Изобретение относится к медицине и может быть использовано для обеспечения естественности передвижения человека с нарушением иннервации нижней части тела или ног.
Известен ортопедический аппарат, выполненный в виде протеза бедра, содержащий гильзу бедра, соединенную с ним через шарнир голень со стопой, а также системы привода и управления (см. описание к а.с. СССР N 1357019, A 61 F 2/60, 1987). Недостатком известного устройства является сложность его конструкции и невозможность использования человеком с нарушением иннервации нижней части тела.
Известен ортопедический аппарат, выполненный в виде протеза бедра, содержащий бедренное звено в виде гильзы, и голень с коленным механизмом, снабженным опорной площадкой и направляющей, на которой расположен прикрепленный к голени ползун, соединенный шарнирно с нижней частью опорной площадки (см. описание к патенту РФ N 2008854, A 61 F 2/60, 1994). Недостатком известного аппарата является невозможность использования человеком с иннервацией нижней части тела, а также малая функциональность, заключающаяся в невозможности перемещения по лестницам и посадку-вставание со стула.
Наиболее близким к заявляемому по своей технической сущности и достигаемому результату является ортопедический аппарат, содержащий бедренное и голенное звенья, соединенные между собой шарниром и дополнительным звеном, один конец которого шарнирно соединен с отростком на голени, а другой шарнирно соединен со снабженным приводом ползуном, размещенным с возможностью перемещения в пазу, выполненном в бедренном звене (см. статью Ruthenberg et al. Powered gait ortosis. Journal of Rehabilitation Research and Development. vol. 34, N 2 1997, p. 212, fig. A-4/31/).
Недостатком известного аппарата является ограниченность выполняемых функций, так как он позволяет обеспечить только перемещение по ровной поверхности и не дает возможности ходьбы по лестнице и посадки на стул или вставания со стула. Это обусловлено тем, что известный аппарат имеет всего одну программу управления, реализуемую конструкцией единого приводного узла "голень-бедро". На звене 1 установлены в осях два звена - звено 2 (с шестеренкой 2 и электроприводом) и звено 8. На оси звена 8 жестко закреплена шестеренка 3 и свободно вращается звено 4, которое шарниром связано со звеном 3: противоположный конец звена 3 шарнирно связан с шестеренкой 2, что обеспечивает при вращении шестеренки 2 качание бедра на заданный программой угол, необходимый для реализации шага (при ходьбе) установленной длины; в бедре в пазу расположен ползун (звено 5), который с нижней стороны шарнирно связан со звеном 7, а звено 7 шарнирно связано с голенью (звено 8), а в верхней части ползун имеет штырек, входящий в фигурный паз заданной конфигурации (замкнутый), выполненный на поверхности шестеренки 3; штырек, следуя по этому фигурному замкнутому пазу, по заданной программе с помощью ползуна, отклоняет голень (звено 8) в коленном суставе в ту или другую стороны, обеспечивая шаг человека заданной длины.
Таким образом, указанный ортопедический аппарат предназначен лишь для выполнения функции ходьбы с шагом установленной длины.
Заявляемое изобретение направлено на расширение функций выполняемых ортопедическим аппаратом, а именно на обеспечение возможности перемещения по лестницам, посадки на стул и вставания со стула.
Указанный результат достигается тем, что ортопедический аппарат содержит бедренное и голенное звенья, соединенные между собой шарниром и дополнительным звеном, один конец которого шарнирно соединен с отростком на голени, а другой шарнирно соединен со снабженным приводом ползуном, размещенным с возможностью перемещения в пазу, выполненном в бедренном звене, при этом привод ползуна выполнен в виде соединенной с ним зубчатой рейки и взаимодействующего с ней зубчатого колеса, снабженного двигателем, жестко закрепленным на бедренном звене.
Отличительными признаками заявляемого ортопедического аппарата являются:
выполнение привода ползуна в виде соединенной с ним зубчатой рейки и взаимодействующего с ней зубчатого колеса, снабженного двигателем;
жесткое закрепление двигателя с зубчатым колесом на бедренном звене.
Выполнение ползуна с зубчатой рейкой и зубчатым зацеплением, преобразующим вращательное движение ротора двигателя в поступательное движение ползуна вдоль бедренного звена и жесткое закрепление двигателя на бедренном звене позволяет с помощью связующего звена устанавливать любой угол между бедренным и голеневым звеньями на уровне коленного сустава и в паре с тазобедренным механизмом ортопедического аппарата реализовывать все заданные функции движения ног человека.
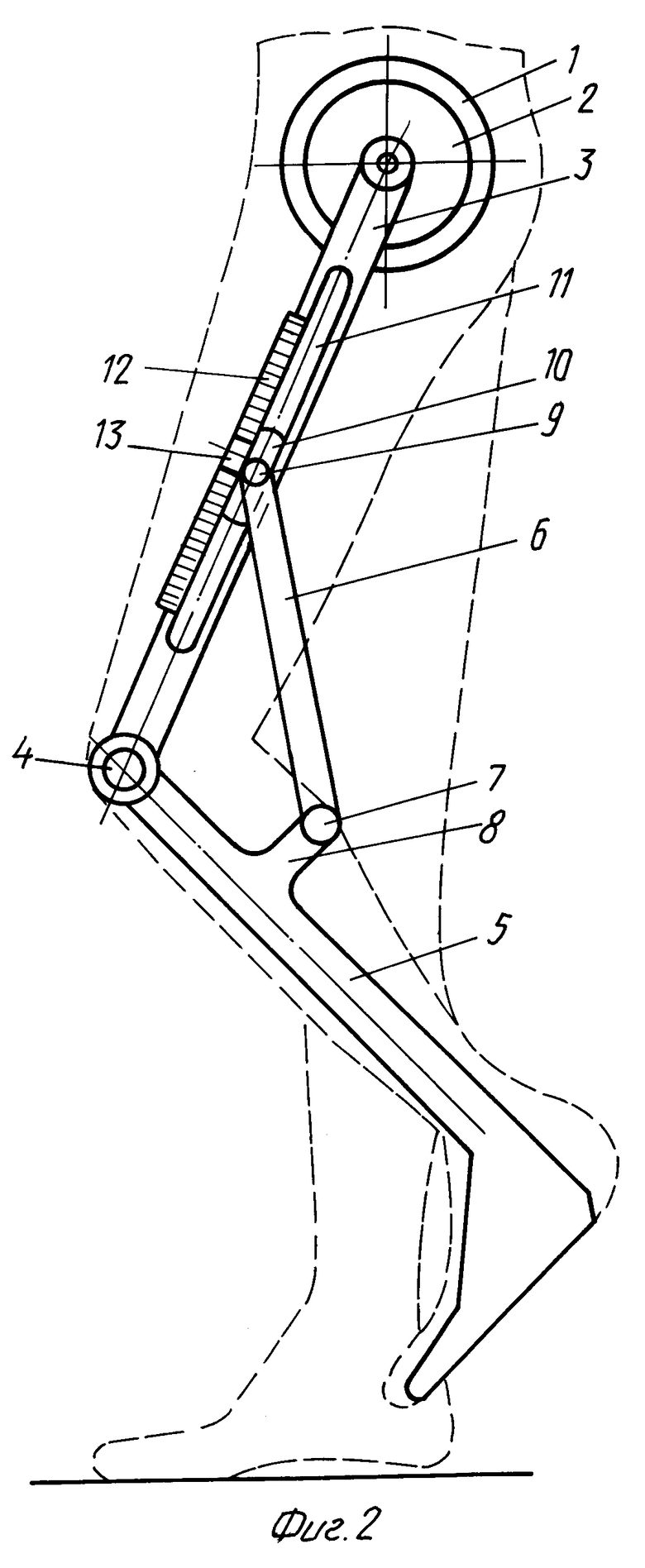
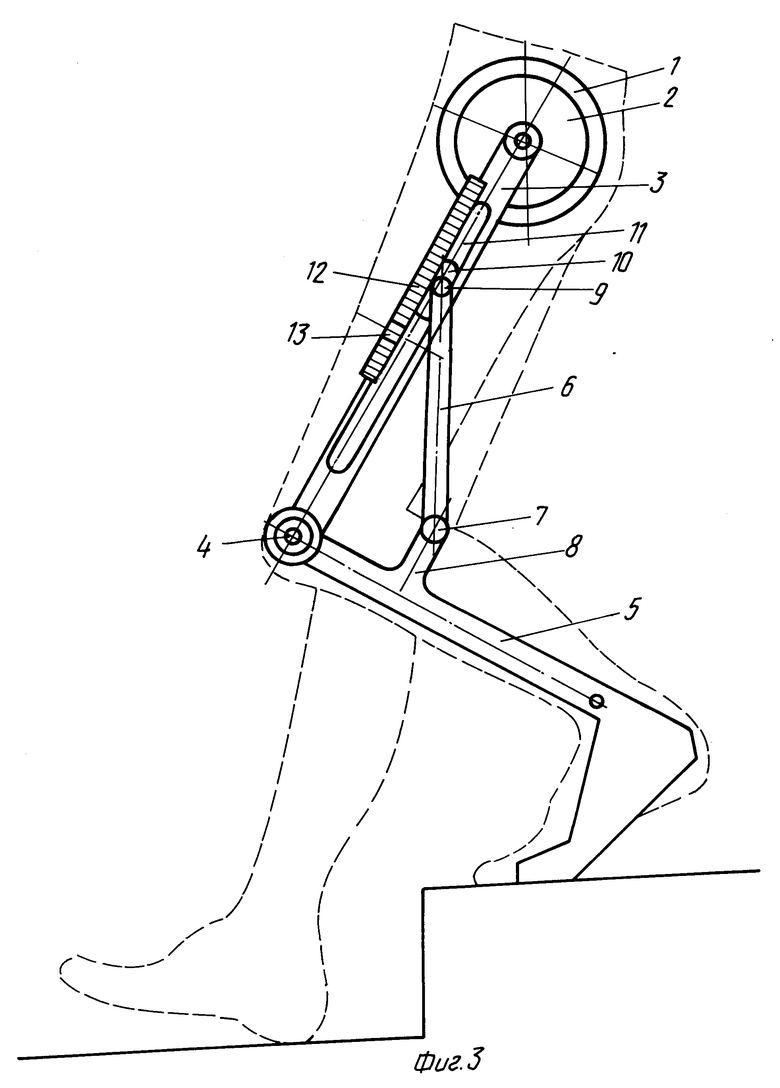
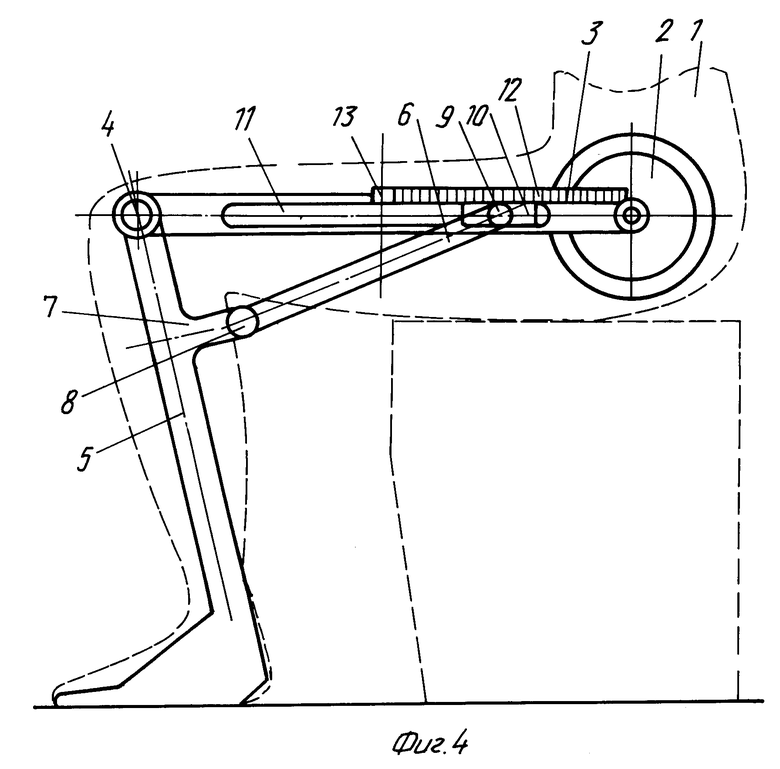
Сущность заявляемого изобретения поясняется графическими изображениями. На фиг. 1 схематично представлена кинематическая схема ортопедического аппарата при положении человека стоя; на фиг. 2 показана кинематическая схема аппарата при осуществлении шага человека; на фиг. 3 показана схема аппарата в момент перемещения человека по лестнице; на фиг. 4 - при положении сидя.
Ортопедический аппарат состоит из тазобедренного механизма 1, закрепленного на тазобедренном корсете. Тазобедренный механизм состоит, например, из плоского электродвигателя (на чертеже не показан), статор которого жестко закреплен на тазобедренном корсете, а ротор через редуктор соединен с диском 2 ("тазобедренным суставом" ортопедического аппарата), с которым жестко связано бедренное звено 3 ортопедического аппарата, причем оси вращения двигателя диска совпадают с естественной осью вращения тазобедренного сустава человека. На уровне коленного сустава человека бедренное звено ортопедического аппарата с помощью плоского шарнира 4 подвижно связано с голенным звеном 5 ортопедического аппарата, образуя "коленный сустав" ортопедического аппарата. Кроме шарнира 4 бедренное звено связано с голенным звеном дополнительным звеном 6, один конец которого с помощью шарнира 7 связан с отростком 8 на голени, а другой шарниром 9 связан с бедренным звеном. Причем шарнир 9 размещен на ползуне 10, который имеет возможность в пазу 11 перемещаться вдоль бедренного звена. Ползун имеет зубчатую рейку 12, с которой в зацеплении находится зубчатое колесо 13, приводимое во вращение с помощью редуктора и электродвигателя 14, жестко закрепленных на бедренном звене 3.
Предлагаемый ортопедический аппарат может быть оснащен различными известными системами управления. Система управления должна обеспечивать возможность аппарата работать в различных режимах, необходимых для относительно нормального функционирования ног человека, например с нарушением иннервации нижней части тела, ног - ходьба с заданной величиной шага и скоростью, передвижение по ступенькам лестницы вверх-вниз, посадка и вставание со стула (для поддержания равновесия естественно необходимо при различных движения пользоваться третьей точкой опоры, например тростью-палочкой), т.е. обеспечивать высокую согласованность работы двух электродвигателей по установленным программам движения. Программы движения закладываются в систему управления, которая может быть размещена в верхней части тазобедренного корсета.
Ортопедический аппарат работает следующим образом. В положении стоя на месте, т.е. в стартовом положении, перед началом ходьбы, подъема или спуска с лестницы, посадки на стул, ползун 10 упирается в нижнюю часть паза 11, обеспечивая защиту коленного сустава человека от возможного противоестественного разгибания, т.е. выдерживая между бедренным 3 и голенным 5 звеньями заданный угол безопасности 3-5o. Для того чтобы сделать шаг вперед, в соответствии с заданной программой, заложенной в систему управления, одновременно начинают работать два электродвигателя - электродвигатель тазобедренного механизма и электродвигатель 14, обеспечивающий поступательное движение ползуна в пазу 11 бедренного звена 3. В результате бедренное звено 3 начинает вращаться относительно тазобедренного механизма 1 вместе с диском 2 (например, по часовой стрелке, как показано на фиг. 2), а ползун 10 за счет взаимодействия зубчатого колеса 13 с зубчатой рейкой 12, перемещаясь в пазу 11 вверх, увлекает за собой с помощью звена 6 голенное звено 5, которое поднимается вверх, поворачиваясь относительно шарнира 4, в результате чего осуществляется сгиб ноги человека, на котором одет ортопедический аппарат, в коленном суставе. За счет поочередного сгибания-разгибания коленных суставов правой и левой ноги человека в соответствии с программой системы управления осуществляется его перемещение - ходьба, подъем по лестнице и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| ОРТЕЗ | 1994 |
|
RU2092136C1 |
| Способ изготовления ортопедического аппарата нижней конечности для больных с последствиями параличей нижних конечностей | 2021 |
|
RU2807146C2 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| АППАРАТ ДЛЯ ПОМОЩИ ПРИ ХОДЬБЕ | 2013 |
|
RU2555801C2 |
| СПОСОБ РЕАЛИЗАЦИИ ЗАДНЕГО ТОЛЧКА ПРИ ОСЛАБЛЕНИИ МЫШЦ ДИСТАЛЬНОЙ ЧАСТИ НИЖНЕЙ КОНЕЧНОСТИ И ОРТОПЕДИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2092134C1 |
| Способ подбора протезно-ортопедического изделия для пациентов с поражением нижней конечности и ортопедический аппарат для его осуществления | 1990 |
|
SU1745235A1 |
| Аппарат ортопедический на всю ногу | 2018 |
|
RU2708841C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
Ортопедический аппарат относится к медицине и может быть использован для обеспечения естественности передвижения человека с нарушением иннервации нижней части тела или ног. Изобретение направлено на расширение функций, выполняемых ортопедическим аппаратом, а именно на обеспечение возможности перемещения по лестницам, посадки на стул и вставания со стула. Ортопедический аппарат содержит бедренное и голенное звенья, соединенные между собой шарниром и дополнительным звеном, один конец которого шарнирно соединен с отростком на голени, а другой шарнирно соединен со снабженным приводом ползуном, размещенным с возможностью перемещения в пазу, выполненном в бедренном звене, при этом привод ползуна выполнен в виде соединенной с ним зубчатой рейкой и взаимодействующего с ней зубчатого колеса, снабженного двигателем, жестко закрепленным на бедренном звене. Технический результат заключается в расширении функций, выполняемых аппаратом, а именно в обеспечении возможности перемещения по лестницам, посадки на стул и вставания со стула. 4 ил.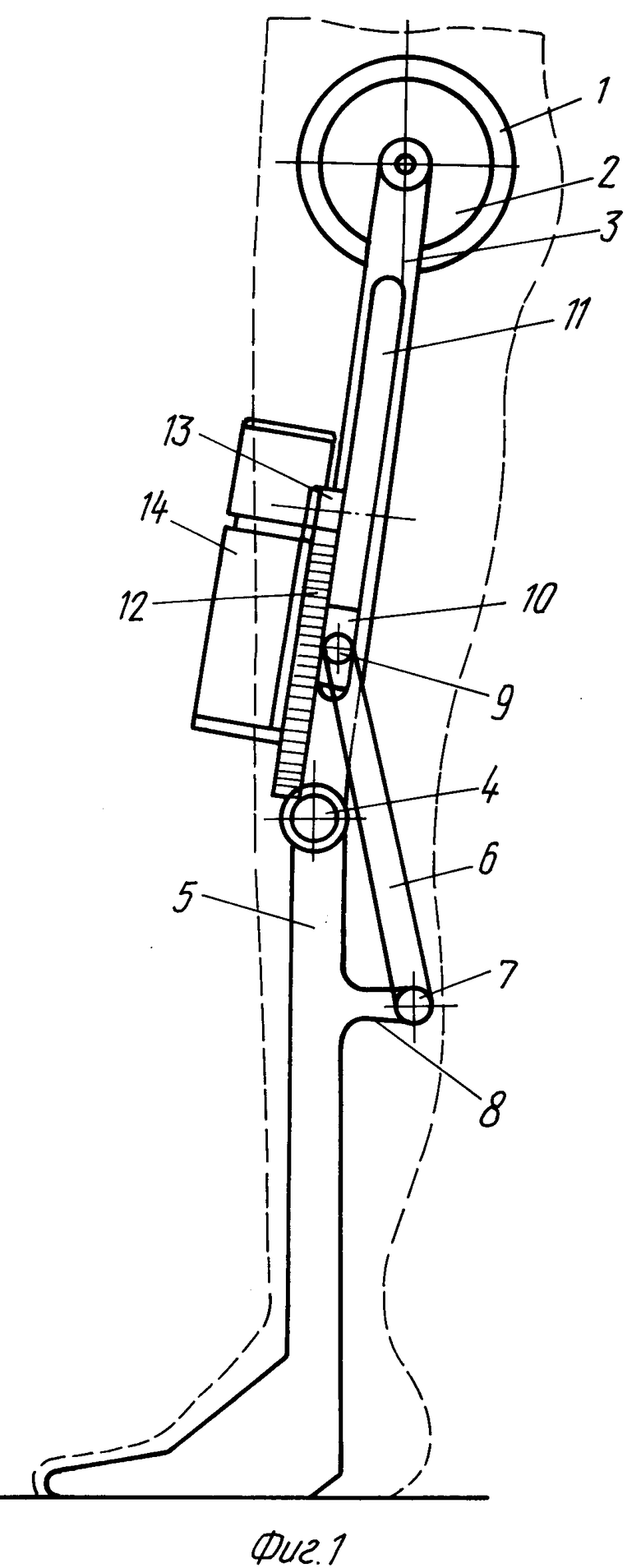
Ортопедический аппарат, содержащий бедренное и голенное звенья, соединенные между собой шарниром и дополнительным звеном, один конец которого шарнирно соединен с отростком на голени, а другой шарнирно соединен со снабженным приводом ползуном, размещенным с возможностью перемещения в пазу, выполненном в бедренном звене, отличающийся тем, что привод ползуна выполнен в виде соединенной с ним зубчатой рейки и взаимодействующего с ней зубчатого колеса, снабженного двигателем, жестко закрепленным на бедренном звене.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ruthenberg etal Powered gait ortosis | |||
| Journal of Rehabilitation Research and Development, vol.34, N 2 1997 p.212, fig | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРОТЕЗ БЕДРА | 1991 |
|
RU2008854C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Протез бедра с управляемым коленным шарниром | 1985 |
|
SU1357019A1 |
