Изобретение относится к машиностроению и может быть использовано при автоматизации работ в труднодоступных местах и зонах с повышенной опасностью.
Известен шагающий робот для перемещения по наклонной поверхности, содержащий корпус, вакуумные захваты и средство для перемещения [1] Недостатком известного устройства является то, что оно не может перемещаться по поверхностям, находящимся под углом друг к другу.
Известен шагающий робот для перемещения по произвольно ориентированной в пространстве поверхности, содержащий платформу, снабженную вакуумными захватами и средством перемещения [2] Недостатком известного устройства является невозможность перехода с одной произвольно ориентированной поверхности на другую при их расположении под углом друг к другу.
Наиболее близким к заявляемому по своей технической сущности является известное транспортное средство для перемещения по произвольно ориентированным в пространстве поверхностям. Транспортное средство содержит две связанные между собой подвижным соединением платформы, каждая из которых снабжена вакуумными захватами, а одна из них средством перемещения. Указанное устройство принято за прототип.
Недостатком данного транспортного средства является его малая скорость перемещения и маневренность, а также сравнительно малый диапазон углов между поверхностями, по которым оно может перемещаться.
Техническая задача изобретения состоит в повышении скорости перемещения транспортного средства и его маневренности, а также расширение диапазона углов между произвольно ориентированными поверхностями, по которым может перемещаться транспортное средство.
Указанный результат достигается тем, что транспортное средство для перемещения по произвольно ориентированным в пространстве поверхностям содержит две снабженные вакуумными захватами связанные между собой подвижным соединением платформы, одна из которых снабжена средством перемещения, которое выполнено в виде двух колес, расположенных на одной оси с независимыми приводами, а вакуумные захваты размещены между колесами.
Указанный результат достигается также тем, что связь между платформами выполнена в виде двухзвенного шарнира.
Сущность заявляемого транспортного средства поясняется графическими материалами.
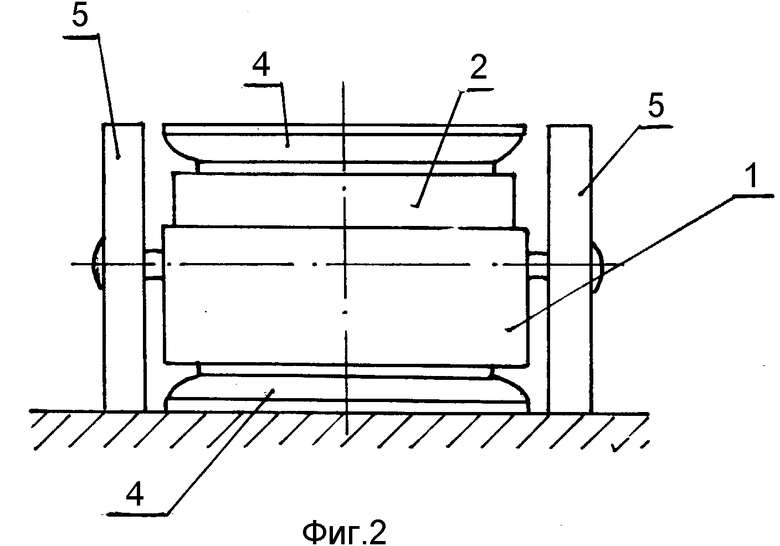
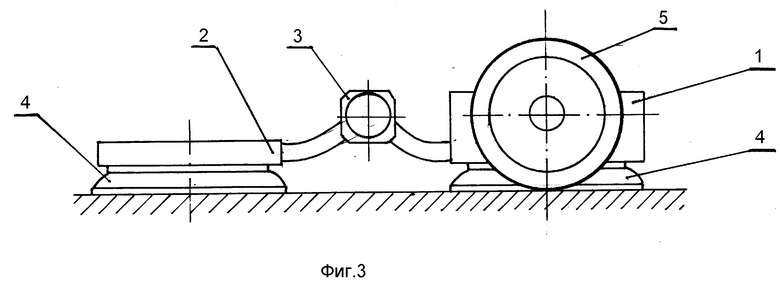
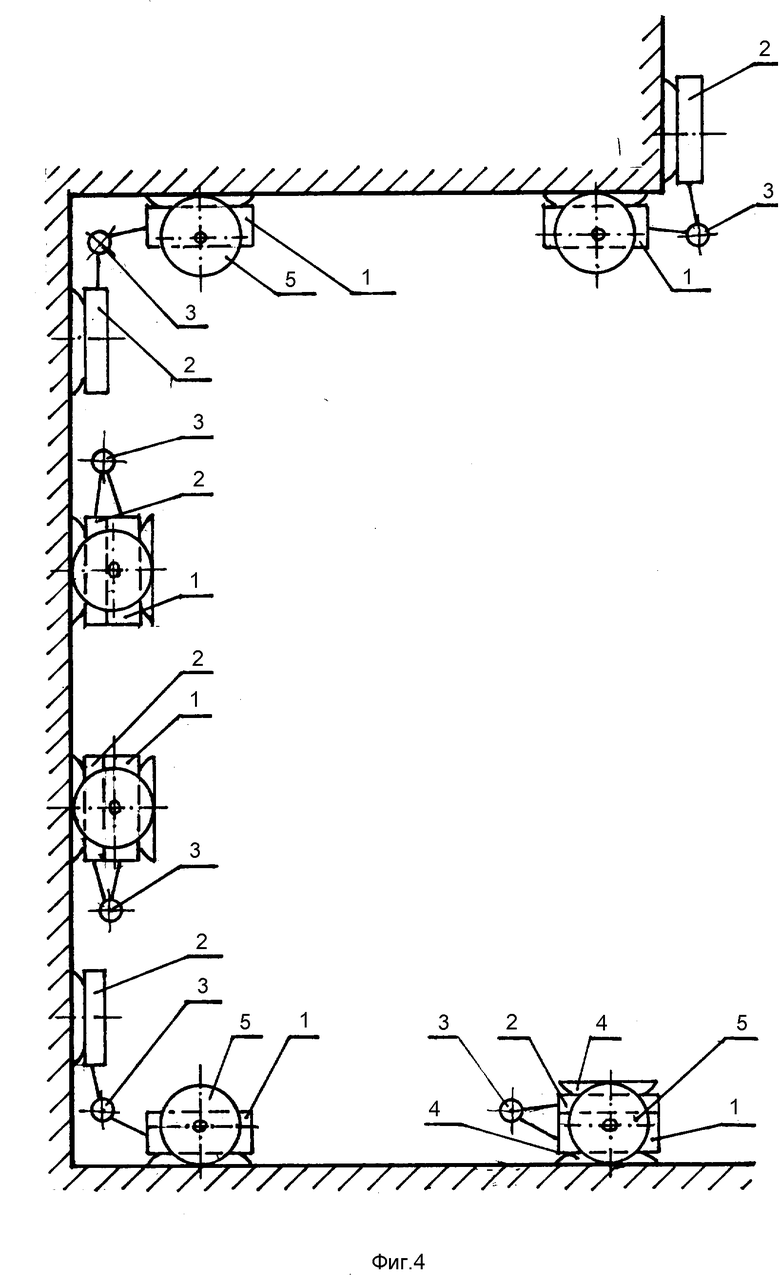
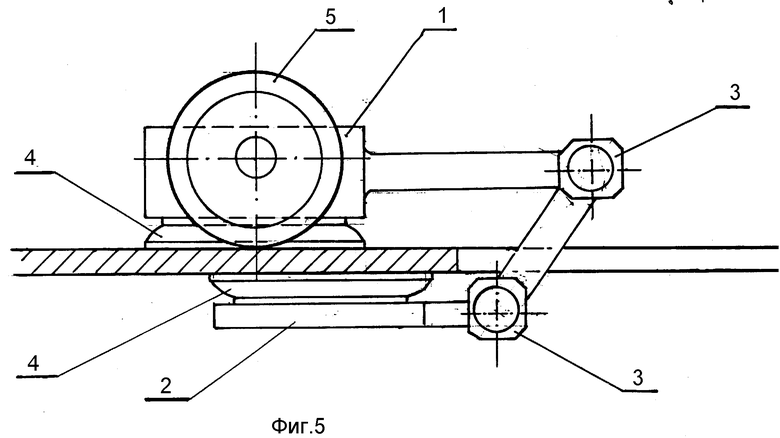
На фиг. 1 представлен схематично главный вид устройства в собранном виде; на фиг. 2 схематично вид сзади устройства; на фиг. 3 схематично главный вид устройства в разложенном виде; на фиг. 4 последовательность положений транспортного средства при переходе с одной поверхности на другую; на фиг. 5
частная реализация устройства с выполнением связи между платформами в виде двузвенного шарнира и порядок перехода транспортного средства с одной поверхности на другую.
Транспортное средство содержит первую основную платформу 1 и вторую дополнительную платформу 2, которые соединены подвижным соединением в виде шарнира 3, снабженным соответствующим приводом из числа известных (не показан). Каждая из платформ снабжена вакуумным захватом 4, соединенным с источником вакуума, также выбранным из числа известных, например вентилятором или вакуумным насосом (не показаны). Основная платформа снабжена двумя колесами 5, установленными на одной оси вращения. Причем материальные оси, на которых закреплены колеса, могут быть выполнены отдельно для каждого из колес или быть общей. Каждое колесо снабжено индивидуальным приводом (не показаны). При этом размер колес выбран таким, чтобы точка контакта беговой дорожки колеса с поверхностью перемещения находилась в одной плоскости с краями эластичной юбки вакуумных захватов независимо от взаимного расположения платформ. Края эластичной юбки вакуумного захвата предпочтительно выполнять из антифрикционного материала.
Предлагаемое транспортное средство при реализации его снабжается некоторыми известными системами, блоками и узлами, которые здесь не рассматриваются в силу их известности и как не имеющие отношения к сущности изобретения.
Устройство функционирует следующим образом. При перемещении по горизонтальным поверхностям (или под небольшими, в несколько градусов, углами к горизонту) транспортное средство находится в "свернутом" состоянии, т. е. платформа 2 расположена на платформе 1 сверху (см. фиг. 1). Вакуумные захваты 4 отключены от источника вакуума и перемещение транспортного средства осуществляется за счет вращения колес 5, приводимых в действие приводами по командам с пульта управления.
Для перехода транспортного средства с одной поверхности на другую с углами от 0o до 90o, например с пола на одну из стен, транспортное средство подходит к стене на определенное расстояние, определяемое габаритами взаимодействующих систем и механизмов (заданное расстояние может контролироваться датчиком расстояния) (см. фиг.4) и по команде с пульта управления или от датчика расстояния включается привод шарнирного соединения 3, которое перемещает платформу 2 до ее соприкосновения вакуумным захватом 4 с вертикальной поверхностью и после соприкосновения включается источник вакуума. После поступления на пульт управления сигнала от вакуумных датчиков о достаточном уровне вакуума в зоне охвата поверхности вакуумным захватом, привод шарнирного соединения 3 переключается в реверсивный режим, платформа 1 перемещается на платформу 2 (см. фиг. 4), колеса 5 беговыми дорожками контактируют уже с вертикальной поверхностью. При подаче управляющего сигнала на привод колес транспортное средство будет перемещаться по вертикальной стене, удерживаясь на ней вакуумным захватом 4.
При подходе к потолку транспортное средство останавливается. Подается команда на одновременное включение индивидуальных приводов колес 5, одно колесо начинает вращаться в одну сторону, другое в противоположную, транспортное средство разворачивается вокруг оси вакуумного захвата 4 на 180o. С помощью датчиков расстояния осуществляется корректировка расстояния транспортного средства до потолка. Включается привод шарнирного соединения 3, платформа 1 разворачивается и касается вакуумным захватом 4 и колесами 5 поверхности потолка, включается источник вакуума вакуумного захвата 4 на платформе 1. После поступления на пульт управления сигнала от вакуумных датчиков о достаточном уровне вакуума в зоне охвата части поверхности потолка подается команда на выключение источника вакуума в вакуумном захвате 4 на платформе 2. Привод шарнирного соединения 3 переключается на реверсивный режим, платформа 2 перемещается на платформу 1 (см. фиг. 4). С помощью колес 5 транспортное средство перемещается по потолку в любом направлении в соответствии с командами.
Аналогичным образом работает система механизмов при перемещении транспортного средства по внешним поверхностям различных строений или при перемещении из внутренних помещений здания наружу, например с потолка через проем в стене на внешнюю часть здания (см. фиг. 4).
На фиг. 3 представлена схема расположения системы механизмов транспортного средства при переходе на поверхность, расположенную по отношению к исходной на 360o (преодоление забора, переход с внешней части здания через окно во внутреннюю, на стену). В рассматриваемом случае связь платформы 2 с платформой 1 выполнена в виде двузвенного шарнира 3-3, каждое из звеньев которого имеет индивидуальный привод.
Таким образом, предлагаемое транспортное средство сочетает в себе простоту конструкции, высокую маневренность, возможность перемещаться с поверхности на поверхность, которые расположены по отношению друг к другу под углами от 0o до 360o, возможность преодолевать трещины, уступы, обеспечивает значительное снижение времени на выполнение того или иного маневра.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 2003 |
|
RU2260543C2 |
| ШАГАЮЩИЙ ТРАНСПОРТНЫЙ МЕХАНИЗМ | 1996 |
|
RU2092367C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1992 |
|
RU2042558C1 |
| ШАГАЮЩИЙ ТРАНСПОРТНЫЙ МЕХАНИЗМ | 1992 |
|
RU2033365C1 |
| ШАГАЮЩИЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2042559C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2098337C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ "ГУСЕНИЦА" | 2003 |
|
RU2262461C2 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2093281C1 |
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |
| СИСТЕМА УПРАВЛЕНИЯ ШАГАЮЩИМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1990 |
|
RU1739607C |
Использование: устройство относится к машиностроению и может быть использовано при автоматизации работ в труднодоступных местах и зонах с повышенной опасностью. Изобретение направлено на повышение скорости перемещения транспортного средства и его маневренности, а также на расширение диапазона углов между произвольно ориентированными поверхностями, по которым может перемещаться транспортное средство. Сущность: транспортное средство содержит две снабженные вакуумными захватами связанные между собой подвижным соединением платформы, одна из которых снабжена средством перемещения, при этом средство перемещения выполнено в виде двух расположенных на одной оси вращения колес с независимыми приводами, а вакуумные захваты размещены между колесами. Кроме того, связь между платформами может быть выполнена в виде двузвенного шарнира. 1 з.п. ф-лы, 5 ил.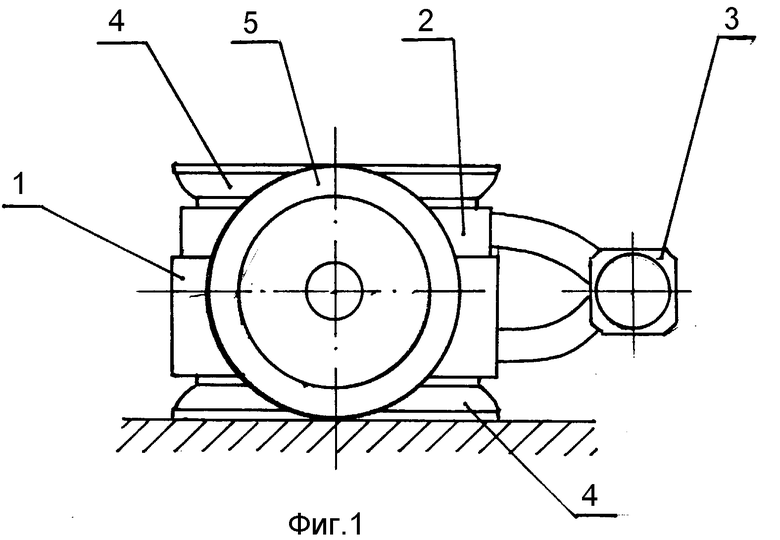
| R, патент, 2042558, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |

