Изобретение относится к области транспортного машиностроения и может быть использовано при автоматизации работ по поверхностям с произвольно меняющимися углами наклона.
Известно транспортное средство (пат. США N 3682265, кл. 180-9, 1972), которое содержит корпус с приводами, связанными с захватами. Это устройство не может переходить с одной поверхности на другую.
Прототипом является транспортное средство, содержащее два бедра и две голени, связанные между собой поворотными узлами, причем голени жестко связаны с опорами. Известное устройство не обладает высокой маневренностью при выполнении перехода в автоматическом режиме с одной поверхности на другую.
Цель изобретения повышение маневренности при выполнении перехода в автоматическом режиме.
Указанная цель достигается тем, что устройство, содержащее два бедра и две голени, связанные между собой поворотными узлами, причем голени жестко связаны с опорами, снабжено двумя датчиками определения наличия поверхности перемещения, каждый из которых расположен на торце кронштейна, закрепленного на голенях по ходу движения и под углом к оси транспортного средства. Проекция длины кронштейна на ось транспортного средства равна радиусу опоры, а длина бедер равна L= +
+  где А длина голени, R радиус опоры, а D диаметр поворотного узла между бедрами. Опоры выполнены в виде вакуумных захватов, а поворотные узлы в виде моментных цилиндров.
где А длина голени, R радиус опоры, а D диаметр поворотного узла между бедрами. Опоры выполнены в виде вакуумных захватов, а поворотные узлы в виде моментных цилиндров.
Введение датчиков и новое конструктивное выполнение бедер позволяют реализовать автоматический режим перехода с одной поверхности на другую.
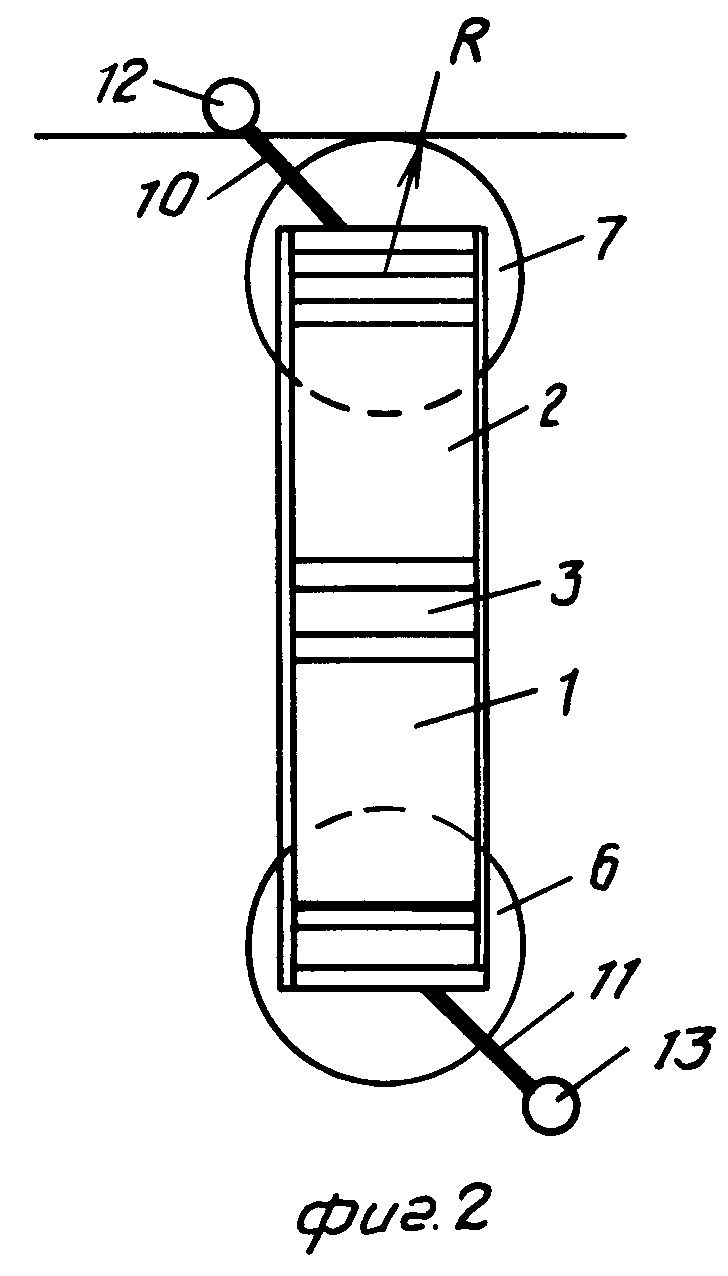
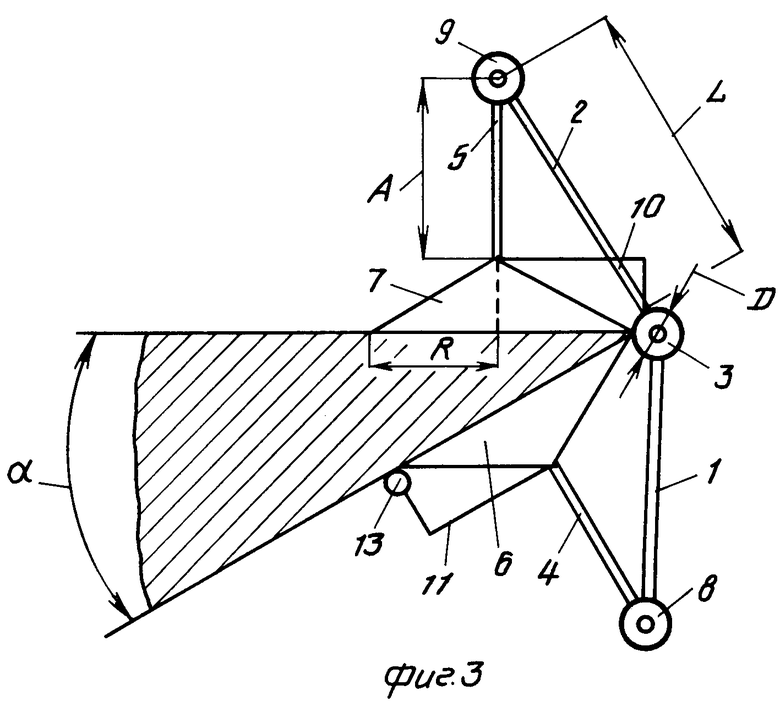
На фиг. 1 приведена схема устройства; на фиг. 2 схема расположения датчиков; на фиг. 3 схема перехода.
Устройство содержит бедра 1 и 2, соединенные через поворотный узел 3, каждое из которых связано по меньшей мере с одной из голеней 4 и 5, снабженных опорами в виде вакуумных захватов 6 и 7. Горелки 4 и 5 связаны с бедрами 1 и 2 соответственно поворотными узлами 8 и 9. На опорах 6 и 7 закреплены по ходу движения устройства под углом к его оси кронштейны 10 и 11, на торцах которых находятся датчики 12 и 13 определения наличия поверхности. Они могут представлять собой как контактные датчики типа щупов с конечными выключателями, так и бесконтактные датчики типа локационных струйных датчиков, способных определять край поверхности перемещения устройства. Проекция длины кронштейнов 10 и 11 на продольную ось устройства равна радиусу захватов 6 и 7. Длина бедер 1 и 2 равна L= +
+  , где А длина голеней 4 и 5, R радиус захватов 6 и 7, а D диаметр поворотного узла 3.
, где А длина голеней 4 и 5, R радиус захватов 6 и 7, а D диаметр поворотного узла 3.
Устройство работает следующим образом. При перемещении по плоскости захваты 6 и 7 с помощью узлов 3, 8 и 9 поочередно перемещаются в направлении движения. Во время перемещения одного захвата, другой фиксируется на поверхности путем подачи в него вакуума, что стабилизирует конструкцию при движении. В перемещаемом захвате вакуум отсутствует, что позволяет ему двигаться вдоль поверхности, обеспечивая отслеживание наличия поверхности перед собой с помощью установленного на нем датчика.
В момент сигнала с датчика 12 (при движении вправо на фиг. 1) об отсутствии поверхности перемещения захват 7 автоматически фиксируется у края поверхности (фиг. 3), благодаря заданным размерам кронштейна 10. После этого снимается вакуум с захвата 6, и узел 9 переводит узел 3 на край поверхности, что гарантируется заданной длиной бедра 2 с учетом диаметра узла 3. Затем узлы 3 и 8 перемещают бедро 1 голень 5 до срабатывания датчика 13, фиксирующего наличие новой поверхности под захватом 6. Алгоритм движения перехода не зависит от угла между поверхностями. Далее подается вакуум в захват 6, снимается вакуум в захвате 7 и соответствующим поворотом узлов 9, 3 и 8 голень 4 перемещается на новую поверхность до получения сигнала о ее наличии с датчика 12. После этого производится движение по новой поверхности. Оперативное изменение направления движения при перемещении по плоскости осуществляется с помощью узлов поворота 8 или 9 при соответственно зафиксированных опорах.
Таким образом, достигается повышенная маневренность при выполнении перехода механизма с одной поверхности на другую в автоматическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ ТРАНСПОРТНЫЙ МЕХАНИЗМ | 1996 |
|
RU2092367C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1996 |
|
RU2092369C1 |
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2098337C1 |
| ШАГАЮЩИЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2042559C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1992 |
|
RU2042558C1 |
| СИСТЕМА УПРАВЛЕНИЯ ШАГАЮЩИМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1990 |
|
RU1739607C |
| ОРТОПЕДИЧЕСКИЙ АППАРАТ | 1997 |
|
RU2119310C1 |
| СТАН ДЛЯ ИЗГОТОВЛЕНИЯ ОСЕСИММЕТРИЧНЫХ ДЕТАЛЕЙ | 1997 |
|
RU2134175C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
Использование: при автоматизации работ на поверхностях с произвольно меняющимися углами наклона. Цель изобретения - повышение маневренности и возможность выполнения перехода в автоматическом режиме. При движении по плоскости захваты 6 и 7 с помощью узлов 3, 8 и 9 поочередно перемещаются в требуемом направлении. Во время перемещения одного захвата другой фиксируется на поверхности путем подачи в него ваккуума, что стабилизирует конструкцию при движении под любым углом. В перемещаемом захвате вакуум отсутствует, позволяя двигаться вдоль поверхности и обеспечивая отслеживание поверхности перед собой с помощью установленного на голени 4 датчика. В момент сигнала с датчика об отсутствии поверхности перемещения захват 7 автоматически фиксируется у края поверхности благодаря заданным размерам кронштейна. После этого снимается вакуум с захвата 6, и узел 9 переводит узел 3 на край поверхности, что гарантируется заданной длиной бедра 2 с учетом диаметра узла 3. Затем узлы 3 и 8 перемещают бедро 1 и голень 5 до срабатывания датчика, фиксирующего наличие новой поверхности под захватом 6. 3 ил.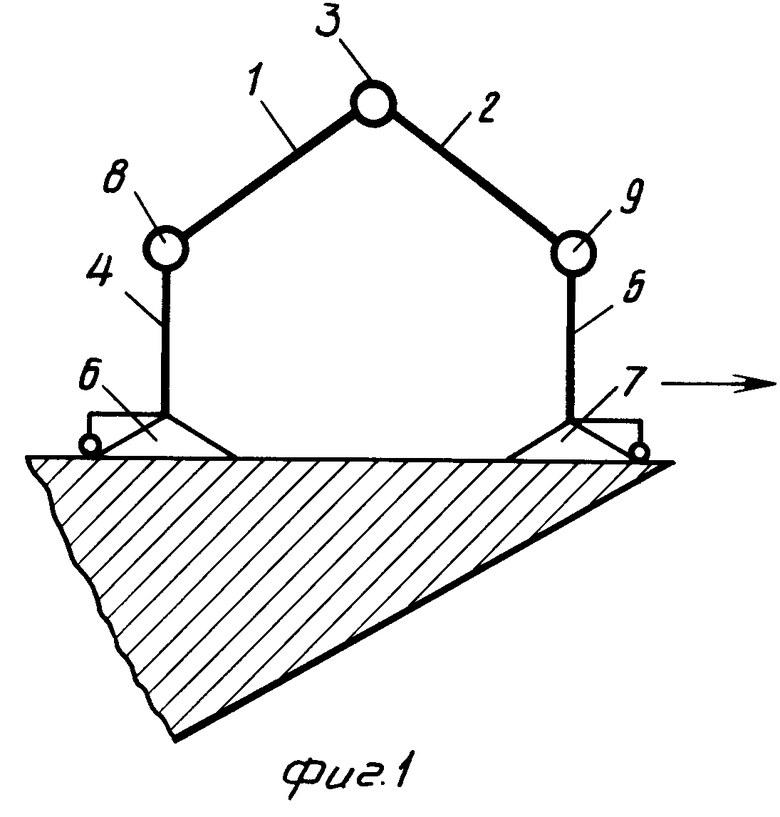
ШАГАЮЩИЙ ТРАНСПОРТНЫЙ МЕХАНИЗМ, содержащий два бедра и две голени, связанные между собой поворотными узлами, причем голени жестко связаны с опорами, отличающийся тем, что он снабжен двумя датчиками определения наличия поверхности перемещения, каждый из которых расположен на торце кронштейна, закрепленного на голенях по ходу движения и под углом к оси транспортного средства, при этом проекция кронштейна на ось транспортного средства равна радиусу опоры, а длина бедер
где A длина голени;
R радиус опоры;
D диаметр поворотного узла между бедрами,
причем опоры выполнены в виде вакуумных захватов, а поворотные узлы в виде моментных цилиндров.
| Патент США N 4265326, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
