Изобретение относится к машиностроению и может быть использовано для проведения работ на сооружениях с произвольно ориентированными поверхностями и конструктивными элементами.
Известно транспортное средство, содержащее корпус с приводами, связанными с захватами ( патент США N 3682265, кл. B 62 D 55/00, 1972). Недостатком известного устройства является невозможность его перехода с одной поверхности на другую.
Известно транспортное средство, содержащее два бедра и две голени, связанные между собой поворотными узлами, причем голени жестко связаны между собой (патент США N 4265326, кл. B 62 D 57/02, 1981). Недостатком известного устройства является его малая маневренность.
Наиболее близким к заявляемому является известный шагающий транспортный механизм, содержащий два бедра, связанные между собой поворотными узлами в виде моментных цилиндров, две голени, снабженные захватами и соединенные с бедрами с помощью поворотных узлов.
Недостатком известного устройства является недостаточно высокая маневренность, что не позволяет ему перемещаться по сооружениям с произвольно ориентированными конструктивными элементами, например, такими как мачты высоковольтных линий. Это обусловлено в первую очередь тем, что, поскольку узлы поворота выполнены в виде моментных цилиндров, то перемещение бедер и голеней происходит в одной плоскости, а кроме того, голени соединены с захватами жестко.
Техническая задача данного изобретения состоит в увеличении числа возможных относительных перемещений элементов шагающего транспортного средства.
Технический результат, достигаемый настоящим изобретением, состоит в повышении маневренности транспортного средства.
Указанный результат достигается тем, что шагающий транспортный механизм содержит две голени с захватами и два бедра, связанные между собой поворотными узлами, при этом голени соединены с захватами с помощью шарниров и оси вращения поворотных узлов бедро-бедро параллельны опорной поверхности, а бедро-голень перпендикулярны опорной поверхности.
За счет соединения голени с захватом с помощью шарнира и выполнения поворотных узлов с взаимно перпендикулярными осями вращения, элементы шагающего механизма /бедро-голень-захват получают возможность перемещения относительно друг друга в трех плоскостях, а не в одной как в прототипе, что существенно повышает его маневренность и позволяет перемещаться не только по произвольно ориентированным поверхностям, но и по произвольно ориентированным конструктивным элементам объемных сооружений.
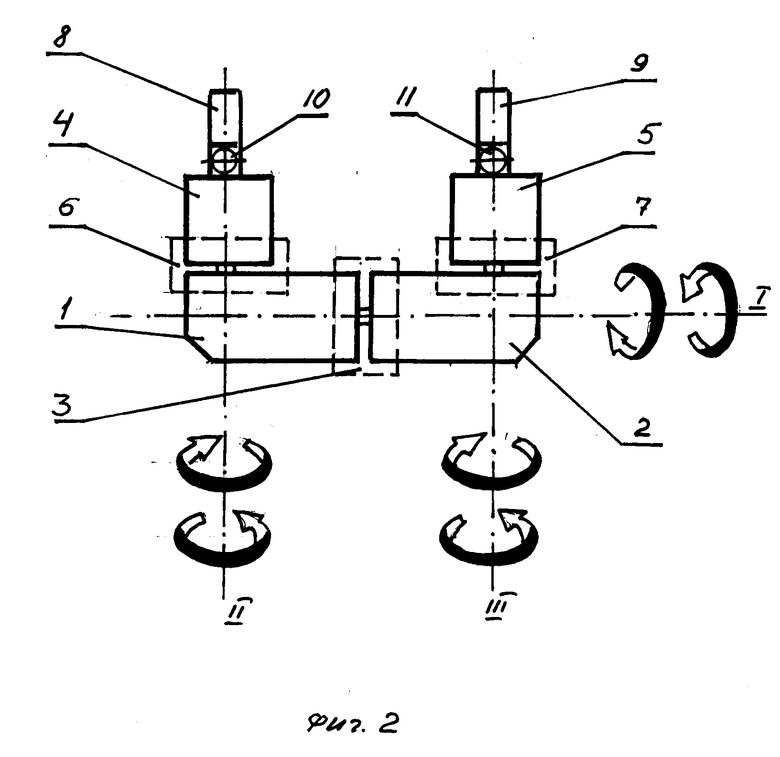
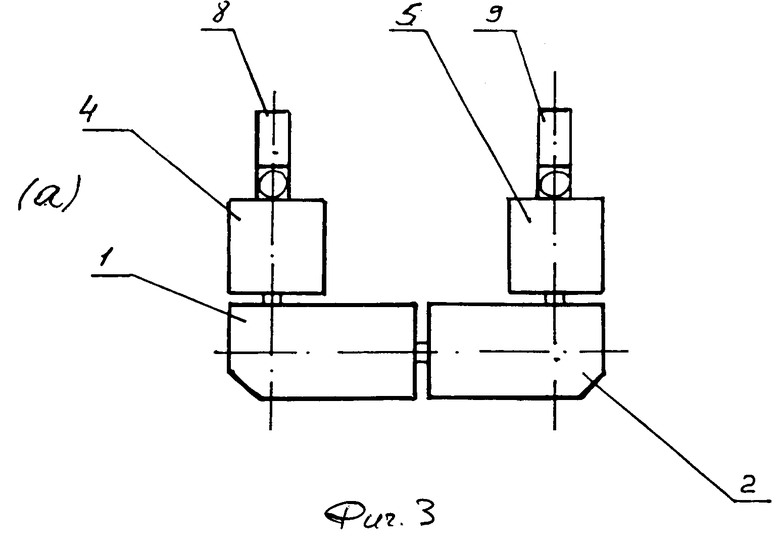
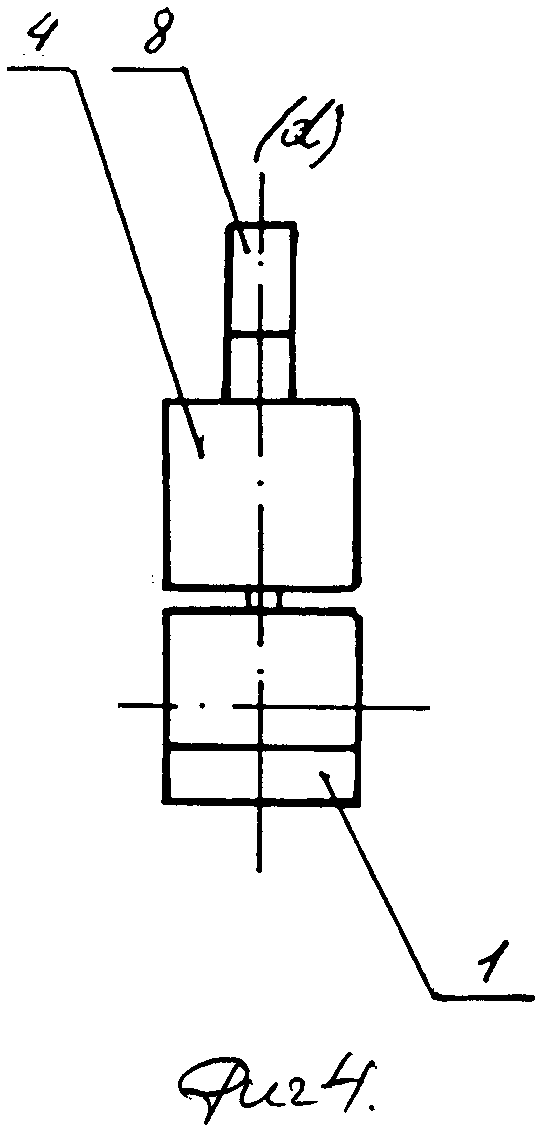
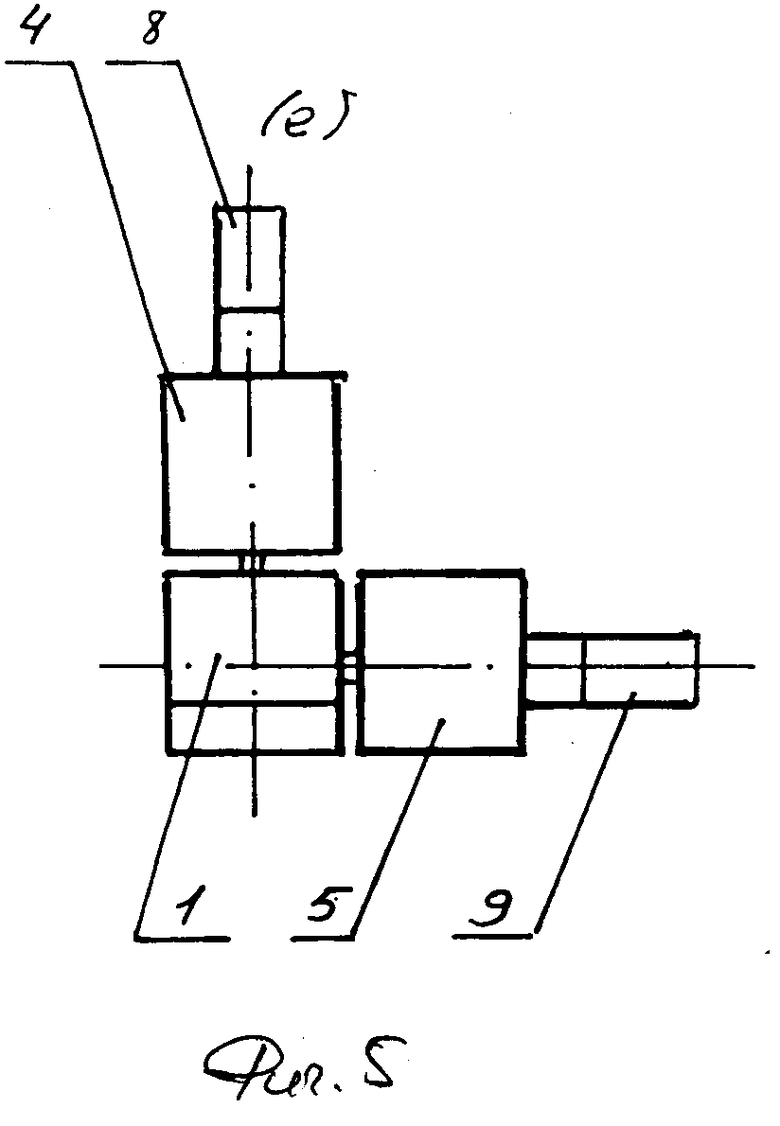
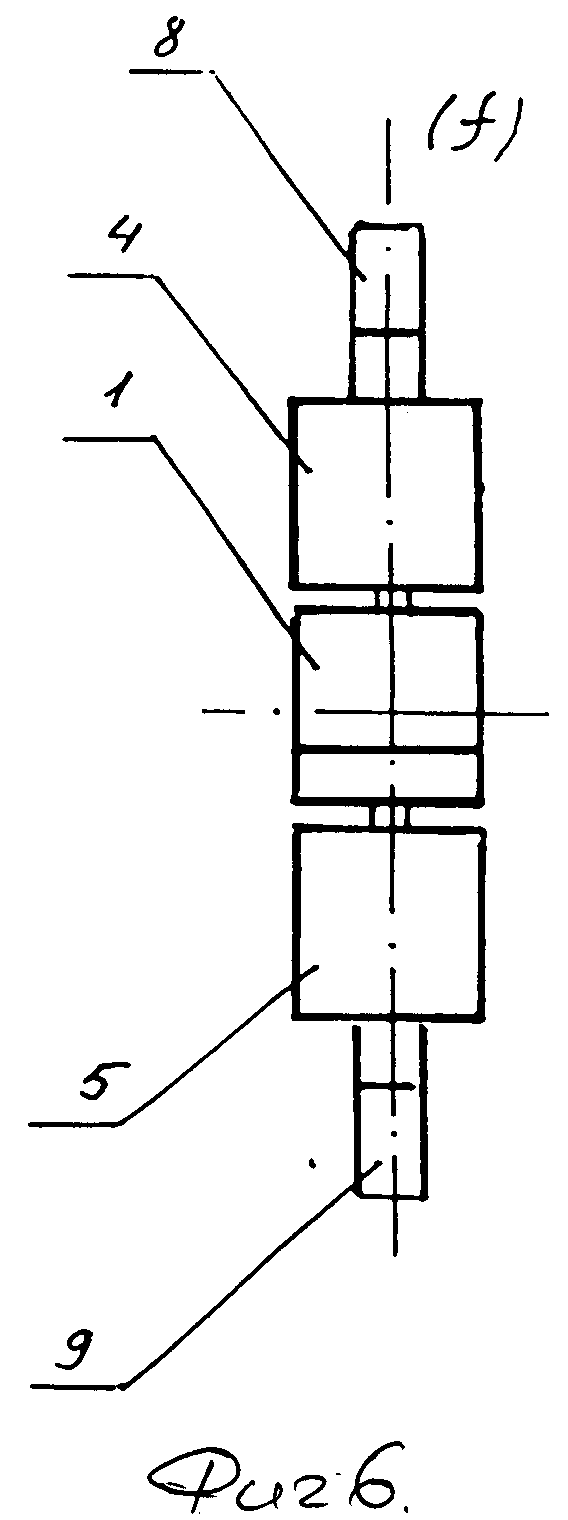
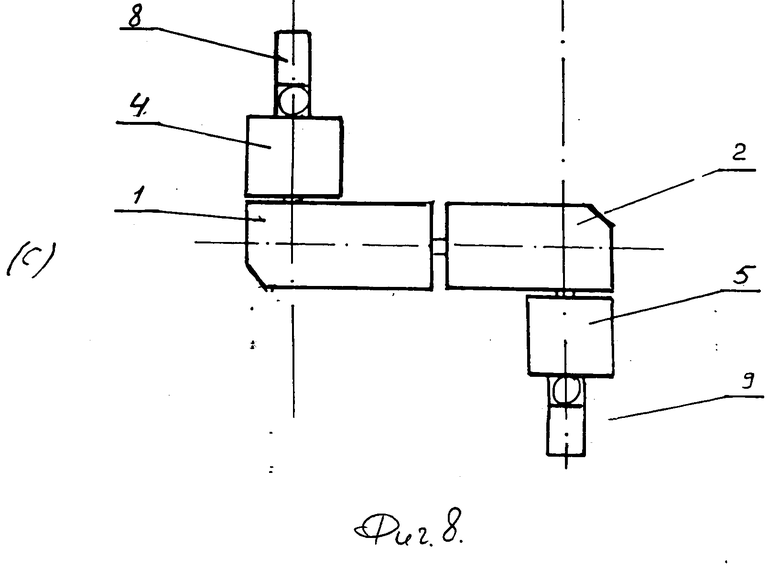
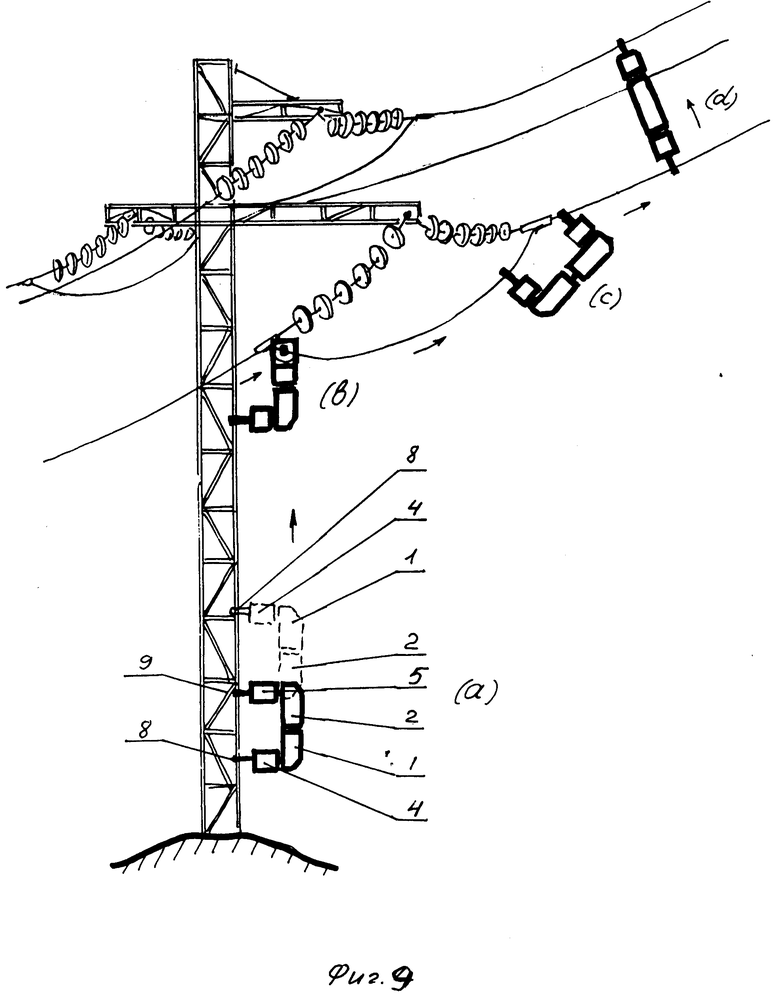
На фиг. 1 показана принципиальная кинематическая схема заявленного шагающего транспортного механизма; на фиг. 2 возможная реализация устройства в общем виде; на фиг. 3 вид сбоку устройства; на фиг. 4 вид спереди устройства; на фиг. 5 вид спереди устройства, бедра которого развернуты на 90o; на фиг. 6 вид спереди устройства, бедра которого развернуты на 180o; на фиг. 7 вид сверху устройства; на фиг. 8 вид сверху устройства, бедра которого развернуты на 180o; на фиг. 9 схематично последовательность перемещения транспортного механизма по различным конструктивным элементам высоковольтной линии передач.
Устройство содержит бедра 1 и 2, соединенные между собой поворотным узлом 3 с осью вращения 1. Каждое из бедер соединено с одной из голеней 4 и 5 через поворотные узлы 6 и 7, оси вращения которых II и III перпендикулярны оси вращения 1 узла 3. Каждая голень снабжена захватами 8 и 9, которые соединены с голенями с помощью шарниров 10 и 11, обеспечивающими поворот захватов вокруг осей IV и V (перпендикулярны плоскости рисунка на фиг. 1). Захваты могут быть выполнены сменными и устанавливаться в зависимости от назначения транспортного механизма и сооружения, на котором он будет использован. Это могут быть вакуумные присоски, электромагнитные захваты, схваты в виде сводимых и разводимых губок или клешней, снабженных соответствующими приводами.
Устройство работает следующим образом. При перемещении по поверхности захваты 8 и 9 с помощью поворотных узлов 3,6,7 поочередно перемещаются в направлении движения.
Для перемещения шагающего транспортного механизма с поверхности на поверхность или с поверхности на сооружение или с одного конструктивного элемента на другой на сооружениях типа мачт высоковольтных линий передач, по команде оператора (или в автоматическом режиме на основе поступающей на пульт управления телеметрической информации) один из захватов, например 8, освобождается от контакта с поверхностью или конструктивным элементом и за счет поворотных узлов, например, 3,7, и шарниров 10,11 вводится в контакт с выбранной точкой на предполагаемом маршруте движения. После фиксации захвата 8 освобождается захват 9, который за счет поворотов узлов 3,6 и шарниров 10,11 перемещается в другую выбранную точку на поверхности или на конструкции и фиксируется.
Далее алгоритм повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ ТРАНСПОРТНЫЙ МЕХАНИЗМ | 1992 |
|
RU2033365C1 |
| ШАГАЮЩИЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2042559C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1996 |
|
RU2092369C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1992 |
|
RU2042558C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2098337C1 |
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |
| ОРТОПЕДИЧЕСКИЙ АППАРАТ | 1997 |
|
RU2119310C1 |
| Шагающее транспортное средство | 1975 |
|
SU734055A1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2093282C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2093281C1 |

Использование: устройство относится к машиностроению и может быть использовано для проведения работ на сооружениях с произвольно ориентированными поверхностями и конструктивными элементами. Сущность: шагающий транспортный механизм содержит две голени с захватами и два бедра, связанные между собой поворотными узлами, при этом голени соединены с захватами с помощью шарниров, и оси вращения поворотных узлов бедро-бедро параллельны опорной поверхности, а бедро-голень перпендикулярны опорной поверхности. 9 ил.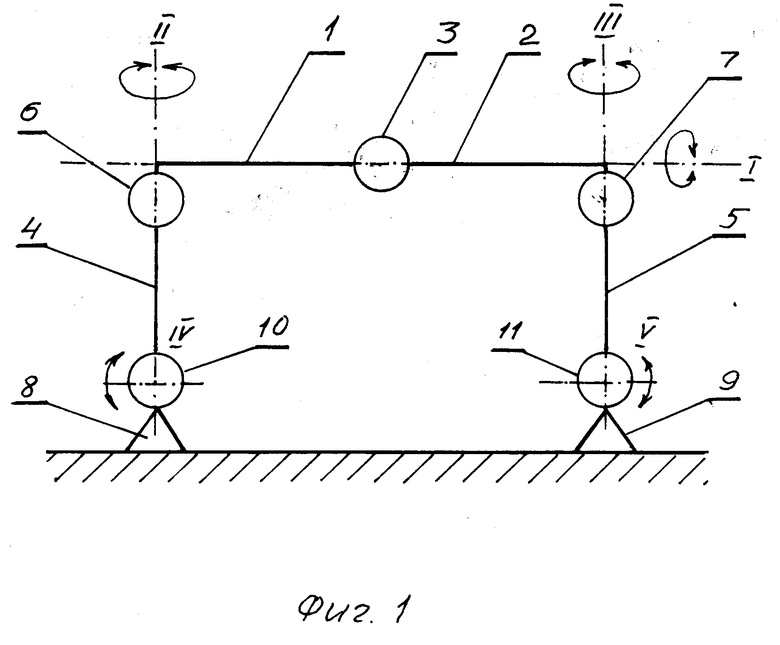
Шагающий транспортный механизм, содержащий два бедра, связанные между собой поворотным узлом, и две голени с захватами, соединенные с бедрами поворотными узлами, отличающийся тем, что голени соединены с захватами с помощью шарниров, ось вращения поворотного узла бедро бедро параллельно опорной поверхности, а оси вращения поворотных узлов бедро голень перпендикулярны опорной поверхности.
| RU, патент, 2033365, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |

