Изобретение касается создания шагающих механизмов и может быть использовано для инспектирования вертикальных поверхностей резервуаров и других сооружений.
Известен шагающий механизм транспортного средства, содержащий два двухсторонних пневмоцилиндра, расположенных перпендикулярно один к другому и связанных между собой, при этом на концах штока первого пневмоцилиндра установлены выдвижные опоры с приводами подъема-опускания [1]
Этот шагающий механизм обеспечивает передвижение по сканирующей траектории при определенном положении поворотного узла, однако имеет невысокую надежность и усложненную конструкцию из-за наличия поворотного узла и крепления опор на раздвоенных стержнях.
Цель изобретения повышение надежности при перемещении по сканирующей траектории и упрощение конструкции.
Для этого в шагающем механизме транспортного средства, содержащем два двухсторонних пневмоцилиндра, расположенных перпендикулярно один к другому и связанных между собой, при этом на концах штока первого пневмоцилиндра установлены выдвижные опоры с приводами подъема-опускания, он снабжен дополнительными третьим и четвертым двухсторонними пневмоцилиндрами, установленными соответственно параллельно первому и второму пневмоцилиндрам, на штоках третьего пневмоцилиндра установлены выдвижные опоры с приводами подъема-опускания, корпусы первого и третьего пневмоцилиндров закреплены соответственно с разных сторон одновременно на штоках второго и четвертого пневмоцилиндров, а опорные элементы этих пневмоцилиндров установлены на их корпусах.
Введение дополнительной пары пневмоцилиндров и новое соединение их штоков и вакуумных захватов позволяет оперативно менять траекторию движения платформы транспортного средства под прямым углом, что обеспечивает быстродействие осуществления сканирования платформы вдоль вертикальной поверхности при исключении необходимости использования узла поворота.
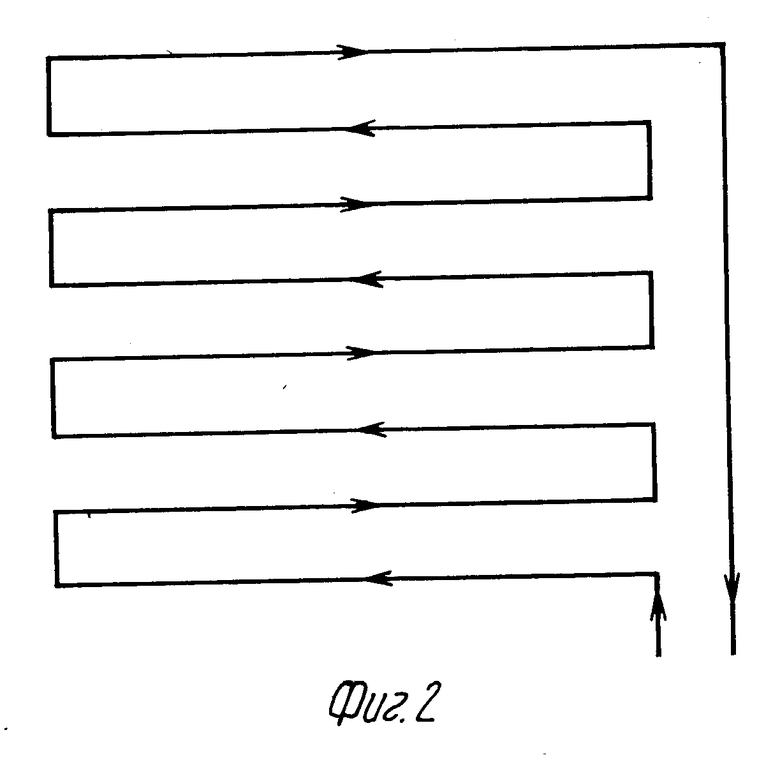
На фиг. 1 представлена схема приводной системы шагающего механизма транспортного средства, вид снизу; на фиг. 2 одна из возможных траекторий сканирования.
Шагающий механизм транспортного средства содержит основные пневмоцилиндры 1 и 8 (фиг. 1), установленные на платформе 3. На штоках 4 и 5 закреплены соответственно выдвижные опоры с вакуумными захватами 6 и 7. Пневмоцилиндры 2 и 9 имеют соответственно штоки 10 и 11, жестко закрепленные на корпусах цилиндров 1 и 2 перпендикулярно к их осям. Выдвижные опоры с вакуумными захватами 12 и 13 жестко установлены соответственно на корпусах пневмоцилиндров 2 и 9. Все захваты имеют привод подъема-опускания.
Шагающий механизм работает следующим образом.
При перемещении платформы 3 вверх задействуются пневмоцилиндры 1 и 8, а пневмоцилиндры 2 и 9 фиксируются в стационарном положении. Платформа 3 перемещается путем синхронного перемещения пневмоцилиндров 1 и 8 при фиксированных захватах 6 и 7 и поднятых захватах 12 и 13. Перемещение штоков 4 и 5 в исходное положение после каждого шага перемещения осуществляется путем опускания и фиксации захватов 12 и 13 и подъема захватов 6 и 7.
Для перемещения платформы 3 в сторону в стационарном положении фиксируются штоки пневмоцилиндров 1 и 8 и задействуются пневмоцилиндры 2 и 9 путем перемещения штоков 10 и 11 относительно неподвижно зафиксированных корпусов пневмоцилиндров 2 и 9 захватами 12 и 13 при поднятых захватах 6 и 7. Возвращение корпусов пневмоцилиндров 2 и 9 в исходное положение осуществляется при зафиксированных на поверхности перемещения захватах 6 и 7 и поднятых захватах 12 и 13. После прохождения горизонтального участка траектории сканирования производится перемещение платформы вверх (фиг. 2) по вышеописанному алгоритму. В общем случае расположение горизонтальных и вертикальных участков сканирования может быть произвольным.
Таким образом достигается высокое быстродействие осуществления сканирующей траектории движения транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1992 |
|
RU2042558C1 |
| СИСТЕМА УПРАВЛЕНИЯ ШАГАЮЩИМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1990 |
|
RU1739607C |
| Шагающий робот для перемещения по произвольно ориентированной в пространстве поверхности | 1989 |
|
SU1782849A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАКЛОННЫМ И ВЕРТИКАЛЬНЫМ ПОВЕРХНОСТЯМ | 2003 |
|
RU2267434C2 |
| Внутритрубное шагающее транспортное средство | 1989 |
|
SU1710430A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1996 |
|
RU2092369C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2435693C1 |
| ШАГАЮЩИЙ ТРАНСПОРТНЫЙ МЕХАНИЗМ | 1996 |
|
RU2092367C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
Использование: касается создания шагающих механизмов и может быть использовано для инспектирования вертикальных поверхностей и резервуаров и других сооружений. Сущность изобретения: платформа 3 перемещается путем синхронного перемещения пневмоцилиндров 1 и 8 при фиксированных захватах 6 и 7 и поднятых захватах 12 и 13. Для перемещения платформы 3 в сторону фиксируются штоки пневмоцилиндров 1 и 8 и задействуются пневмоцилиндры 2 и 9 путем перемещения штоков 10 и 11 относительно неподвижно зафиксированных корпусов пневмоцилиндров 2 и 9 захватами 12 и 13 при поднятых захватах 6 и 7. 2 ил.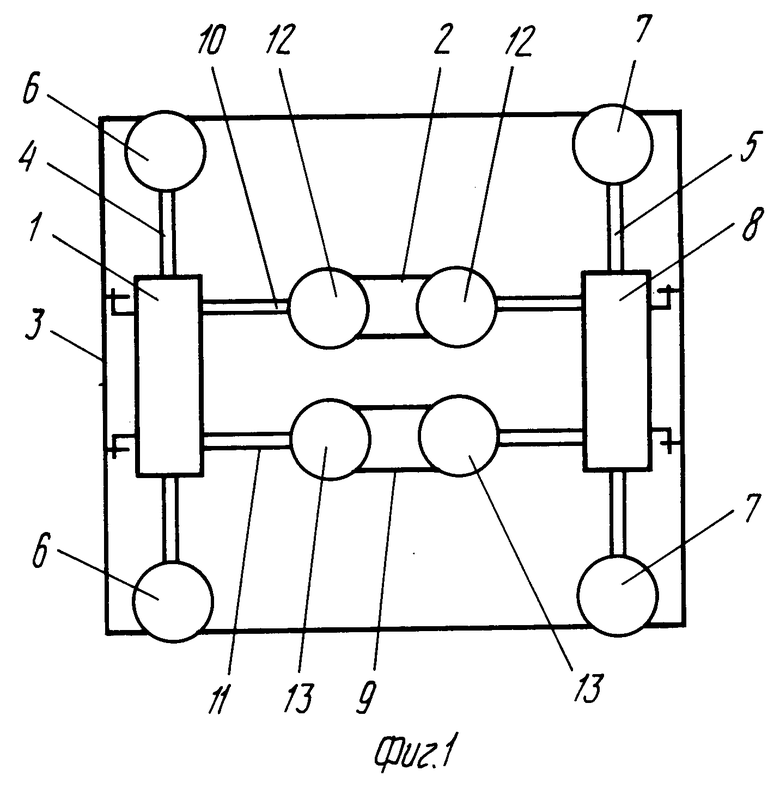
ШАГАЮЩИЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА, содержащий два двусторонних пневмоцилиндра, перпендикулярно расположенных относительно друг друга и связанных между собой, при этом на концах штока первого пневмоцилиндра установлены выдвижные опоры с приводами подъема опускания, отличающийся тем, что он снабжен третьим и четвертым двусторонними пневмоцилиндрами, установленными соответственно параллельно первому и второму пневмоцилиндрам, на штоках третьего пневмоцилиндра установлены выдвижные опоры с приводами подъема опускания, корпуса первого и третьего пневмоцилиндров закреплены соответственно с разных сторон одновременно на штоках второго и четвертого пневмоцилиндров, а опорные элементы этих пневмоцилиндров установлены на их корпусах.
| Патент США N 4790400, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
