Изобретение относится к управлению движением, преимущественно, наземных транспортных средств.
Во многих случаях целью управления движением наземного транспортного средства на значительных участках пути является сохранение постоянным, в том числе и равным нулю, расстояния до некоторой физически заданной на поверхности движения линии, т.е. обеспечение эквидистантности движения. В качестве примера можно привести движение сельскохозяйственого агрегата относительно границы обработанного участка поля, автомобиля относительно полосы дорожной разметки или обочины, транспортного робота относительно задающей линии, самолета при взлете и посадке относительно боковой границы взлетной полосы, плавсредства относительно кромки берега и т.п.
1. Транспортным средством (ТС) будем называть объект управления, снабженный движителем и системой управления движением, и будем подразделять их на самодвижущиеся и буксируемые; к первым будем относить одиночные машины (например, трактор) и жестко связанные (с исключением возможности их взаимного углового и(или) линейного смещения, например, навесные) с машиной агрегаты (плуг, сеялка и т.п.), а к буксируемым не жестко связанные (с возможностью их относительно углового и(или) линейного смещения) с машиной-буксировщиком агрегаты (например, широкозахватные посевные сцепки сеялок).
2. Систему управления (СУ) движением будем считать состоящей их трех частей: датчики (Д), управляющее устройство (УУ), исполнительный орган (ИО); она может быть ручной (оператор полностью выполняет функции Д и УУ), автоматизированной (оператор частично выполняет функции Д и УУ) и автоматической (оператор в управлении движением не участвует или выполняет только контроль за работой СУ). У самодвижущегося ТС исполнительный орган СУ его управляющие колеса, у буксируемого управляющие колеса машины-буксировщика; в ручной и автоматизированной СУ оператор выполняет также функции привода исполнительного органа.
3. Физически заданную на поверхности движения и используемую для управления движением ТС линию будем называть опорной траекторией ОТ; она может быть прямолинейной и криволинейной. Опорные траектории можно разделить на независимые объективно существующие в природе (например, кромка берега) или искусственно созаднные заранее (например, полоса дорожной разметки) и зависимые создаваеые при каждом предыдущем проходе при "челночном" движении для каждого последующего (например, при движении сельхозагрегатов при пахоте, севе и т.п.).
4. Аналогично, как это принято в навигации, будем рассматривать поступательное движение центра масс (ц.м.) одиночного ТС, считая что именно его эквидистантное движение и должно быть обеспечено, что ТС движется по плоской поверхности и что вектор его скорости всегда лежит в плоскости, параллельной этой поверхности.
Особенности управления эквидистантным движением других точек машины или прицепа также будут отмечены.
5. Точку поверхности (1, фиг.1), над которой в данный момент находится ц. м. ТС, будем называть текущим местом ТС (при отсутствии движения местом ТС).
6. Эквидистантную ОТ линию на поверхности движения, по котрой должно перемещаться место ТС, будем называть заданной траекторией ЗТ).
7. Реально получаемую в процессе движения траекторию места ТС будем называть линией пути (ЛП).
8. Нормальную проекцию места ТС на линии пути (1, фиг.1) на заданную и опорную траектории будем называть местом ТС на ЗТ и ОТ соответственно (1'и 1", фиг.1).
9. Расстояние l между местом ТС на ЗТ и местом ТС на ОТ заданная дистанция (ЗД); расстояние Δl между местом ТС на ЛП и местом ТС на ЗТ линейно-боковое отклонение (ЛБО); сумма l +Δl l L текущая дистанция (ТД).
В частном случае l и Δl могут равняться нулю как вместе, так и порознь.
10. Угол β (/ β / ≥ 0) с вершиной в месте ТС на ЛП между линией, параллельной касательной к ОТ в месте ТС на ОТ и вектором скорости поступательного движения  относительный курс (ОК). Если
относительный курс (ОК). Если  совпадает с продольной осью ТС или параллелен ей, то β- также и угловое отклонение (ОУ ТС) от ОТ.
совпадает с продольной осью ТС или параллелен ей, то β- также и угловое отклонение (ОУ ТС) от ОТ.
11. Точку (математически), например 2 (фиг.1), или прилежащий к ней отрезок (физически) ОТ, используемую(ый) в данный момент движения для определения Δl и β и лежащую(ий) на фиксированном расстоянии r от места ТС, будем называть текущей навигационной точкой (ТНТ).
12. Угол ϕзад между касательной к ЗТ с вершиной в месте ТС на 3Т (1) и направлением на соответствующую ей ТНТ (3, фиг.1) заданный курсовой угол ТНТ. Каждой ЗТ соответствует свой (при неизменном r); угол ϕт с вершиной в месте ТС на ЛП между направлением на соответствующую (при неизменном r) ТНТ и линией, параллельной касательной к ОТ в месте ТС на ОТ текущий курсовой угол ТНТ; если ЗТ и ЛП совпадают, то ϕзад=ϕт угол ϕc ϕт + β суммарный курсовой угол ТНТ.
13. Рыскание ТС периодические колебания ТС в процессе движения относительно ЗТ, вызванные как внешними, так и управляющими воздействиями.
14. Введем понятие непрерывного и дискретного навигационного поля.
Непрерывным будем считать такое поле, в котором невозможно с помощью технических устройств выделить отдельную "силовую линию" (электромагнитное поле всенаправленных радиотехнических устройств, магнитное, световое, температур и давлений и т.п.). Такое поле характеризуется градиентами, относительно которых возможно определение только собственных угловых координат объектов, т.е. углового положения осей связанной с объектом системы координат. Линейная координата объекта в таком поле может быть определена лишь относительно его некоторой эквипотенциальной поверхности (например, высота относительно поверхности с фиксированным давлением).
Дискретным будем считать навигационное поле, состоящее из "силовых линий", каждая из которых может быть выделена тем или иным устройством (лучи лазеров, борозды, рядки растений и т.п.), и относительно которых возможно определение как собственной угловой, так и линейной координаты (дальности до этой "силовой линии").
Очевидно, что управление ТС, движущимися по поверхности, может осуществляться с использованием дискретных навигационных полей, положение "силовых линий" которых имеет детерминированную связь с поверхностью движения. Каждая опорная траектория и является такой "силовой линией" дискретного навигационного поля на поверхности движения.
Очевидно, что ТС будет двигаться по эквидистантной относительно опорной заданной траектории, если его центр масс в начале пути находился на ЗТ и вектор скорости  в каждый момент движения остается параллельным касательной к ОТ в текущем месте ТС на ОТ.
в каждый момент движения остается параллельным касательной к ОТ в текущем месте ТС на ОТ.
Такое движение, при котором ЛП совпадает с ЗТ и повторяет ОТ, названо в [1, c.25] следящим.
Очевидно также, что возникновение УО β (фиг.1) при наличии поступательного движния ТС приводит к изменению заданной дистанции l, иначе к появлению ЛБО Δl, которое (для малых β ) может быть определено по выражению
Δl C1∫V(t)β(t)dt (1)
и его изменению со скоростью
Δl C2V(t)β(t), (2)
и что последующее уменьшение β до нуля (например, за счет управляющего воздействия) приведет к выходу ТС на эквидистантный заданной и опорной траекториям участок ЛП (от точки 4, фиг.1) для которого Δl ≠ 0.
Известен способ управления движением сельскохозяйственного агрегата по заданной траектории, основанный на измерении только ЛБО Δl. Этот способ реализует известный из теории автоматического управления [2] пропорциональный закон управления, согласно которому управляющее воздействие, прикладываемое к исполнительному органу системы управления, имеет вид
y C3 Δl (3)
с неизбежными при его реализации недостатками статической ошибкой и перерегулированием, которые в [1, c.38] отмечены следующим образом: "без точного и независимого от Δl измерения β не представляется возможным избавить машину от рыскания" (приведенные обозначения в ссылках здесь и далее наши, соответствующие фиг.1). Объяснение этому дано в [3, c.31]
Известен способ управления движением сельскохозяйственного агрегата, основанный на использовании управляющего сигнала, пропорционального сумме линейной и угловой координат Δl + β на практике имеющего вид
y C4(Δ l + β ) C4[( ϕт ϕзад) + β] (4)
что [1, c. 44] "очевидно, повышает качество управления, хотя тот факт, что непосредственное определение β исключено, говорит о невозможности обеспечения следящего движения машины без рыскания".
С нашей точки зрения очевидным здесь является лишь то, что этот способ также реализует пропорциональный закон управления, а повышение качества обусловлено тем, что двумерной (в данном случае) системе пропорционального связанного управления недостатки одномерной (в первом случае) системы присущи в меньшей степени.
Такие системы реализуются, например, в автомобилевождении при выполнении маневра "переставка", азключающегося в смещении ТС на некоторую величину в направлении, перпендикулярном направлению движения (т.е. на новую траекторию, эквидистантную прежней), и выполняемого путем увеличения β ) от нуля (например, в т. 5, фиг.1) до некоторого значения и последующего уменьшения его до нуля (участок 5.6, фиг.1) по мере уменьшения Δl, а также в самонаведении, в теории которого участок ЛП 5.6 (фиг.1) носит название "кривая погони".
В [3, c.32] предложен способ управления движением сельхозагрегата, основанный на независимом получении сигналов Δl и β ) и их независимом же и последовательном устранении. Здесь также реализовался бы пропорциональный закон, но такое управление, очевидно, нереализуемо, так как после устранения Δl невозможно поступательное движение строго по ЗТ с Δl≠ 0, хотя постепенно и снижающимся до нуля, и, наоборот, невозможно снижение β до нуля с последующим устранением Δl.
Тем не менее, способ, основанный на независимом определении ЛБО и УО будем считать наиболее близким к предлагаемому. Легко видеть, что все укaзанные выше способы пригодны для управления движением только непосредственно по опорной траектории, а не по эквидистантной ей заданной траектории, т.е. решают частную задачу для случая нулевой заданной дистанции (l 0).
Из всего многообразия общеизвестных способов определения дальности до материальных объектов (радиотехнические, радиолокационные, лазерные и др.) в практике управления движением наземных ТС, в частности сельскохозяйственных агрегатов, известно только прямое измерение ЛБО от независимых (провода с током, рядки растений) и зависимых ОТ [1, гл.4] [3, гл.3] реализуемое контактными и бесконтактными датчиками, установленными на выносимых за габариты машины сложных механических конструкциях.
Достоверность информации, получаемой при таких измерениях низка, а пределы измерений (величина измеряемого ЛБО) на практике малы.
Известен способ [1, c.67] определения ОУ ТС, заключающийся в измерении расстояний от некоторых точек а и b (фиг.2) ТС, лежащих на прямой, параллельной его продольной оси (или совпадающей с ней), расстояние между которыми lab, до их мест на ОТ a" и b" и реализации зависимости
sinβ ≈ β 

(5)
Способ не пригоден при использовании вынесенных вперед по ходу ТС НТ (a' и b', фиг. 2) целесообразность чего отмечена в [1, c.44] так как при этом треугольник abc становится косоугольным abc1, из всех элементов которого известна только одна сторона lab.
Известен способ получения сигнала, пропорционального сумме координат L и β ТС, заключающийся в измерении суммарного курсового угла ϕc (фиг.1) при сохранении постоянным расстояния r от места ТС на ЛП до ТНТ. Известны и реализующие его устройства, содержащие контактные электромеханические [1, c. 121-123] и бесконтактные сканирующие оптико-электронные датчики угла ϕc пропорциональный которому сигнал и используется в качестве управляющего.
Постоянство величины r при использовании электромеханических датчиков обеспечивается механическим устройством, на котором установлен чувствительный элемент. У оптико-электронных датчиков r радиус основания конуса, боковая поверхность которого описывается сканирующим лучом, остающийся постоянным при неизменной высоте установки датчика над поверхностью движения.
Угол ϕc представляет собой простую аддитивную сумму углов ϕт и β которая не дает никакого представления о величинах слагаемых или их соотношении (что отмечено в [1, c.46] "сигналы Δl и β неразделимы") и, следовательно, указанный способ не позволяет получить раздельно сигналы координат L и β.
Тем не менее, способ, заключающийся в измерении курсового угла одной ТНТ, находящейся на некотором фиксированном расстоянии от ТС является наиболее близким к предлагаемому способу определены угловой и линейной координат ТС.
Целью предлагаемого изобретения является улучшение качества управления снижение статической и динамической ошибок и времени переходного процесса движением ТС по траектории, эквидистантной опорной.
Указанная цель достигается тем, что в способе управления движением ТС, согласно которому получают раздельно сигналы расстояния от ТС до опорной траектории (сигнал текущей дистанции ТД) и углового отклонения ТС от ОТ, дополнительно формируют сигнал линейной координаты заданной траектории (сигнал заданной дистанции ЗД), вычитают сигнал ЗД из сигнала ТД, получают сигнал скорости поступательного движения ТС, умножают его на сигнал углового отклонения, суммируют разностный сигнал и сигнал произведения и воздействуют суммарным сигналом на исполнительный орган системы управления движением ТС.
Таким образом, управляющий сигнал, который может быть с учетом выражений (1) и (2) представлен в виде y C5(L-l)+C2V(t)β(t)=C6V(t)β(t)dt+C2V(t)β(t), (6)
а при V const в виде
y C6V∫β(t)dt + C2Vβ(t) (7)
пропорционален ЛБО и его производной, а также УО и его интегралу и описывает закон связанного управления пропорционально- дифференциального, обеспечивающего, как известно из теории автоматического управления, минимальное рассогласование по ЛБО и пропорционально-интегрального астатического с минимальной динамической ошибкой и временем переходного процесса по УО.
Легко видеть, что предлагаемый способ пригоден для управления движением как по опорной траектории (заданная дистанция l 0), так и по эквидистантной ей (l ≠ 0).
Очевидно также, что область применения предлагаемого способа может быть распространена на управление движением по ряду следующих друг за другом не совпадающих эквидистантных траекторий и(или) по криволинейной траектории, координаты которой относительно ОТ заранее заданы в функции пройденного ТС пути. С этой целью достаточно сигнал ЗД формировать в процессе движения ТС как дискретную или непрерывную функцию пройденного пути.
Указанная цель достигается также и тем, что в дополнение к известному измерению курсового угла одной ТНТ производят измерение КУ второй, не совпадающей с первой ТНТ, формируют сигналы, пропорциональные заранее определенным (по конструкции датчика курсового угла и высоте его установки на ТС над поверхностью движения) расстояниям до ТНТ1 и ТНТ2, а обработку сигналов производят в соответствии с выражениями
L 
(8)
β ϕ1(2)- 
(9) где ϕ1 ϕ2 КУ первой (ТНТ1) и второй (ТНТ2) навигационных точек;
r1, r2 расстояния до первой и второй ТНТ, r1 ≠ r2.
Покажем справедливость выражений (8) и (9). Обратимся к фиг.3а,б, где D1, D2 датчики, Н высота установки датчиков, α1 α2 углы установки датчиков, α2 α1 Δ α величина, определяющая разность r2-r1, остальные обозначения прежние.
Отметим здесь же, что должно выполняться неравенство l < r1 < r2, причем r1 должно быть больше l на некоторую величину Δl1, превосходящую любое допустимое рассогласование Δlmax и определяющую "зону захвата" (l ± Δl1, при этом Δl1 может быть и, как правило, больше l), в пределах которой может быть обнаружена ОТ и выработан сигнал для управления выходом на нее или ЗТ; при этом обеспечивается расположение ТНТ1 и ТНТ2впереди ТС, целесообразность чего уже отмечалась и следует из того, что, очевидно, нельзя вести ТС глядя, например, в сторону, а не вперед, причем тем дальше вперед, чем больше скорость ТС.
Для упрощения записи углы ϕт и ϕc будем считать малыми. Тогда
ϕт1=  ϕc1=
ϕc1=  + β, откуда β ϕc1-
+ β, откуда β ϕc1-  (10)
(10)
ϕт2=  ϕc2=
ϕc2=  + β, откуда β ϕc2-
+ β, откуда β ϕc2-  (11)
(11)
Из (9) и (10) следует, что
ϕc1-  ϕc2-
ϕc2-  или ϕc1-ϕc2=
или ϕc1-ϕc2= 
 L
L (12)
(12)
и L 
Подставив (12) в (10) или (11) получим
β ϕc1(2)-  или
или
β ϕc1(2)-  (13)
(13)
Разумеется, в формуле изобретения индексы "l" (ϕc1 ϕc2) могут быть опущены.
Проанализируем выражения (12) и (13) с точки зрения их технической реализации.
В качестве датчиков могут использоваться любые из упоминавшихся ранее, но наиболее перспективными авторы считают бесконтактные оптико-электронные датчики, вырабатывающие электрические сигналы, пропорциональные суммарному курсовому углу, получение разности которых пропорциональной Δ ϕ ϕc1 ϕc2 никакой сложности не вызывает.
Рассмотрим выражение  , которое, используя фиг.3,б, запишем в виде
, которое, используя фиг.3,б, запишем в виде (14)
(14)
Величины Н, α1 α2 выбираются из соображения возможности обнаружения датчиками ОТ на поверхности движения, при этом учитывается, что чем больше α2 α1 Δ α тем меньше отношение (14), определяющее чувствительность к рассогласованию γ отношение приращения выходного сигнала к приращению вызвавшего его рассогласования L или β ( γ1=  γ2=
γ2=  ).
).
Еще одно соображение по выбору Δ α будет приведено ниже. С учетом (14) выражения (12) и (13) можно записать в виде
L  Δϕ·H·f1(α) (15)
Δϕ·H·f1(α) (15)
β ϕc1-  ϕc1-Δϕ·f2(α) (16a)
ϕc1-Δϕ·f2(α) (16a)
или β ϕc2-  ϕc2-Δϕ·f3(α) (16б)
ϕc2-Δϕ·f3(α) (16б)
Пример реализующей соотношения (15)-(16,б) функциональной схемы приведен на фиг.4, где 7 задатчик сигналов H, f1( α) и f2( α) или f3( α) устройство, содержащее, например, три потенциометра, сигналы которых выставляются после установки датчиков на ТС, и блоки вычитания, перемножения и деления этих сигналов; 8, 9, 10 устройства перемножения сигналов; остальные обозначения те же, что и выше и общепринятые. Отметим еще, что предлагаемый способ, как это следует из выражений (8, 9; 12, 13; 15, 16) обеспечивает определение координат той точки ТС, в которой или над которой установлены датчики.
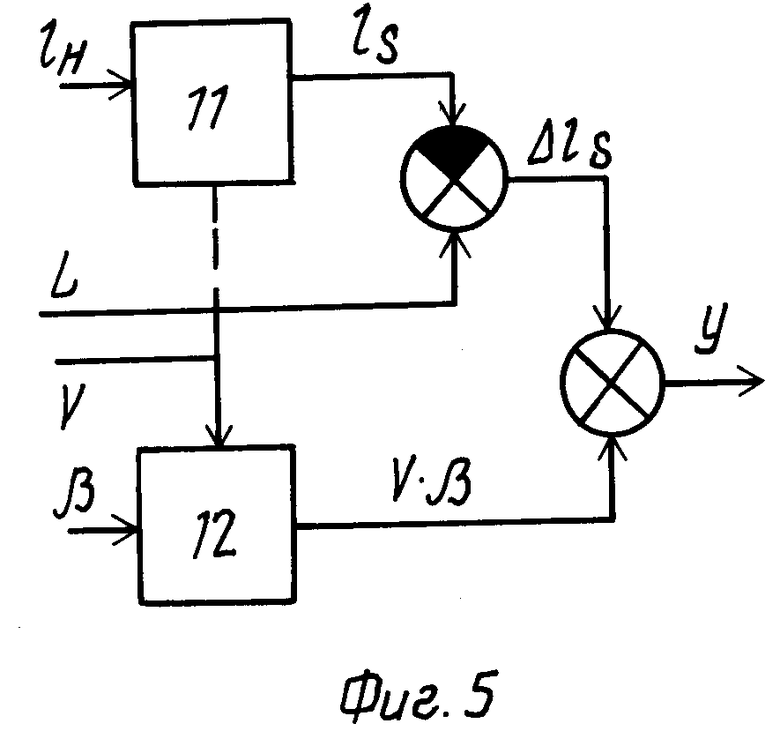
На фиг.5 приведена функциональная схема устройства, реализующего предлагаемый способ, описываемый выражением (6).
Здесь: lн заданная дистанция первой эквидистантной траектории или начальная координата неэквидистантной траектории; ls постоянный или меняющийся сигнал ЗД, Δls сигнал ЛБО, L, β сигналы ТД и УО, V сигнал скорости поступательного движения ТС, у управляющий сигнал, 11 задатчик сигнала ЗД, 12 множитель.
Предлагаемый способ управления может быть реализован полностью автоматической системой управления, в состав которой должна входить рулевая машина, поворачивающая управляющие колеса, или автоматизированной системой управления, в которой управляющий сигнал подается, например, на стрелочный индикатор, установленный в кабине водителя, производящего поворот управляющих колес по его показаниям вручную.
Если устройство (фиг.5) предназначено для управления движением по одной эквидистантной траектории, то задатчик сигнала 11 может содержать, например, потенциометр, сигнал которого выставляется перед началом движения пропорционально заданной дистанции. При этом в случае, например, необходимости объезда препятствия, водитель может брать управление на себя или вручную менять сигнал ЗД.
Если устройство предназначено для управления движением по ряду следующих друг за другом эквидистантных траекторий со сменой их в процессе движения в функции пройденного пути или по неэквивалентной, заранее заданной прямолинейной или криволинейной траектории, задатчик 11 содержит интегратор-датчик пути, на который подается сигнал V, потенциометр-задатчик начальной дистанции, блок хранения программы и блок изменения сигнала ЗД.
Все представленные на фиг. 4,5 блоки являются типовыми узлами промэлектроники, поэтому разработка электрических схем, соответствующих этим функциональным на доступной элементной базе представляет собой несложную инженерную задачу.
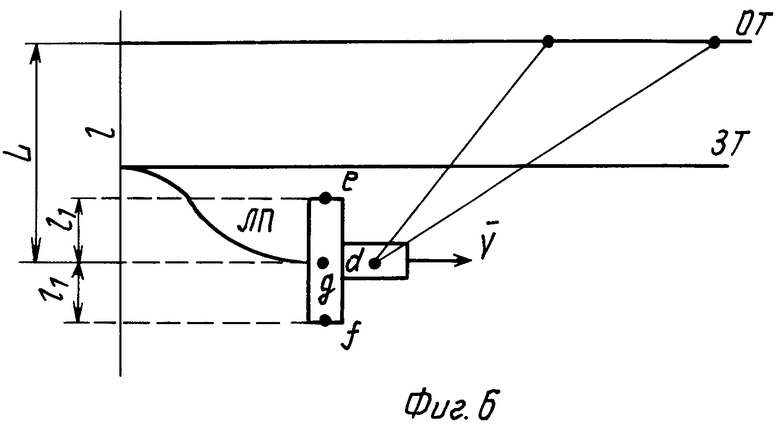
Предложенный способ управления предназначен для обеспечения эквидистантного движения той точки ТС, координаты которой определены по предложенному способу, т.е. точки, в которой или над которой установлены датчики. Следовательно, если должно быть обеспечено эквидистантное движение точки ТС, не совпадающей с указанной, например, точки l (фиг.6, где, кроме того, показаны: возможная точка d установки датчиков на буксировщике или одиночной машине, точка f эквидистантное движение которой должно быть обеспечено, например, при обратном проходе при челночном движении ТС, l1 расстояние между точками d и е, d и f, g возможная точка установки датчиков на буксируемом агрегате, остальные обозначения те же), тогда заданная дистанция l должна быть увеличена на величину l1. Действительно, как следует из фиг.6, ЛБО точки e Le L-l1 и после подстановки в первое слагаемое правой части выражения (6) получим [(L-l1)-l] L-(l+l1). В этом случае с помощью задатчика 11 (фиг. 5) в блок управления должен вводиться сигнал lse, соответствующий lнe l+l1. Сказанное справедливо для ТС одиночной машины или жестко связанного с ней агрегата, когда величина l1 может быть определена заранее, причем в последнем случае датчики могут быть установлены как на буксировщике, так и, например, в точке g (фиг.6) прицепа. В случае же не жесткой связи между буксировщиком и прицепом, когда величина l1 не является постоянной за счет возможного линейного смещения их относительно друг друга и, следовательно, не может быть учтена при задании сигнала lse, очевидно, что датчики следует устанавливать на прицепном агрегате.
Отметим еще, что если технические характеристики датчиков не позволяют при установке их на оси симметрии ТС (в точках d или g) одной их парой определять координаты при прямом и обратном проходах, то предлагаемый способ управления можетбыть реализован с использованием двух пар датчиков, расположенных по краям ТС (в точках е и f) и поочередно подключаемых к входу блока выработки координат (фиг.4).
В качестве примера реализации предлагаемых способов рассмотрим работу автоматизированной СУ, в которой управляющий сигнал подается на индикатор (в простейшем случае электромеханический стрелочный), воспроизводящий его с минимальными искажениями и запаздыванием, по показаниям которого водитель вручную осуществляет поворот управляющих колес ТС, т.е. выполняет функцию их привода. Вначале датчики устанавливают на ТС над той его точкой ("заданная точка"), эквидистантное движение которой должно быть обеспечено, и с помощью задатчиков блока выработки координат и блока управления (конструктивно они объединены в один прибор, устанавливаемый в кабине водителя) вводят по заранее подготовленным таблицам или графикам (в случае промышленного изготовления реализующей предлагаемые способы СУ они приводятся в инструкции по эксплуатации) исходные сигналы.
Подводят ТС к началу ОТ и устанавливают таким образом, чтобы управляющий сигнал (отклонение стрелки индикатора) стал равен нулю после некоторых колебаний, свидетельствующих о том, что датчики "захватали" ОТ, что будет свидетельствовать о том, что ТС (его заданная точка) находится на заданном расстоянии l от 01 и что угловое отклонение отсутствует. Управляющие колеса ТС приводят в нейтральное положение, после чего можно начинать движение.
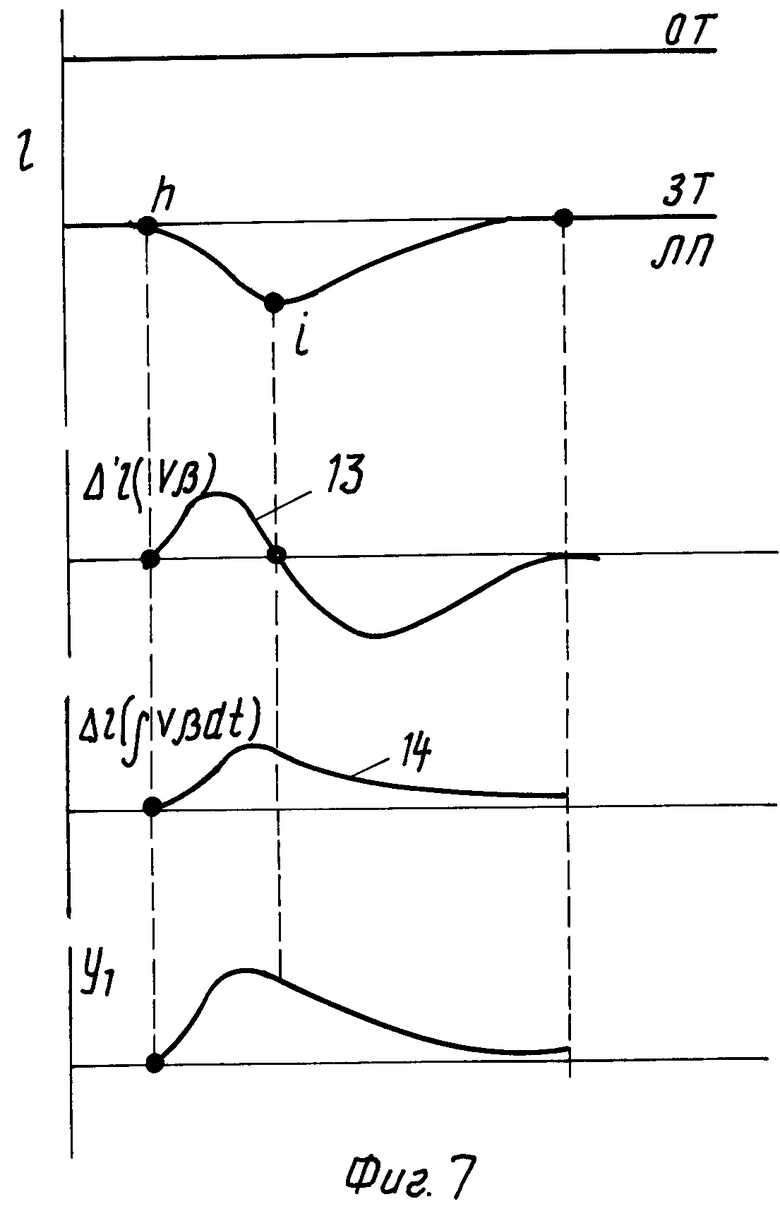
Пусть в процессе движения за счет возмущающих воздействий возникло отклонение управляющих колес и, начиная с некоторой точки h заданной траектории (фиг. 7) заданная точка ТС начала отклоняться от ЗТ с нарастающими УО и ЛБО начала двигаться по реальной 11. При этом будут выработаны сигналы УОβ и ЛБО Δl и на индикатор поступит сумма сигналов 13 пропорционального Δl Vβ и 14 пропорционального Δl ∫Vβdt, являющаяся управляющим сигналом в автоматической СУ и пропорциональное которой отклонение стрелки индикатора у1 будет "управляющим сигналом" в описываемой "индикаторной" системе.
При появлении этого сигнала водитель начнет возвращать управляющие колеса сначала в нейтральное положение, а потом, чтобы уменьшить управляющий сигнал, разворачивать их в сторону, противоположную отклонению, вызванному возмущением. В результате этого УО начнет уменьшаться и к точке i (фиг.7) ЛП ТС придет с Δl > 0, β 0 и развернутыми управляющими колесами, что приведет к появлению и росту УО противоположного знака, сигнал которого будет вычитаться из сигнала Δl, в свою очередь, уменьшающегося за счет приближения заданной точки ТС к ЗТ.
Уменьшение управляющего сигнала, тенденция к которому может обозначиться еще до точки i (фиг.7) в зависимости от соотношения коэффициентов преобразования С1 и С2 (см. выражения 1,2) каналов Δl и Δl и которое является задачей водителя, приведет к тому, что последний вновь начнет возвращать управляющие колеса в нейтральное положение, в результате чего ТС подойдет к некоторой точке j ЛП с β=0, Δl 0 и управляющими колесами, выведенными в нейтральное положение и будет двигаться дальше по ЗТ. Таким образом, большая величина управляющего сигнала в точках h и i и следовательно, высокий темп разворота управляющих колес на соответствующих им участках ЛП способствует минимизации времени (соответственно, и участка ЗТ) устранения рассогласования, выход за ЗТ с одновременным выводом управляющих колес в нейтральное положение исключает динамическую ошибку (рыскание ТС относительно ЗТ), а пропорциональность управляющего сигнала интегралу сигнала УО устраняет и статическую ошибку (делает систему астатической). Очевидно, что действия водителя ТС, оснащенного такой автоматизированной СУ ничем не отличаются от действий водителя, ориентирующегося по внешним ориентирам (полосе дорожной разметки и др.) и выполняющего маневр "переставка", поэтому можно надеяться, что для опытного водителя переход от "визуального" управления к управлению "по индикатору" не будет слишком трудным. Использование таких "индикаторных" СУ целесообразно, когда в силу каких-то причин (например, значительное удаление ЗТ от ОТ при управлении движением широкозахватных посевных агрегатов) визуальная ориентировка не обеспечивает достаточной точности управления и невозможно (или нецелесообразно) оснащать ТС рулевой машиной, т.е. превращать СУ в автоматическую.
Предложенный способ определения координат ТС благодаря наличию двух датчиков использующих не совпадающие ТНТ, делает возможной реализацию известного [1, c.117] способа сглаживания случайных искривлений ОТ и фильтрации помех (например, комьев земли и т.п.), маскирующих отдельные участки ОТ. Для этого необходимо лишь незначительное усложнение блока выработки координат и выбор Δ α α2 α1 (фиг.3,б), обеспечивающий достаточное расстояние между текущими навигационными точками.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КООРДИНАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ И КОМПЛЕКСНОГО КОНТРОЛЯ ЗА БЕЗОПАСНОСТЬЮ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2457544C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2723976C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 2004 |
|
RU2266571C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ КУРСОВОГО УПРАВЛЕНИЯ МОБИЛЬНОЙ МАШИНОЙ ПРИ ДВИЖЕНИИ ПО ТРАЕКТОРИИ ПРОИЗВОЛЬНОЙ ФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298216C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| УСТРОЙСТВО ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДА И СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ТРУБОПРОВОДА ПО РЕЗУЛЬТАТАМ ДВУХ И БОЛЕЕ ИНСПЕКЦИОННЫХ ПРОПУСКОВ ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДА | 2013 |
|
RU2558724C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
Ия предназначены для управления движением, преимущественно, наземных транспортных средств (ТС), в том числе и прицепных, с постоянным, в том числе и равным нулю, или изменяющимся по заданному закону расстоянием от некоторой физически заданной на поверхности движения опорной траектории (ОТ) - границы обработанного участка поля, полосы дорожной разметки и т.п. Способ определения линейно-бокового (ЛБО) L и углового (УО) β отклонения ТС от ОТ заключается в том, что измеряют с помощью двух оптико-электронных, магнитных или иных датчиков курсовые углы двух не совпадающих "текущих навигационных точек (ТНТ)" опорной траектории, а L и b определяют по выражениям 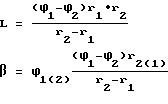 , где ϕ1, ϕ2 - измеренные курсовые углы; r1, r2 - растояния до навигационных точек, r1≠ r2 Наличие раздельной информации о координатах L и β позволяет реализовать пропорционально- интегральное по угловому и пропорционально-дифференциальное по линейному отклонению ТС от заданной траектории (ЗТ) управление с пониженными статической и динамической ошибками и временем переходного процесса, для чего формируют и поддерживают постоянным или изменяют по заданному закону сигнал, пропорциональный расстоянию между опорной и заданной траекториями, вычитают этот сигнал из сигнала ЛБО, получают сигнал скорости поступательного движения ТС, перемножают сигналы УО и скорости, суммируют указанные разностный сигнал и сигнал произведения и производят соответствующее величине и знаку суммарного сигнала воздействие на управляющие колеса Т.С. Использование не совпадающих ТНТ позволяет также сглаживать при челночном движении случайные искривления ОТ. 2 с. и 2 з.п. ф-лы, 7 ил.
, где ϕ1, ϕ2 - измеренные курсовые углы; r1, r2 - растояния до навигационных точек, r1≠ r2 Наличие раздельной информации о координатах L и β позволяет реализовать пропорционально- интегральное по угловому и пропорционально-дифференциальное по линейному отклонению ТС от заданной траектории (ЗТ) управление с пониженными статической и динамической ошибками и временем переходного процесса, для чего формируют и поддерживают постоянным или изменяют по заданному закону сигнал, пропорциональный расстоянию между опорной и заданной траекториями, вычитают этот сигнал из сигнала ЛБО, получают сигнал скорости поступательного движения ТС, перемножают сигналы УО и скорости, суммируют указанные разностный сигнал и сигнал произведения и производят соответствующее величине и знаку суммарного сигнала воздействие на управляющие колеса Т.С. Использование не совпадающих ТНТ позволяет также сглаживать при челночном движении случайные искривления ОТ. 2 с. и 2 з.п. ф-лы, 7 ил.
где ϕ1,ϕ2 измеренные курсовые углы первой и второй текущих навигационных точек соответственно;
r1, r2 расстояния до первой и второй текущих навигационных точек соответственно, r1 ≠ r2.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Калоев А.В | |||
| Основы проектирования систем автоматического вождения самоходных машин | |||
| - М.: Машиностроение, 1978, с.32. | |||
