Изобретение относится к водному транспорту и касается управления движущимся объектом при выполнении им сближения с другим подвижным объектом, например судном, по величине поперечных смещений двух точек судна.
Известны способ и устройство для управления движением судна при выполнении сближения по заданной траектории (А.с. №1295935, №1367730, №1424538), основанный на перекладке руля направления судна, выполняющего сближение, по величине отклонения текущего значения курсового угла на заданную точку (ЗТ), измеренного с помощью судовой радиолокационной станции (РЛС), от заданного значения курсового угла на ЗТ. При этом курс и скорость ЗТ, в данном случае условная точка, в пределах контура швартующего судна имеют постоянные значения во время выполнения сближения.
Однако в этом способе управления судном, выполняющим сближение с ЗТ, есть определенные недостатки, препятствующие использованию его в других случаях сближения двух объектов, например судна и ЗТ:
- ЗТ может быть объектом, не наблюдаемым с помощью РЛС, в частности, когда ЗТ является подводным объектом или просто точкой на плоскости, имеющей заданные координаты, в которые должно выйти судно, осуществляющее сближение, в конце маршрута сближения;
- ЗТ может быть объектом, не постоянно наблюдаемым с помощью РЛС, например, при попадании ЗТ в теневую зону РЛС, а также в зону плотных атмосферных осадков;
- если сближение происходит в условиях воздействия морских волн на судно, осуществляющее сближение с ЗТ, точность удержания его на заданной траектории существенно снижается, так как измеренный с помощью РЛС текущий курсовой угол на ЗТ будет иметь большую погрешность, соизмеримую со значением самого курсового угла, вследствие рыскания судна на волнении;
- точность сближения зависит от технических свойств ЗТ как физического объекта, например из-за его низкой отражательной способности;
- на судно, осуществляющее сближение с неподвижной ЗТ, действуют внешние факторы (ветер, течение, волнение), параметры которых (направление, скорость и др.), как правило, трудно определимы количественно или вообще не поддаются определению из-за их случайного характера, поэтому судно имеет снос с переменным направлением и скоростью, при этом, если считать ЗТ условно подвижной с условными параметрами движения (условная скорость, условный курс), равными параметрам суммарного сноса судна, но с обратным знаком, то условная скорость и условный курс ЗТ будут изменяться в процессе сближения.
Известен способ управления движением объекта, например судном, по величине поперечных смещений расположенных на диаметральной плоскости судна кормовой и носовой точек от заданной траектории, при котором рассчитывают поперечные смещения этих точек от заданной траектории, для вычисления поперечных смещений кормовой и носовой точек используют их координаты, которые измеряют с помощью спутниковой навигационной системы и с дифференциальными поправками, производят перекладку руля в зависимости от комбинации поперечных смещений носовой и кормовой точек (Пат. РФ №2263606, опубл. 10.11.2005, В63Н 25/00). Данный способ предусматривает наличие известного положения траектории, т.е. наличие заданной траектории. Поэтому этот способ невозможно использовать для управления движением судна при выполнении им сближения с другим подвижным объектом, так как в процессе сближения с подвижным или условно подвижным объектом, например с ЗТ, траектория постоянно меняет свое положение на плоскости, причем в общем случае, если параметры движения (курс, скорость) объекта, с которым осуществляют сближение, неизвестны, то положение траектории не может быть рассчитано заранее. Следовательно, текущие значения поперечных смещений двух точек судна от текущего положения траектории не могут быть рассчитаны без определения его текущего положения.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в повышении точности удержания объекта на траектории сближения с другим подвижным объектом и улучшении качества управления, выражаемого в уменьшении количества переключений руля в единицу времени.
Для достижения указанного технического результата в способе управления подвижным объектом при выполнении им сближения с другим подвижным объектом по величинам поперечных смещений, расположенных на диаметральной плоскости судна кормовой и носовой точек от траектории, при котором рассчитывают поперечные смещения этих точек, для вычисления поперечных смещений кормовой и носовой точек используют их координаты, которые измеряют с помощью спутниковой навигационной системы и с дифференциальными поправками, производят перекладку руля в зависимости от комбинации поперечных смещений носовой и кормовой точек, дополнительно используют заданную точку на плоскости в направлении сближения судна с другим подвижным объектом и центр тяжести судна, причем через эти точки проходит траектория сближения, определяют координаты заданной точки, рассчитывают координаты центра тяжести судна по формулам:
Y0G=Y0A-[(Y0A-Y0В)*(ХA-ХG)]/(ХA-ХВ);
X0G=ХOA-[(Х0A-Х0B)*(ХA-ХG)]/(ХA-ХВ),
где XG - абсцисса центра тяжести судна в координатной системе, связанной с судном;
ХА, ХB - абсциссы соответственно носовой точки и кормовой точки в координатной системе, связанной с судном;
Х0А, Y0A - координаты носовой точки в неподвижной системе координат;
Х0B, Y0B - координаты кормовой точки в неподвижной системе координат,
затем определяют положение траектории сближения на основе данных о координатах заданной точки и центра тяжести, а потом поперечные смещения кормовой и носовой точек от найденного положения траектории сближения.
При этом заданная точка может быть подвижной или условно подвижной. Координаты заданной точки измеряют с помощью спутниковой навигационной системы и с дифференциальными поправками.
Отличительными признаками предлагаемого способа от указанного выше известного, наиболее близкого к нему, являются следующие: дополнительно используют заданную точку на плоскости в направлении сближения судна с другим подвижным объектом и центр тяжести судна, причем через эти точки проходит траектория сближения, определяют координаты заданной точки, рассчитывают координаты центра тяжести судна по формулам:
Y0G=Y0A-[(Y0A-Y0B)*(ХА-ХG)]/(ХА-ХB);
X0G=Х0А-[(Х0А-Х0B)*(ХА-ХG)]/(ХA-ХB),
где XG - абсцисса центра тяжести судна в координатной системе, связанной с судном;
ХА, ХB - абсциссы соответственно носовой точки и кормовой точки в координатной системе, связанной с судном;
Х0А, Y0A - координаты носовой точки в неподвижной системе координат;
Х0B, Y0B - координаты кормовой точки в неподвижной системе координат,
затем определяют положение траектории сближения на основе данных о координатах заданной точки и центра тяжести, а потом поперечные смещения кормовой и носовой точек от найденного положения траектории сближения.
При этом заданная точка может быть подвижной или условно подвижной. Координаты заданной точки измеряют с помощью спутниковой навигационной системы и с дифференциальными поправками. Благодаря наличию этих признаков при постоянно меняющемся положении траектории сближения судна с другим подвижным объектом его можно фиксировать в любой заданный момент времени, зная же координаты носовой и кормовой точек, непрерывно вычисляют поперечные смещения этих точек от найденного положения траектории сближения и производят перекладку руля в зависимости от комбинации этих смещений, таким образом, повышается точность удержания судна на траектории сближения с другим подвижным объектом.
Предлагаемый способ иллюстрируется чертежами, представленными на фиг.1-4, где обозначено:
1 - судно; 2 - траектория сближения; 3 - руль; 4 - диаметральная плоскость судна.
Сближение судна с ЗТ может быть осуществлено, если в процессе сближения траектория судна, которое выполняет сближение с ЗТ, будет постоянно проходить через ЗТ и точку в пределах контура судна [1, 2] (фиг.1), поэтому изменяющееся положение траектории сближения на плоскости можно фиксировать в любой заданный момент времени, непрерывно определяя координаты двух точек, через которые проходит траектория сближения. Первая точка - это точка установки судовой приемной антенны спутниковой навигационной системы (СНС).
Если на судне установлены две антенны СНС, разнесенные по длине, то выбирают условную точку, расположенную на отрезке между точками установки носовой антенны СНС, точкой А, и кормовой антенны СНС, точкой В, в частности, в качестве условной точки в данном случае выбран центр тяжести (ЦТ) G судна, так как его положение достаточно точно определено на отрезке АВ (фиг.2). При этом, если в непрерывном режиме определяют координаты точек А(Х0A, Y0A) и В(Х0B, Y0B) в неподвижной системе координат Х0-Y0, координаты центра тяжести (ЦТ) G судна в той же системе координат рассчитывают по формулам:


где XG - абсцисса ЦТ судна в координатной системе, связанной с судном;
ХА, ХB - абсциссы точки А и В, соответственно, в той же координатной системе.
Вторая точка - это ЗТ, то есть конечная точка маршрута сближения.
Если ЗТ неподвижна относительно Земли и условно подвижна в процессе сближения за счет сноса судна, ее координаты будут иметь фиксированные значения, которые должны быть известны на судне, осуществляющем сближение с ЗТ, для расчета положения траектории сближения в непрерывном режиме. В этом случае ЗТ может быть как наблюдаема, так и не наблюдаема визуально с судна.
Если ЗТ находится в постоянном движении, для определения положения траектории сближения, на судно, осуществляющее сближение с ЗТ, непрерывно поступают координаты ЗТ, передаваемые тем или иным способом с объекта, например судна, в пределах контура которого находится ЗТ или с объекта, с которым условно жестко связана ЗТ. Например, если судно осуществляет сближение с другим судном (швартовка одного судна к другому судну в условиях открытого моря), в качестве ЗТ может быть выбрана любая условная точка на линии, расположенной параллельно диаметральной плоскости (ДП) швартующего судна, в пределах его длины, на определенном заданном расстоянии от ДП и за пределами контура швартующего судна.
В случае, когда получить координаты ЗТ на судне, осуществляющем сближение с ней, извне невозможно, они могут быть рассчитаны, используя один из известных навигационных способов определения положения объекта сближения относительно судна. В частности, положение ЗТ относительно судна, осуществляющего сближение, а следовательно, и координаты ЗТ могут быть определены по пеленгу и дистанции.
Предлагаемый способ осуществляют следующим образом. В пределах контура судна, в его диаметральной плоскости (ДП) выбирают две точки, одна из которых расположена к носу судна (точка А на фиг.1), а другая - к корме судна (точка В на фиг.1) относительно плоскости мидель-шпангоута. Расстояние между точками А и В выбирают в зависимости от технической возможности размещения в этих точках приемных антенн СНС. Чем больше это расстояние, тем качественнее работа системы управления движением судна, осуществляющего сближение с ЗТ.
Координаты этих точек определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки [3]. Определяют координаты заданной точки (ЗТ), рассчитывают координаты центра тяжести (ЦТ) G по формулам (1) и (2). Зная координаты ЗТ и ЦТ G, определяют положение траектории сближения, проходящей через ЗТ и ЦТ G. После этого определяют поперечные смещения точек А и В от найденной траектории сближения.
Значения координат позволяют непрерывно вычислять поперечные смещения точки А ((dA) и точки В (dB) от текущего положения траектории сближения (фиг.1). Причем поперечное смещение рассматриваемой точки от траектории сближения считается положительным, если она смещается вправо, и отрицательным, если она смещается влево (фиг.3, 4).
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля судна, по закону:

где kA, kB - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от траектории сближения. Это положительные величины, причем kA больше kB. Угол перекладки α руля 3 считается положительным при его перемещении в сторону правого борта.
На фиг.3, 4 изображены варианты возможных отклонений судна 1 от траектории сближения 2 и управление в каждом из них (угол перекладки α руля 3). Например, на фиг.3, 4 ДП 4 судна 1 пересекает траекторию сближения 2 под некоторым углом, величина которого характеризуется значениями поперечных смещений точки A ((dA) и точки В ((dB), причем dA больше 0, dB меньше 0 (фиг.3) и dA меньше 0, dB больше 0 (фиг.4). В первом случае (фиг.3) согласно закону (3) угол отклонения α руля 3 будет иметь отрицательное значение, т.е. руль будет переложен на левый борт и судно начнет поворот влево, что приведет к уменьшению dA и dB и в конечном итоге к выходу судна на траекторию сближения; во втором случае (фиг.4) согласно закону (3) угол отклонения α руля 3 будет иметь положительное значение, т.е. руль будет переложен на правый борт и судно начнет поворот вправо, что приведет к уменьшению dA, dB и к выходу судна на траекторию сближения.
Значения отклонений точек А и В от траектории сближения (ЛП) определяют по формулам:


где Х0T, Y0T - координаты ЗТ в неподвижной системе координат.
Х0A, Y0A - координаты точки А в неподвижной системе координат;
Х0B, Y0B - координаты точки В в неподвижной системе координат.
Y0G, X0G - координаты ЦТ в неподвижной системе.
После определения поперечных смещений точек А и В от найденного положения траектории сближения осуществляют перекладку руля 3 в зависимости от комбинации этих смещений.
В результате применения данного изобретения достигается возможность получения технического результата - повышения качества управления и точности выполнения маневра сближения одного подвижного на плоскости объекта с другим подвижным объектом, например, одного судна с другим подвижным судном, таким образом, предлагаемый способ управления движением объекта при выполнении его сближения с другим подвижным объектом соответствует критерию патентоспособности «промышленная применимость».
Литература
1. Локк А.С. Управление снарядами / А.С.Локк: пер. с англ. Г.В.Коренева. - М.: Физматгиз, 1958. - 776 с. - (Основы проектирования управляемых снарядов).
2. Юдин Ю.И. Совершенствование управления судном при выполнении швартовных операций на ходу в открытом море: Диссертация на соискание ученой степени к. т. н. - Л., 1987. - 187 с. (ЛВИМУ им. адм. С.О.Макарова).
3. Липкин И.А. Спутниковые навигационные системы. - М.: Вузовская книга, 2001. - 215 с.
Изобретение относится к водному транспорту и касается управления движением объекта, например судна, при выполнении им сближения с другим подвижным объектом. В способе управления используют заданную точку на плоскости в направлении сближения судна с другим подвижным объектом и центр тяжести судна. Определяют координаты заданной точки и рассчитывают координаты центра тяжести судна, на основе этих данных определяют положение траектории сближения. Определяют координаты носовой и кормовой точек, на основе их рассчитывают поперечные смещения носовой и кормовой точек от найденного положения траектории сближения и производят перекладку руля в зависимости от комбинации этих смещений. Технический результат заключается в повышении точности удержания объекта на траектории сближения с другим подвижным объектом и в улучшении качества управления, выражаемого в уменьшении количества переключений руля в единицу времени. 2 з.п. ф-лы, 4 ил.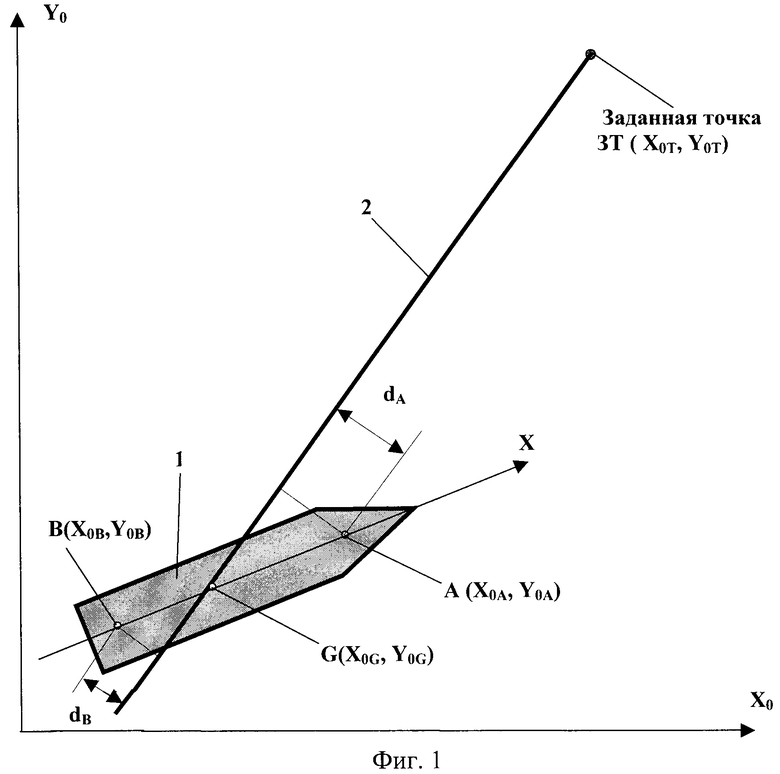
1. Способ управления движением объекта, например судна, при выполнении им сближения с другим подвижным объектом, например судном, по величинам поперечных смещений расположенных на диаметральной плоскости судна кормовой и носовой точек от траектории, при котором рассчитывают поперечные смещения этих точек, для вычисления поперечных смещений кормовой и носовой точек используют их координаты, которые измеряют с помощью спутниковой навигационной системы и с дифференциальными поправками, производят перекладку руля в зависимости от комбинации поперечных смещений носовой и кормовой точек, отличающийся тем, что дополнительно используют заданную точку на плоскости в направлении сближения судна с другим подвижным объектом и центр тяжести судна, причем через эти точки проходит траектория сближения, определяют координаты заданной точки, рассчитывают координаты центра тяжести судна по формулам
Y0G=Y0A-[(Y0A-Y0В)·(ХA-ХG)]/(ХA-ХВ);
X0G=Х0A-[(Х0A-Х0B)·(ХA-ХG)]/(ХA-ХВ),
где XG - абсцисса центра тяжести судна в координатной системе, связанной с судном;
ХА, ХB - абсциссы соответственно носовой точки и кормовой точки в координатной системе, связанной с судном;
Х0A, Y0A - координаты носовой точки в неподвижной системе координат;
X0B, Y0B - координаты кормовой точки в неподвижной системе координат;
затем определяют положение траектории сближения на основе данных о координатах заданной точки и центра тяжести, а потом - поперечные смещения кормовой и носовой точек от найденного положения траектории сближения.
2. Способ по п.1, отличающийся тем, что заданная точка может быть подвижной или условно подвижной.
3. Способ по п.1, отличающийся тем, что координаты заданной точки измеряют с помощью спутниковой навигационной системы и с дифференциальными поправками.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2004 |
|
RU2263606C1 |
| Способ управления траекторией движения судна | 1982 |
|
SU1062129A1 |
| Способ управления траекторией движения судна | 1983 |
|
SU1102714A1 |
| Способ синтеза диаграммы направленности широкополосной антенны с нулями в заданных направлениях | 1988 |
|
SU1716585A1 |

