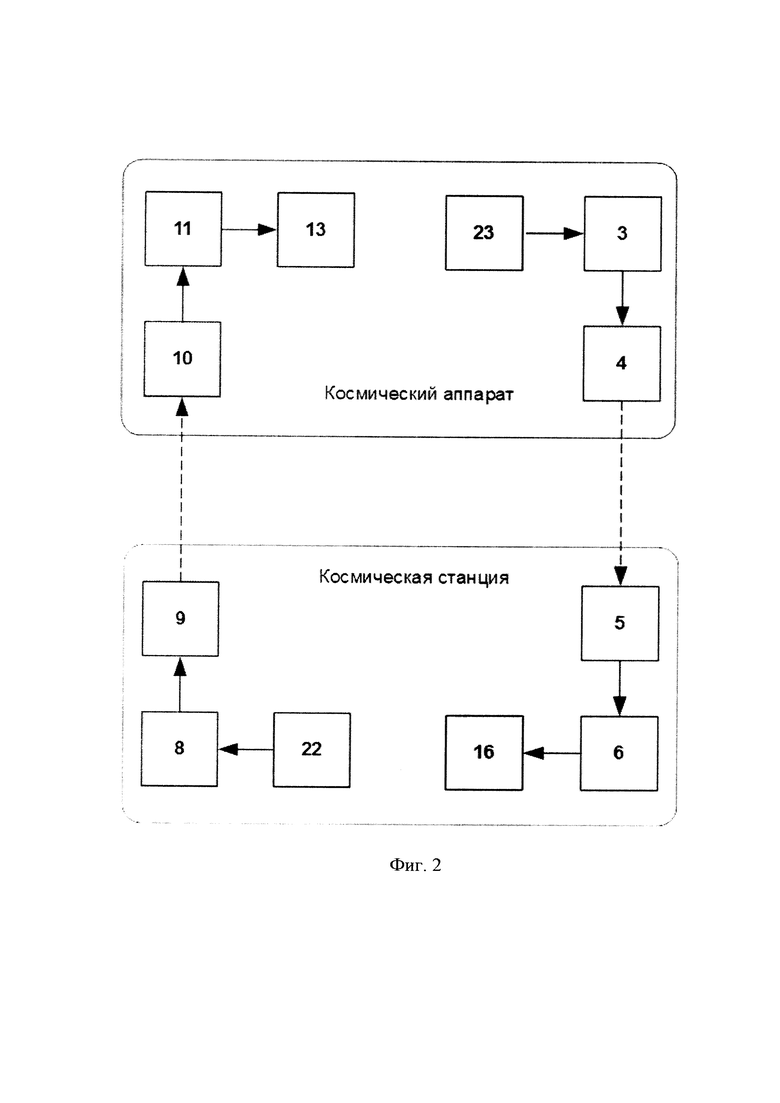
- на фиг. 2 - обобщенная схема комбинированного устройства обработки импульсных сигналов.
Многофункциональная рентгеновская навигационная система, реализующая способ навигации и посадки летательных аппаратов, работает следующим образом.
С выхода блока управления 3 подается сигнал управления на вход источника рентгеновского излучения 4 подвижного объекта 1, в результате формируется рентгеновское излучение, направленное в сторону платформы 2.
Рентгеновское излучение источника рентгеновского излучения 4 подвижного объекта 1 регистрируется одним или несколькими блоками детектирования 5 (5-1…5-4), размещенными на платформе 2, выходные сигналы блоков детектирования 5 платформы 2 поступают на соответствующие входы блока обработки информации 6 платформы 2.
После обработки сигналов блоков детектирования 5 на выходе блока обработки информации 6 платформы 2 формируется кодированный сигнал для передачи по рентгеновскому каналу связи на борт подвижного объекта 1.
Кодированный сигнал с выхода 7 блока обработки информации 6 платформы 2 поступает на вход блока управления 8 платформы и с его выхода передается на вход источника рентгеновского излучения 9 платформы 2, в результате формируется кодированное рентгеновское излучение, направленное в сторону подвижного объекта 1.
Кодированное рентгеновское излучение источника рентгеновского излучения 9 платформы 2 регистрируется одним или несколькими блоками детектирования 10 (10-1…10-4), размещенными на подвижном объекте 1, выходные сигналы блоков детектирования 10 подвижного объекта поступают на входы блока обработки информации 11 подвижного объекта 1.
Для определения высоты (наклонной дальности) подвижного объекта 1 относительно платформы 2 и углов ориентации подвижного объекта 1 относительно платформы 2 по времени распространения рентгеновского излучения в блоке обработки информации 11 подвижного объекта 1 используется в качестве опорного сигнал синхронизации 12 с выхода блока управления 3 источника рентгеновского излучения 4 подвижного объекта 1.
После обработки кодированных рентгеновских сигналов от всех блоков детектирования 10 (10-1…10-4) подвижного объекта 1, с учетом их задержки относительно опорного сигнала синхронизации 12 блока управления 3 подвижного объекта 1, на выходе блока обработки информации И подвижного объекта 1 формируется выходная навигационная информация.
Выходная навигационная информация передается с выхода блока обработки информации 11 подвижного объекта 1 на вход устройства отображения 13 подвижного объекта 1, на котором происходит отображение навигационной информации персоналу подвижного объекта 1.
Выходная навигационная информация блока обработки информации 11 подвижного объекта 1 передается также на информационный выход 14 для передачи на вход системы управления подвижного объекта 1 для использования при управлении движением подвижного объекта 1 относительно платформы 2 (посадкой, стыковкой и др.).
С целью повышения надежности взаимной навигации выходная навигационная информация блока обработки информации 11 подвижного объекта 1 передается на платформу 2 по рентгеновскому каналу связи, реализованному следующим образом.
С информационного выхода 15 блока обработки информации 11 подвижного объекта 1 навигационная информация в закодированном виде поступает на вход блока управления 3 источника рентгеновского излучения 4 подвижного объекта 1.
С выхода блока управления 3 управляющий сигнал поступает на вход управления источника рентгеновского излучения 4 подвижного объекта 1, в результате в источнике рентгеновского излучения 4 подвижного объекта 1 формируется рентгеновское излучение, направленное в сторону платформы 2, содержащее навигационную информацию в закодированном виде.
Рентгеновское излучение источника рентгеновского излучения 4 подвижного объекта 1 регистрируется одним или несколькими блоками детектирования 5 (5-1…5-4), размещенными на платформе 2, принятая блоками детектирования 5 навигационная информация в закодированном виде поступает на вход блока обработки информации 6 платформы 2.
После декодирования принятой от подвижного объекта 1 навигационной информации, на выходе блока обработки информации 6 платформы 2 формируется информационный сигнал о высоте (наклонной дальности) подвижного объекта 1 относительно платформы 2 и углах ориентации подвижного объекта 1 относительно платформы 2.
Выходная навигационная информация с выхода блока обработки информации 6 платформы 2 передается на вход устройства отображения 16 платформы 2, на котором происходит отображение навигационной информации подвижного объекта 1 персоналу платформы 2.
Выходная навигационная информация блока обработки информации 6 платформы 2 также передается на информационный выход 17 для передачи на вход системы управления платформы 2 для контроля и управления движением платформы 2 при выполнении сближения посадки, стыковки или других маневров подвижного объекта 1 относительно платформы 2.
В качестве дублирующего режима предусмотрена возможность формирования первичного рентгеновского излучения поочередно источником рентгеновского излучения 4 подвижного объекта 1 и источником рентгеновского излучения 9 платформы 2 с последующей обработкой информации блоком обработки информации 6 платформы 2 и блоком обработки информации 11 подвижного объекта 1.
В дублирующем режиме высота (наклонная дальность) подвижного объекта 1 относительно платформы 2 вычисляется в блоке обработки информации 6 платформы 2. При этом в качестве опорного сигнала на вход блока обработки информации 6 платформы 2 подается сигнал синхронизации 24 с выхода блока управления 8 источника рентгеновского излучения 9 платформы 2.
С целью снижения уровня рентгеновского излучения источником рентгеновского излучения 4 подвижного объекта 1 и источником рентгеновского излучения 9 платформы 2 в зависимости от высоты (наклонной дальности) подвижного объекта 1 относительно платформы 2 предусмотрена работа устройства в режиме адаптации уровня излучения следующим образом.
Используются сигналы управления 21 и 20 с выходов блоков обработки информации 6 и 11 (платформы 2 и подвижного объекта 1), которые поступают на входы управления уровнем рентгеновского излучения соответствующих блоков управления 8 и 3 источников рентгеновского излучения 9 и 4 (платформы 2 и подвижного объекта 1).
При этом сигналы управления 21 и 20 на входе блоков управления 8 и 3 (платформы 2 и подвижного объекта 1) позволяют, например, путем регулировки тока рентгеновской трубки в источниках рентгеновского излучения 9 и 4 (платформы 2 и подвижного объекта 1) снижать уровень рентгеновского излучения при уменьшении высоты (наклонной дальности) подвижного объекта 1 относительно платформы 2.
Для обеспечения поиска, обнаружения и сопровождения подвижного объекта 1 предлагается на платформе 2 реализовать режим сканирования окружающего пространства следующим образом:
- источник рентгеновского излучения 9 и блоки детектирования 5 (5-1…5-4) платформы 2 устанавливаются на опорно-поворотное устройство 18;
управление углами поворота опорно-поворотного устройства 18 выполняется по сигналу 19 от системы управления платформы 2 автоматически или вручную по командам оператора платформы 2.
С целью сохранения возможности измерения высоты и углов ориентации подвижного объекта 1 (вне зоны действия рентгеновских систем платформы 2) только по обратно рассеянному рентгеновскому излучению от подстилающей поверхности (местности) в блоке обработки информации 11 подвижного объекта 1 реализуют режим комплексной обработки информации об интенсивности и времени распространения прямого и обратно рассеянного рентгеновского излучения по известным алгоритмам (например, приведенном в патенте РФ RU 2236024).
Для обеспечения возможности использования предложенного устройства на подвижном объекте 1 только в сложных условиях применения, в том числе в сложных метеоусловиях, и в учебно-тренировочных целях, устройство на подвижном объекте 1 размещают в подвесных контейнерах.
Для обеспечения возможности использования устройства на платформе 2 только в сложных условиях применения, в том числе в сложных метеоусловиях, и в учебно-тренировочных целях, устройство размещают на платформе 2 в мобильных (переносных) контейнерах.
Для обеспечения возможности обмена информацией между подвижным объектом 1 и платформой 2 с использованием помехоустойчивого рентгеновского канала связи, навигационная и другая служебная информация платформы 2 для подвижного объекта 1 передается на дополнительный вход блока управления 8 источника рентгеновского излучения 9 платформы, соединенный с выходом информационного устройства 22 платформы 2.
Аналогично навигационная и другая служебная информация подвижного объекта 1 для платформы 2 передается на дополнительный вход блока управления 3 источника рентгеновского излучения 4 подвижного объекта 1, соединенный с выходом информационного устройства 23 подвижного объекта 1.
Для обеспечения работы предлагаемого способа навигации и реализации многофункциональной рентгеновской навигационной системы (МРНС), реализующей способ навигации подвижных объектов, использованы известные алгоритмы расчета.
1. Измерение расстояния (высоты или наклонной дальности) между подвижным объектом и платформой выполняется по известной формуле:
где: Н - измеряемое расстояние, м;
с - скорость света, м/сек;
tн - время прохождения рентгеновского сигнала от подвижного объекта до платформы, сек;
tв - время прохождения рентгеновского сигнала от платформы до подвижного объекта, сек.
2. Интенсивность обратно рассеянного излучения в условиях падения узкого пучка рентгеновского излучения интенсивностью I0 на поверхность отражателя [1]:

где: Iс - интенсивность обратно рассеянного излучения, Дж/м2с;
Н - расстояние до отражающей поверхности, м;
Ω - телесный угол, рад;
 - функция ослабления прямого и обратно рассеянного рентгеновского излучения, отн. ед.;
- функция ослабления прямого и обратно рассеянного рентгеновского излучения, отн. ед.;
АЭ - интегральное энергетическое альбедо (отношение интенсивности обратно рассеянного излучения к интенсивности прямого излучения, падающего на поверхность), %;
SД - площадь детектора, м2.
3. Интегральное энергетическое альбедо АЭ для 6<Z<50 равно:

где: Еγ - максимальная энергия фотонов, Эв;
θ0 - угол отклонения от оси пучка, рад;
ρ - плотность отражателя, кг/м3;
Z - атомный номер материала отражателя.
4. При сравнении максимальной высоты (наклонной дальности для предложенного технического решения с регистрацией прямого рентгеновского излучения (Н'прям) и первого прототипа (патент РФ RU 2236024) для случаев использования обратно рассеянного излучения (Н'обр), получим на основе формулы п.п. 2 следующее соотношение:
Теоретическая оценка приведенного отношения максимальной высоты (наклонной дальности между подвижным объектом и платформой) для предложенного технического решения и прототипов с использованием обратно рассеянного излучения составит по формуле п.п. 3 (для значений Еγ=60*103 Эв, θ0=30 град, ρ=2*103 кг/м3, Z=14. кремний) примерно 10,7±20%, или порядка 10 раз.
Результаты теоретических расчетов увеличения высоты (наклонной дальности) для предложенного технического решения были проверены экспериментально в условиях специализированного стенда.
5. При известных интенсивности (плотности) осадков, мм/час (грамм/см3, мм) и эквиваленте фантома обшивки корпуса подвижного объекта (толщина мм) можно рассчитать, а также экспериментально получить оценку измеряемой высоты (наклонной дальности) подвижного объекта относительно платформы с учетом поглощения излучения:
- воздушной средой,
- осадками (дождем или снегом с интенсивностью мм/час),
- песчаной пылью плотностью (грамм/см3),
- плазмой, например, при посадке космического аппарата, интенсивностью (ионы/см3),
- металлической обшивкой корпуса подвижного объекта, алюминий (титан) толщиной (мм) [6].
Представлены предварительные результаты теоретической и экспериментальной оценки максимальной высоты (наклонной дальности) между подвижным объектом и платформой, измеряемой МРНС в условиях осадков и других условий распространения (табл. 1).
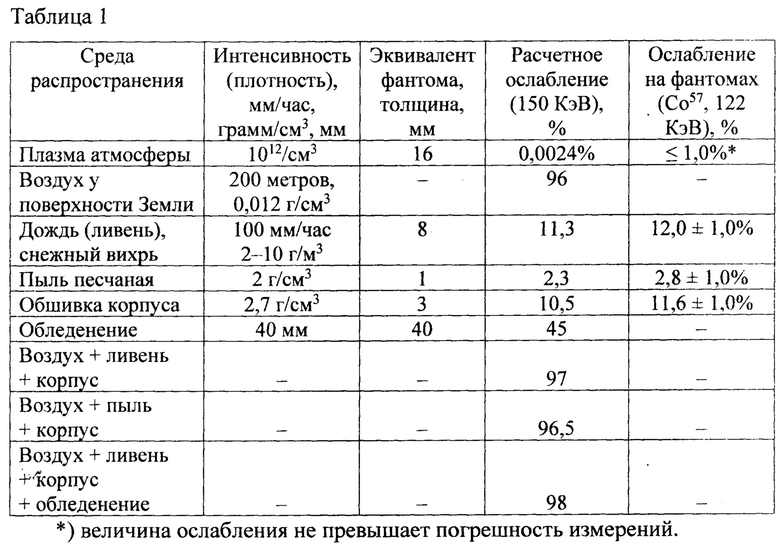
Наиболее сложными условиями является суммарное поглощение (до 98%) воздушной средой, ливнем (пыльным или снежным вихрем) и обшивкой корпуса летательного аппарата в условиях обледенения.
На основе анализа доступной информации о параметрах осадков и других условий распространения, были определены параметры и изготовлены несколько вариантов конструкции фантомов.
Результаты экспериментальных исследований, выполненных на фантомах в условиях специализированного стенда, подтверждают расчетные оценки поглощения рентгеновского излучения в различных средах.
Полученные результаты экспериментов можно использовать для подготовки и проведения полу натурных исследований МРНС.
6. Расчет максимальной высоты (наклонной дальности) для предложенного технического решения на основе экспериментальных данных.
Используем для расчета данные экспериментов с макетом рентгеновского канала связи [2].
Параметры рентгеновского передатчика (РП) были следующие:
- анодное напряжение рентгеновской трубки Ua=30 кВ,
- импульсный ток рентгеновской трубки i=30 мА.
Параметры блока детектирования (БД) были следующие:
- пластмассовый сцинтиллятор диаметром 33 мм и толщиной 10 мм,
- устройство детектирования типа ETL 9141 В,
- предварительный усилитель с коэффициентом усиления 10.
В результате экспериментов максимальная дальность Н составила 1,7 м.
Для расчета максимальной дальности при других параметрах РП и БД выразим минимальную интенсивность рентгеновского излучения (РИ), регистрируемую детектором [1]:
где; Imin - минимальная интенсивность РИ, регистрируемая детектором, Дж/м2с;
I0 - интенсивность падающего тонкого луча РИ, Дж/м2с;
Н - расстояние до отражающей поверхности, м;
Ω - телесный угол, рад;
SД - площадь детектора, м2;
μ - линейный коэффициент ослабления РИ веществом (воздухом).
7. Функция f(μ1H) может быть представлена следующим образом:
8. Интенсивность излучения рентгеновской трубки может быть определена следующим образом [1]:

где: K - коэффициент пропорциональности (0,8±0,2)10-9, В-1;
Za - атомный номер материала анода;
i - ток рентгеновской трубки, А;
Ua - напряжение на аноде рентгеновской трубки.
9. Введем обобщенный постоянный параметр Kp и по формулам п.п. 7. и 8. определим зависимость Н от параметров рентгеновского передатчика:

10. Увеличим расчетные значения параметров рентгеновского передатчика (РП) до реально достижимых в современных портативных рентгеновских аппаратах [3]:

где: Ua' - расчетное напряжение на аноде рентгеновской трубки, В;
Ua - напряжение на аноде рентгеновской трубки из эксперимента, В;
i' - расчетный ток рентгеновской трубки, А;
i - ток рентгеновской трубки из эксперимента, А.
11. Увеличим на порядок расчетную чувствительность БД до реально достижимых значений [4]:

12. С учетом выбранных расчетных данных получим расчетное значение Н'=kН:

Возьмем натуральный логарифм:

Подставим в эту формулу значения: Н=1,7 м, μ30=2,6⋅10-2 м-1, μ200=1,59⋅10-2 м-1 и получим расчетное значение Кр=45,4.
13. Таким образом, при расчетных параметрах РП (Ua'=200 кВ, i'=1А) и чувствительности БД в 10 раз выше экспериментального БД, расчетное значение максимальной высоты (наклонной дальности) между подвижным объектом и платформой для предложенного технического решения на основе экспериментальных данных, составит:

Полученные данные на основе стендовых экспериментов показывают, что для заявляемого технического решения максимальная расчетная высота (наклонная дальность между подвижным объектом и платформой) составляет, не менее 77 метров.
Определение уровня поглощенной дозы рентгеновского излучения для персонала при использовании режима адаптации.
1. Мощность поглощенной дозы (МПД) без защитных экранов определяется соотношением [5]:

где: 103 - коэффициент перевода мГр в мкГр;
KR - радиационный выход - отношение мощности воздушной кермы в первичном пучке излучения на расстоянии 1 м от фокуса трубки, умноженной на квадрат этого расстояния, к силе тока, (мГр⋅м2)/(мА⋅мин);
W - рабочая нагрузка рентгеновского аппарата, (мА⋅мин)/нед;
N - коэффициент направленности излучения, отн. ед.;
30 - значение нормированного времени работы РП в неделю при односменной работе персонала группы А (30-часовая рабочая неделя), ч/нед;
R - расстояние от фокуса рентгеновской трубки до точки расчета, м.
2. Для существенного снижения мощности дозы рентгеновского излучения для персонала в предложенном техническом решении вводится режим адаптации (снижения) величины тока рентгеновской трубки пропорционально квадрату наклонной дальности (высоты) между подвижным объектом и платформой.
При этом сохраняется мощность рентгеновского излучения в месте нахождения БД, необходимая для надежных измерений навигационных параметров подвижного объекта относительно платформы.
Данный режим адаптации вводится как для РП, расположенного на подвижном объекте, так и для РП, находящегося на платформе.
3. Для адаптации мощности рентгеновского излучателя к высоте путем снижения анодного тока рентгеновской трубки можно использовать известное соотношение:
где: K(Ua, Iа) - мощность рентгеновского излучения (кермы), мГр/мин;
KR - радиационный выход рентгеновской трубки, (мГр⋅м2)/(мА⋅мин);
Iа - анодный ток рентгеновской трубки, А;
R - расстояние между анодом рентгеновской трубки и местом измерения K (Ua, Ia).
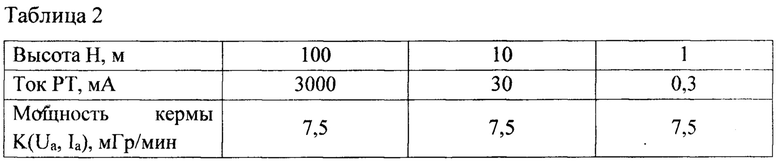
4. Для случая постоянного анодного напряжения Ua=200 кВ, KR=25 мГр⋅м2/(мА⋅мин), N=1, расчетные значения допустимого снижения анодного тока рентгеновской трубки (РТ) приведены в таблице 2.
5. Мощность поглощенной дозы (нагрузка на персонал) рассчитывается для человека, находящегося в 1 метре от источника рентгеновского излучения, так и для людей, находящихся рядом с БД (см. таблицу 3).
Ниже в таблице 3 приведены результаты расчетов по формуле (п.п.1)

для следующих условий при адаптации (снижении) уровня тока РТ обратно пропорционально квадрату высоты (наклонной дальности):
- 103 - коэффициент перевода мГр в мкГр;
- радиационный выход KR=25 мГр⋅м2/мА мин на расстоянии 1 м от анода рентгеновской трубки при анодном токе 1 мА, фильтре 2 мм A1, Ua=200 кВ;
- средняя длительность одного рабочего включения РП составляет 5 мин;
- количество включений РП в неделю - 100.
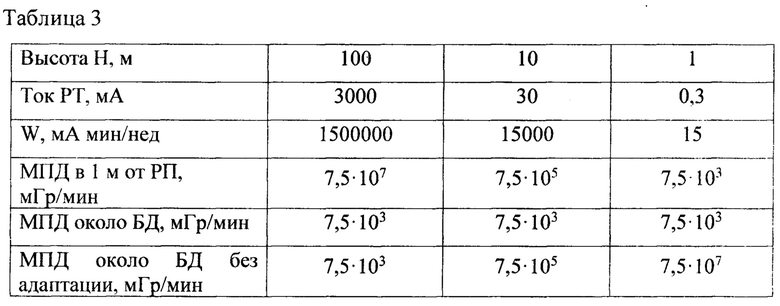
Из таблицы 3 следует, что МПД для персонала, находящегося около РП и в районе БД при наличии режима адаптации тока РТ от высоты, снижается примерно пропорционально квадрату высоты.
Например, для персонала, находящегося в 1 м от РП, предложенное техническое решение адаптации тока РТ при изменении высоты подвижного объекта от 100 м до 10 м, обеспечивает уменьшение МПД в 100 раз.
Аналогично, для персонала, находящегося в районе размещения БД, адаптация тока РТ с уменьшением высоты подвижного объекта от 100 м до 10 м, обеспечивает уменьшение МПД также в 100 раз.
Таким образом, заявленное изобретение обеспечивает увеличение максимально измеряемого расстояния (наклонная дальность) между подвижным объектом и платформой по крайней мере в 10 раз, при этом мощность поглощенной дозы рентгеновского излучения для персонала при уменьшении дальности (высоты) в 10 раз снижается не менее чем в 100 раз.
Источники информации
1. Герчиков Ф.Л. Управляемое импульсное рентгеновское излучение в приборостроении, М, Энергоатомиздат, 1987, с. 86.
2. Тимофеев Г.А., Потрахов Н.Н., Нечаев А.И., Экспериментальные исследования рентгеновского канала связи // V Всероссийская научно-практическая конференция производителей рентгеновской техники. Сборник материалов конференции. СПб.: Изд. СПбГЭТУ «ЛЭТИ», 2019, с. 97.
3. Артемьев Б.В., Буклей А.А. Радиационный контроль: учебное пособие / под. общ. ред. В.В. Клюева 2-е изд. М.: Изд. «Спектр», 2013, с. 192.
4. Гребенщиков В.В., Грудский А.Я., Дамаскинский Е.А. Сцинтилляционный счетчик на высокую скорость счета для энергетического диапазона от 5 до 30 кэВ// Материалы Первой Европейской конференции по синхротронному излучению// Великобритания, Дарсбери, 1994, с. 85.
5. Гигиенические требования к устройству и эксплуатации рентгеновских кабинетов, аппаратов и проведению рентгенологических исследований. СанПиН 2.6.1.1192-03.
6. Гребенщиков В.В., Лобанов М.В., Егоров А.Г., Назарук В.П., Нечаев А.И., Потрахов Н.Н., Тимофеев Г.А. «Экспериментальная оценка прохождения рентгеновского сигнала в условиях осадков и других условий распространения». //VI Всероссийская научно-практическая конференция производителей рентгеновской техники. Программа и материалы конференции, 28-29 ноября 2019 г., СПб: ГЭТУ «ЛЭТИ», стр. 65-69.
7. Shibin Song, Luping Xu, Hua Zhang, Yuanjie Bai, Liyan Luo, Simultaneous Ranging and Communication Based on X-Ray Communications, Xi'an Microelectronics Technology Institute Xi'an China Conference paper, Part of the Lecture Notes in Electrical Engineering book series (LNEE, volume 342), 2015.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СПОСОБ КОСМИЧЕСКОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378617C1 |
| Гидроакустическая навигационная система дальнего радиуса действия | 2022 |
|
RU2790937C1 |
| СПОСОБ И СИСТЕМА КОСМИЧЕСКОЙ НАВИГАЦИИ | 2014 |
|
RU2568937C2 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
Группа изобретений относится к способу навигации подвижных объектов (ПО) и многофункциональной рентгеновской навигационной системе. Для навигации подвижных объектов формируют на борту ПО импульсное рентгеновское излучение в сторону платформы (ПЛ), на которой производят его прием и обработку, формируют выходной сигнал с помощью рентгеновского канала связи, который принимают на борту ПО, где формируют навигационную информацию о дальности и углах взаимной ориентации ПО относительно ПЛ. Система содержит оборудование на борту ПО, включающее блок управления, источник рентгеновского излучения, блоки детектирования, блок обработки информации, устройство отображения навигационной информации и оборудование на ПЛ, включающее блоки детектирования, блок обработки информации, блок управления, источник рентгеновского излучения, устройство отображения навигационной информации, опорно-поворотное устройство, информационное устройство, соединенные определенным образом. Обеспечивается повышение дальности, снижение уровня рентгеновского излучения для защиты персонала, возможность информационного обмена при обеспечении взаимной навигации ПО и ПЛ. 2 н. и 7 з.п. ф-лы, 2 ил.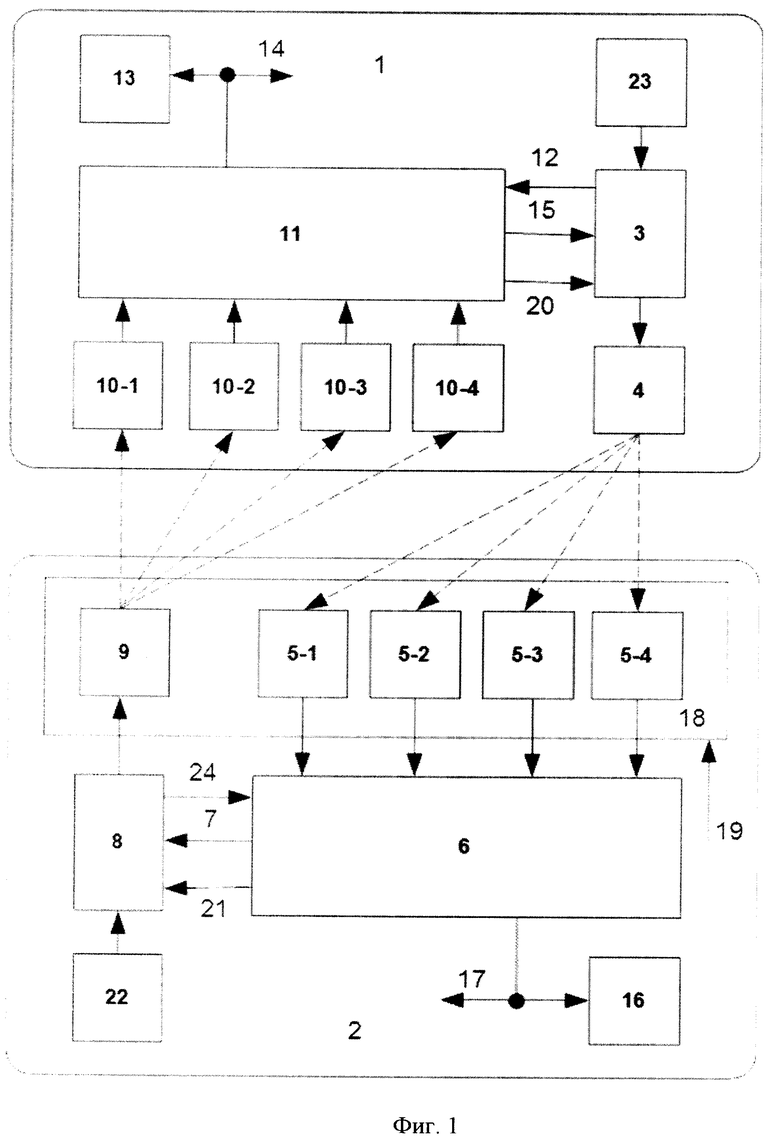
1. Способ навигации подвижных объектов, заключающийся в формировании на борту подвижного объекта (ПО) импульсного рентгеновского излучения, направленного в сторону платформы (ПЛ), регистрации рентгеновского излучения одним или несколькими блоками детектирования (БД), расположенными на ПЛ, и последующей обработке сигналов БД в блоке обработки информации (БОИ) ПЛ, отличающийся тем, что выходной сигнал БОИ ПЛ передается на ПО с помощью рентгеновского канала связи (РКС), реализуемого путем формирования рентгеновского излучения источником рентгеновского излучения (ИРИ) ПЛ, направленного в сторону ПО, приема рентгеновского излучения одним или несколькими БД на борту ПО, последующей обработки сигналов в БОИ ПО, причем в качестве опорного сигнала для измерений дальности и углов ориентации используется сигнал блока управления (БУ) ИРИ ПО, в результате на выходе БОИ ПО формируется навигационная информация о дальности и углах взаимной ориентации ПО относительно ПЛ, отображаемая на устройстве отображения (УО) и передаваемая в систему управления ПО.
2. Многофункциональная рентгеновская навигационная система, содержащая на борту подвижного объекта (ПО) блок управления (БУ), выход которого подключен к входу управления источника рентгеновского излучения (ИРИ), рентгеновское излучение которого направлено в сторону платформы (ПЛ) и регистрируется одним или несколькими блоками детектирования (БД), размещенными на ПЛ, выходы БД ПЛ соединены со входами блока обработки информации (БОИ) ПЛ, отличающаяся тем, что выход БОИ ПЛ соединен со входом БУ ИРИ ПЛ, рентгеновское излучение которого направлено в сторону ПО и регистрируется одним или несколькими БД ПО, выходы которых соединены со входами БОИ ПО, причем вход синхронизации БОИ соединен с выходом опорного сигнала синхронизации БУ ИРИ ПО, а выход навигационной информации БОИ ПО соединен со входом устройства отображения (УО) ПО, а также с информационным входом системы управления ПО.
3. Система по п. 2, отличающаяся тем, что в устройстве предусмотрен информационный выход БОИ ПО, соединенный с информационным входом УО ПО, а также с информационным входом системы управления ПО для использования навигационной информации устройства при управлении движением ПО относительно ПЛ, аналогично выход навигационной информации БОИ ПЛ соединен со входом УО ПЛ, а также с информационным входом системы управления ПЛ для использования навигационной информации устройства при управлении движением ПЛ относительно ПО.
4. Система по п. 2, отличающаяся тем, что ИРИ и БД ПЛ устанавливаются на опорно-поворотные устройства (ОПУ), управляющие входы которых связаны с выходами наведения ОПУ системы управления ПЛ.
5. Система по п. 2, отличающаяся тем, что в БОИ ПО дополнительно реализуют режим комплексной обработки информации об интенсивности и времени распространения прямого и обратного рассеянного рентгеновского излучения для определения высоты (наклонной дальности) от подстилающей поверхности по известным алгоритмам.
6. Система по п. 2, отличающаяся тем, что аппаратура размещается на ПО в подвесных контейнерах для использования в сложных условиях применения и в учебно-тренировочных целях, а также размещается на ПЛ в мобильных (переносных) контейнерах, в случае возникновения сложных условий применения.
7. Система по п. 3, отличающаяся тем, что дополнительный выход БОИ ПО соединен с входом управления уровнем рентгеновского излучения (величины тока рентгеновской трубки) БУ ИРИ ПО.
8. Система по п. 3, отличающаяся тем, что дополнительный выход БОИ ПЛ соединен со входом управления уровнем рентгеновского излучения (величины тока рентгеновской трубки) БУ ИРИ ПЛ.
9. Система по п. 3, отличающаяся тем, что дополнительный вход БУ ИРИ ПЛ соединен с выходом информационного устройства (УИ) ПЛ и дополнительный вход БУ ИРИ ПО соединен с выходом УИ ПО для организации обмена информацией по рентгеновскому каналу связи между ПО и ПЛ.
| СПОСОБ ОПРЕДЕЛЕНИЯ МАЛЫХ ВЫСОТ И РЕНТГЕНОВСКИЙ ВЫСОТОМЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2236024C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032919C1 |
| CN 105571597 B, 15.02.2019 | |||
| CN 105571597 A, 11.05.2016 | |||
| CN 104579503 B, 22.02.2017. | |||

