Изобретение относится к области радиотехники и может использоваться в наземных системах активной обзорной однопозиционной радиолокации для обнаружения и высокоточного определения местоположения, параметров движения и траекторий перемещающихся в пространстве воздушных целей (ВЦ).
В настоящее время основным источником информации о перемещении ВЦ являются радиолокационные системы (РЛС), позволяющие решать задачи обнаружения, определения местоположения и измерения параметров траекторий ВЦ, а также распознавания их типов. Это обусловлено необходимостью контроля окружающего пространства в условиях усложнения способов действий воздушных целей, например, самолетов. Так как современные ВЦ могут перемещаться по сложным траекториям с высокими (в том числе гиперзвуковыми) скоростями, то при решении упомянутых задач должна быть обеспечена необходимая для принятия решений достоверность полученной в процессе работы РЛС информации при работе в реальном масштабе времени, определяемом быстродействием РЛС.
Наиболее распространенным в настоящее время типом РЛС являются активные однопозиционные системы, измеряющие дальности и угловые координаты (УК) целей, то есть РЛС дальномерно-угломерного типа. Необходимые точность измерения дальности и разрешающая способность по дальности в этих РЛС обеспечиваются путем использования широкополосных зондирующих сигналов с внутриимпульсной угловой модуляцией и сжатием импульсов при приеме. Наиболее высокая точность угловых измерений в таких РЛС обеспечивается, как известно, моноимпульсным методом [1 - Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация - М.: Радио и связь, 1984. - 312 с.]. При этом быстродействие достигается использованием обзорных режимов работы, позволяющих одновременно определять координаты ВЦ из состава группы, находящихся в общей зоне парциальных диаграмм направленности (ДН), при их разрешении по дальности.
В типовых обзорных РЛС стробы сопровождения по дальности и углам существенно различаются - размер строба по дальности намного меньше размера строба по УК, что отмечено в [2 - патент 2480782, РФ. Способ и устройство разрешения движущихся целей по угловым направлениям в обзорных РЛС /Ирхин В.И., Замятина И.Н. Заявл. 6.10.2011, опубл. 27.04.2013]. Для обеспечения же удовлетворительных характеристик РЛС разрешение по угловым координатам (в линейном измерении) должно быть близким к разрешению по дальности. Здесь уменьшение размера строба, формируемого вокруг первичной отметки цели, достигается за счет повышения точности измерений, что позволяет повысить достоверность определения принадлежности отметки ВЦ к той или иной траектории и снижает вероятность визуального перепутывания траекторий близко расположенных целей.
Аналогом предложенного способа можно считать способ [3 - патент 2583849, РФ, G01S 3/14, H01Q 25/02. Способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки (варианты) и обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов / Джиоев А.Л., Омельчук И.С., Фоминченко Г.Л., Фоминченко Г.Г., Яковленко В.В. Заявл. 13.04.2015, опубл. 10.05.2016], в котором решена задача повышения точности измерения УК при расширении рабочей зоны и повышении скорости измерений для однопозиционной обзорной пеленгации. Этот способ и пеленгатор на его основе позволяют путем выбора угла разноса парциальных ДН и вида весовой функции (ВФ) сформировать пеленгационную характеристику (ПХ) устройства, практически линейную в рабочей зоне, равной раствору моноимпульсной группы лучей (МГЛ) по уровню половинной мощности, и обеспечить моноимпульсное измерение УК с точностью не хуже 0,01 от величины этой зоны.
Однако в аналоге [3] не определяются местоположение целей и параметры их траекторий.
Расширение рабочей зоны может быть также достигнуто при формировании кубической ПХ [4 - Джиоев А.Л., Омельчук И.С., Фоминченко Г.Л., Яковленко В.В. Способ обработки сигналов, алгоритмы работы и структура измерителя угловых координат с кубической пеленгационной характеристикой в обзорной цифровой моноимпульсной радиолокационной системе. Журнал радиоэлектроники [электронный журнал]. 2017. №7. Режим доступа: http://jre.cplire.ru/jre/jul17/10/text.pdf]. В ней описан способ обработки сигналов, обеспечивающий получение кубической пеленгационной характеристики и аналитическое решение пеленгационного уравнения с точностью 1% ширины парциальной диаграммы направленности в рабочей зоне, увеличенной до ширины моноимпульсной группы лучей. Представлен алгоритм работы измерителя угловых координат с кубической пеленгационной характеристикой в радиолокационной системе на базе антенной решетки, обладающий повышенными скоростью и точностью.
Однако, в аналоге [4] не рассмотрено одновременное определение двух УК и параметров траекторий движения перемещающихся целей.
Так как высокоточное одновременное измерение двух УК в обзорной моноимпульсной РЛС имеет некоторые особенности, для него целесообразно использовать способ [5 - патент 2615491, РФ, G01S 13/44, H01G 21/00. Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала / Джиоев А.Л., Омельчук И.С., Яковленко В.В. Заявл. 17.11.2015, опубл. 5.04.2017]. Работу [5] также можно считать аналогом заявляемого способа; в ней показано, что при одновременном измерении двух УК цели, значение одной координаты зависит от значения другой (ортогональной) координаты относительно равносигнального направления (РСН). Наличие такой зависимости вносит в измерение угловой координаты методическую ошибку. Для ее устранения предложено использовать апертуру антенной решетки (АР) прямоугольной формы и факторизацию весовой функции на апертуре; в этом случае время измерения сокращается приблизительно в три раза по сравнению со случаем использования эллиптической апертуры и/или нелинейной пеленгационной характеристики. Это объясняется тем, что при прямоугольной форме раскрыва и ВФ в виде произведения двух одномерных функций координат на раскрыве используемые уравнения перестают зависеть от ортогональной координаты [6 - Джиоев А.Л., Яковленко В.В. Устранение методической ошибки измерения угловых координат цели в обзорном амплитудном суммарно-разностном цифровом пеленгаторе на базе ФАР // Общие вопросы радиоэлектроники. Ростов-на-Дону: ФГУП «РНИИРС». 2015. Вып. 1. С. 47-57]. Ошибка измерения УК уменьшается до 1% ширины ДН по уровню половинной мощности.
Однако, в аналогах [5, 6] не рассмотрены способы определения параметров траекторий перемещающихся в пространстве целей и их местоположения.
Таким образом, изыскание способов определения параметров движения, траекторий ВЦ и их местоположения с высокой точностью, а также создание соответствующих РЛС, позволяющих решать качественно новые задачи по контролю воздушного пространства, являются актуальными.
Наиболее близким по технической сущности к заявляемому способу является [7 - патент 2337378, РФ, G01S 13/42. Способ определения параметров траектории движения воздушных целей в обзорных РЛС / Лихачев В.П., Мубарак Н.Х. Заявл. 2.07.2007, опубл. 27.10.2008], принятый за прототип. В нем определяются параметры траектории движения (радиальная и тангенциальная скорости воздушных целей) путем когерентного накопления отраженных от цели эхо-сигналов и специальной их обработки. Как указано в [7], основными операциями этого способа являются:
1. Излучение зондирующего сигнала и прием эхо-сигналов на интервале наблюдения, определение их квадратурных составляющих и запоминание результатов.
2. Оценка координат ВЦ (наклонных дальностей, радиальных и тангенциальных скоростей, азимутальных углов) в результате многоканальной взаимокорреляционной обработки принятых сигналов.
3. Оценка на горизонтальной плоскости значений горизонтальных составляющих векторов скорости цели и их курсовых углов.
4. Оценка параметров движения ВЦ.
В прототипе [7] при фиксированном времени наблюдения повышены точность определения таких параметров движения ВЦ, как тангенциальная и радиальная скорости, или при заданной точности уменьшено необходимое время наблюдения.
Недостатками прототипа являются:
- замена пространственного движения ВЦ движением по горизонтальной плоскости;
- использование значений наклонных дальностей при определении величин радиальной и тангенциальной составляющих скорости, что вносит дополнительные погрешности при построении траекторий их движения;
- выполнение расчетов модулей значений линейной скорости ВЦ на горизонтальной плоскости без учета скорости изменения их высот;
- использование при определении значений курсовых углов движения ВЦ двух составляющих скорости;
- недостаточная точность решения задач местоопределения ВЦ, обусловленная использованием дальномерно-угломерного способа;
- необходимость выполнения большого объема вычислений при измерениях координат и параметров траекторий ВЦ.
Технических решений, обеспечивающих высокую скорость обзора при высокоточном определении координат, траекторий перемещающихся в пространстве ВЦ и их местоположения, авторами предлагаемого изобретения не обнаружено.
Технической проблемой, на решение которой направлен предлагаемый способ, является повышение точности определения параметров движения, траекторий перемещающихся в пространстве ВЦ и их местоположения при обзорной однопозиционной радиолокации.
Для решения этой технической проблемы предлагается способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей, при котором
обеспечивают в радиолокационной системе, находящейся в начале координат 0, излучение зондирующих импульсов и прием отраженных сигналов с помощью цифровой антенной решетки или антенной решетки с цифровой обработкой сигналов и, используя на раскрыве этой антенной решетки весовую функцию Хэмминга, формируют в пространстве моноимпульсную группу лучей с общим фазовым центром,
описывают положение воздушных целей, перемещающихся в пространстве по траекториям с произвольными углами пикирования или кабрирования, значениями: угловых координат - азимута βk и угла места εk, наклонных дальностей R0,k, модулей векторов скорости Vk и величин курсовых углов γk между векторами скоростей и наклонных дальностей, где  - номера точек А1, А2, …, Ak траекторий, соответствующие моментам времени t1, t2, …, tk, отстоящих друг от друга на период обзора заданной области пространства Тобз,
- номера точек А1, А2, …, Ak траекторий, соответствующие моментам времени t1, t2, …, tk, отстоящих друг от друга на период обзора заданной области пространства Тобз,
обеспечивают линейность пеленгационных характеристик системы в пределах ширины моноимпульсной группы лучей ΔβПХ по азимуту и ΔεПХ по углу места за счет специального выбора углов смещения βсм и εсм этих лучей от РСН,
разбивают заданную область обзора пространства на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая РСН моноимпульсной группы лучей в центры этих участков, излучают зондирующие импульсы с периодом повторения ТП и принимают сигналы, отраженные от воздушных целей, в течение интервала наблюдения ТН на каждом участке разбиения, осуществляя обзор заданной области за время Тобз,
констатируют обнаружение совокупности  целей в упомянутой области обзора, измеряют и запоминают, с привязкой к единому времени, для каждой из обнаруженных воздушных целей значения наклонных дальностей R0,k и угловых координат, вычисляемых относительно равносигнальных направлений, как
целей в упомянутой области обзора, измеряют и запоминают, с привязкой к единому времени, для каждой из обнаруженных воздушных целей значения наклонных дальностей R0,k и угловых координат, вычисляемых относительно равносигнальных направлений, как


где 
 - сигналы угловых рассогласований с выходов угловых дискриминаторов;
- сигналы угловых рассогласований с выходов угловых дискриминаторов;
 - значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях βсм и εсм.
- значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях βсм и εсм.
Согласно изобретению,
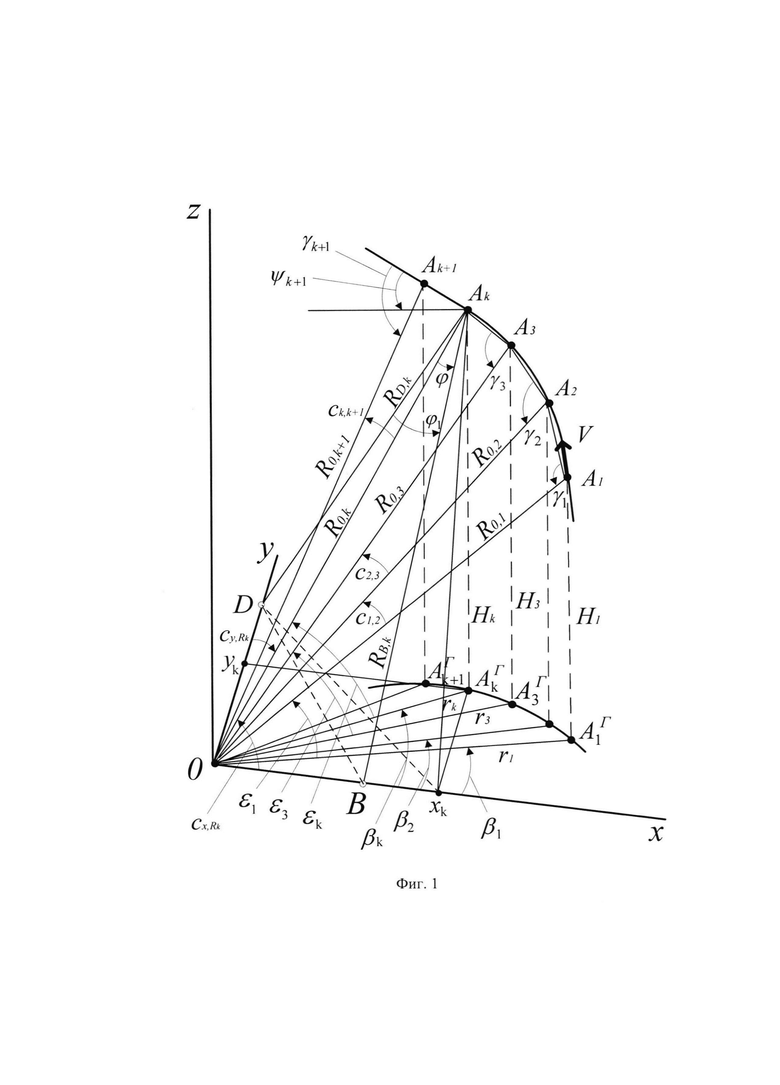
заменяют пространственное движение каждой воздушной цели по конической поверхности, направляющей для которой является траектория цели, а образующей - вектор наклонной дальности, последовательностью перемещений по направляющей многогранной поверхности, образованной совокупностью смежных наклонных треугольников 0AkAk+1 с вершинами в начале координат и аппроксимирующей реальную криволинейную коническую поверхность,
определяют местоположение цели на упомянутой направляющей многогранной поверхности наклонными дальностями R0,k, R0,k+1,
представляют траектории целей последовательностями отрезков А1, А2, А2 A3 и т.д., являющихся основаниями упомянутых смежных треугольников, причем длина Sk,k+1 каждого из таких отрезков равна произведению модуля скорости цели  на время его обзора
на время его обзора
а изменения высоты полета описываются углами ψk пикирования или кабрирования,
вычисляют для моментов времени tk в течение интервалов наблюдения TH по  значений косинусов углов между наклонной дальностью R0,k и осями абсцисс x и ординат y
значений косинусов углов между наклонной дальностью R0,k и осями абсцисс x и ординат y


где  - номер отсчета угловой координаты на интервале TH,
- номер отсчета угловой координаты на интервале TH,
используют для образования трилатерационной радиолокационной системы вспомогательные точки В на оси абсцисс и D на оси ординат, отстоящие на расстояние d от начала координат, и вычисляют по G значений дальностей RB,k и RD,k до цели от точек В и D


определяют, используя оператор экспоненциального сглаживания, их отфильтрованные значения
где  - параметр сглаживания,
- параметр сглаживания,
вычисляют и запоминают значения прямоугольных координат целей
сглаживают их значения фильтрами Калмана, рассчитывают сглаженные значения угловых координат целей
принимают решения об обнаружении начальных точек траекторий,
формируют размеры зон селекции целей, ограничивая их:
- по дальности в моменты времени tk+1=tk+Тобз сферами с центрами в точках Ak+1 и радиусами  где V0,ср - среднее значение скорости цели,
где V0,ср - среднее значение скорости цели,
- по азимуту и углу места лучами, проведенными из начала координат под углами
при повторном обзоре измеряют значения R0,k+1, β0,k+1, ε0,k+1 целей и определяют принадлежность новых отсчетов к начальным участкам траекторий ранее обнаруженных целей, вычисляют для каждой сопровождаемой цели значения углов  дальностей
дальностей  и координат
и координат  определяют приращения прямоугольных и угловых координат
определяют приращения прямоугольных и угловых координат 
используют экстраполированные значения прямоугольных координат с выходов фильтров Калмана для формирования зон селекции в точках Ak+2 траекторий целей, по результатам последующих обзоров осуществляют обнаружение траекторий целей по критерию «три из трех», то есть по наличию трех отсчетов в трех обзорах,
вычисляют длины отрезков, пройденных целями за время Тобз,

определяют значения
- модулей векторов скоростей целей
- их пространственных курсовых углов
- приращений высот
- и углов пикирования или кабрирования
измеряют координаты воздушных целей в последующих обзорах, производят сопровождение целей, а затем - построение траекторий их движения, определяя последние прямоугольными координатами точек Ak и векторами  их соединяющими, являющимися основаниями смежных наклонных треугольников, образующих в совокупности многогранные поверхности, аппроксимирующие упомянутые реальные криволинейные поверхности, по направляющим которых движутся воздушные цели.
их соединяющими, являющимися основаниями смежных наклонных треугольников, образующих в совокупности многогранные поверхности, аппроксимирующие упомянутые реальные криволинейные поверхности, по направляющим которых движутся воздушные цели.
Техническим результатом предлагаемого изобретения являются математические соотношения, описывающие способ трилатерационной радиолокации, и структура трилатерационной РЛС, реализующей предложенный способ, обеспечивающие точное определение местоположения, параметров движения и траекторий лоцируемых воздушных целей.
Предлагаемое изобретение не известно в современной радиотехнике, а также не известны источники информации, содержащие сведения об аналогичных технических решениях, имеющих признаки, сходные с совокупностью признаков, отличающей заявляемое решение от прототипа, а также имеющих свойства, совпадающие со свойствами заявляемого решения. Поэтому можно считать, что они обладают существенными отличиями, вытекают из них неочевидным образом и, следовательно, соответствуют критериям «новизна» и «изобретательский уровень».
Сущность изобретения поясняется следующими фигурами:
фигура 1 - геометрия задачи в пространстве;
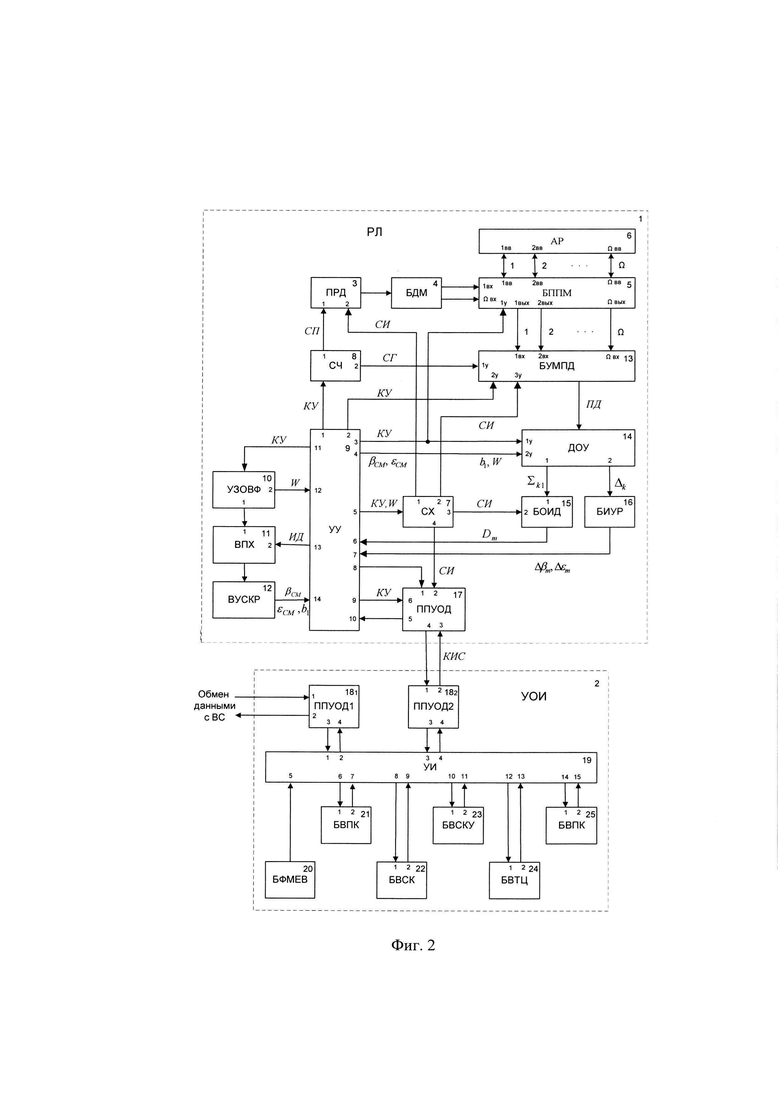
фигура 2 - структурная схема устройства, реализующего предложенный способ.
При реализации предложенного способа выполняется следующая последовательность операций.
1. Обеспечивают в радиолокационной системе, находящейся в начале координат 0, излучение зондирующих импульсов и прием отраженных сигналов с помощью цифровой антенной решетки или антенной решетки с цифровой обработкой сигналов и, используя на раскрыве этой антенной решетки весовую функцию Хэмминга, формируют в пространстве моноимпульсную группу лучей с общим фазовым центром.
2. Описывают положение воздушных целей, перемещающихся в пространстве по траекториям с произвольными углами пикирования или кабрирования, значениями: угловых координат - азимута βk и угла места εk, наклонных дальностей R0,k, модулей векторов скорости Vk и величин курсовых углов γk между векторами скоростей и наклонных дальностей, где  - номера точек А1, А2, …, Ak траекторий, соответствующие моментам времени t1, t2, …, tk, отстоящих друг от друга на период обзора заданной области пространства Тобз.
- номера точек А1, А2, …, Ak траекторий, соответствующие моментам времени t1, t2, …, tk, отстоящих друг от друга на период обзора заданной области пространства Тобз.
3. Обеспечивают линейность пеленгационных характеристик системы в пределах ширины моноимпульсной группы лучей ΔβПХ по азимуту и ΔεПХ по углу места за счет специального выбора углов смещения βсм и εсм этих лучей от РСН.
4. Разбивают заданную область обзора пространства на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая равносигнальное направление моноимпульсной группы лучей в центры этих участков, излучают зондирующие импульсы с периодом повторения ТП и принимают сигналы, отраженные от воздушных целей, в течение интервала наблюдения ТН на каждом участке разбиения, осуществляя обзор заданной области за время Тобз.
5. Констатируют обнаружение совокупности  целей в упомянутой области обзора, измеряют и запоминают, с привязкой к единому времени, для каждой из обнаруженных воздушных целей значения наклонных дальностей R0,k и угловых координат, вычисляемых относительно равносигнальных направлений, как
целей в упомянутой области обзора, измеряют и запоминают, с привязкой к единому времени, для каждой из обнаруженных воздушных целей значения наклонных дальностей R0,k и угловых координат, вычисляемых относительно равносигнальных направлений, как

где 
 - сигналы угловых рассогласований с выходов угловых дискриминаторов;
- сигналы угловых рассогласований с выходов угловых дискриминаторов;
 - значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях βсм и εсм.
- значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях βсм и εсм.
6. Заменяют пространственное движение каждой воздушной цели по конической поверхности, направляющей для которой является траектория цели, а образующей -вектор наклонной дальности, последовательностью перемещений по направляющей многогранной поверхности (здесь направляющая и образующая - термины стереометрии для конической поверхности), образованной совокупностью смежных наклонных треугольников 0AkAk+1 с вершинами в начале координат и аппроксимирующей реальную криволинейную коническую поверхность.
7. Определяют местоположение цели на упомянутой направляющей многогранной поверхности наклонными дальностями R0,k, R0,k+1.
8. Представляют траектории целей последовательностями отрезков А1, А2, А2 A3 и т.д., являющихся основаниями упомянутых смежных треугольников, причем длина Sk,k+1 каждого из таких отрезков равна произведению модуля скорости цели  на время его обзора
на время его обзора
а изменения высоты полета описываются углами ψk пикирования или кабрирования.
9. Вычисляют для моментов времени tk в течение интервалов наблюдения TH по  значений косинусов углов между наклонной дальностью R0,k и осями абсцисс x и ординат у
значений косинусов углов между наклонной дальностью R0,k и осями абсцисс x и ординат у
где  - номер отсчета угловой координаты на интервале TH,
- номер отсчета угловой координаты на интервале TH,
10. Используют для образования трилатерационной радиолокационной системы вспомогательные точки В на оси абсцисс и D на оси ординат, отстоящие на расстояние d от начала координат, и вычисляют по G значений дальностей RB,k и RD,k до цели от точек В и D
11. Определяют, используя оператор экспоненциального сглаживания, их отфильтрованные значения
где - параметр сглаживания,
- параметр сглаживания,
то есть для точки А1 рассчитываем сглаженные значения дальностей  :
:
и дальностей 
 и т.д.
и т.д.
12. Вычисляют и запоминают значения прямоугольных координат целей
13. Сглаживают их значения фильтрами Калмана, рассчитывают сглаженные значения угловых координат целей

14. Принимают решения об обнаружении начальных точек траекторий.
15. Формируют размеры зон селекции целей, ограничивая их:
- по дальности в моменты времени tk+1=tk+Тобз сферами с центрами в точках Ak+1 и радиусами  где V0,ср - среднее значение скорости цели,
где V0,ср - среднее значение скорости цели,
- по азимуту и углу места лучами, проведенными из начала координат под углами
16. При повторном обзоре измеряют значения R0,k+1, β0,k+1, ε0,k+1 целей и определяют принадлежность новых отсчетов к начальным участкам траекторий ранее обнаруженных целей, вычисляют для каждой сопровождаемой цели значения углов  , дальностей
, дальностей  и координат
и координат  определяют приращения прямоугольных и угловых координат
определяют приращения прямоугольных и угловых координат 
17. Используют экстраполированные значения прямоугольных координат с выходов фильтров Калмана для формирования зон селекции в точках Ak+2 траекторий целей, по результатам последующих обзоров осуществляют обнаружение траекторий целей по критерию «три из трех», то есть по наличию трех отсчетов в трех обзорах.
18. Вычисляют длины отрезков, пройденных целями за время Тобз,

19. Определяют значения
- модулей векторов скоростей целей
- их пространственных курсовых углов
- приращений высот

- и углов пикирования или кабрирования
20. Измеряют координаты воздушных целей в последующих обзорах, производят сопровождение целей, а затем - построение траекторий их движения, определяя последние прямоугольными координатами точек Ak и векторами  , их соединяющими, являющимися основаниями смежных наклонных треугольников, образующих в совокупности многогранные поверхности, аппроксимирующие упомянутые реальные криволинейные поверхности, по направляющим которых движутся воздушные цели.
, их соединяющими, являющимися основаниями смежных наклонных треугольников, образующих в совокупности многогранные поверхности, аппроксимирующие упомянутые реальные криволинейные поверхности, по направляющим которых движутся воздушные цели.
Примером системы, реализующей предложенный способ, является обзорная однопозиционная трилатерационная некогерентная РЛС, структурная схема которой приведена на фигуре 2, где приняты следующие обозначения:
1 - радиолокатор (РЛ);
2 - устройство обработки информации (УОИ);
3 - передатчик (ПРД);
4 - блок делителей мощности (БДМ);
5 - блок приемо-передающих модулей (БППМ);
6 - антенная решетка (АР);
7 - синхронизатор (СХ);
8 - синтезатор частот (СЧ);
9 - устройство управления (УУ);
10 - устройство запоминания отсчетов весовой функции (УЗОВФ);
11 - вычислитель пеленгационных характеристик (ВПХ);
12 - вычислитель углов смещения максимумов ДН в МГЛ от РСН и коэффициентов разложения функции, описывающей ПХ (ВУСКР);
13 - блок умножителей и маршрутизатор потока данных (БУМПД);
14 - диаграммообразующее устройство (ДОУ) МГЛ;
15 - блок обнаружителей и измерителей дальностей (БОИД);
16 - блок измерителей угловых рассогласований (БИУР);
17 - приемо-передающее устройство обмена данными и ретрансляции сигналов (ППУОД);
181, 182 - приемо-передающие устройства обмена данными и ретрансляции сигналов (ППУОД1, ППУОД2);
19 - устройство интерфейсное (УИ);
20 - блок формирования меток единого времени (БФМЕВ);
21 - блок вычислителя прямоугольных координат (БВПК);
22 - блок вычислителя сферических координат (БВСК);
23 - блок вычислителя скоростей, пространственных курсовых углов и углов пикирования (БВСКУ);
24 - блок вычислителя траекторий целей (БВТЦ);
25 - блок вычислителя прогнозируемых координат целей (БВПК).
На фигуре 2 использованы дополнительные сокращения:
ВС - вышестоящая система,
ИД - исходные данные,
КИС - канал информационной связи,
КУ - команда управления,
ПД - поток данных,
СГ - сигнал гетеродина,
СИ - синхроимпульс,
СП - сигнал передатчика.
Обзорная однопозиционная трилатерационная некогерентная РЛС содержит (фигура 2) РЛ 1 и УОИ 2, соединенные дуплексным КИС.
В состав РЛ 1 входит ПРД 3, выход которого подключен ко входу БДМ 4, выходы которого соединены с входами 1вх…Ωвх БППМ 5. Входы-выходы 1вв…Ωвв БППМ 5 соединены с одноименными входами-выходами АР 6, а выходы 1вых…Ωвых БППМ 5 подключены к сигнальным входам 1вх…Ωвх БУМПД 13.
Первый выход СХ 7 соединен со вторым входом ПРД 3, первый вход которого подключен к первому выходу СЧ 8, второй выход которого подключен к первому управляющему входу 1у БУМПД 13, а ко второму управляющему входу 2у БУМПД 13 подключен второй выход УУ 9, первый выход которого соединен со входом СЧ 8.
Третий выход СХ 7 соединен со вторым входом БОИД 15, а четвертый выход СХ 7 подключен ко второму входу ППУОД 17, к первому входу которого подключен восьмой выход УУ 9. Ко входу СХ 7 подключен пятый выход УУ 9, а второй выход СХ 7 соединен с третьим управляющим входом 3у БУМПД 13. Сигнальный выход БУМПД 13 подключен к сигнальному входу ДОУ 14, первый выход которого подключен к первому входу БОИД 15, а второй выход ДОУ 14 подключен ко входу БИУР 16, выход которого соединен с седьмым входом УУ 9. К шестому входу УУ 9 подключен выход БОИД 15. Третий выход УУ 9 соединен с первыми управляющими входами 1у БППМ 5 и ДОУ 14, а четвертый выход УУ 9 - со вторым управляющим входом 2у ДОУ 14. Девятый выход УУ 9 подключен к шестому входу ППУОД 17, пятый выход которого соединен с десятым входом УУ 9.
Одиннадцатый выход УУ 9 подключен ко входу УЗОВФ 10, первый выход которого подключен к первому входу ВПХ 11, а второй выход - к двенадцатому входу УУ 9. Тринадцатый выход УУ 9 подключен ко второму входу ВПХ 11, выход которого соединен со входом ВУСКР 12. Выход ВУСКР 12 подключен к четырнадцатому входу УУ 9.
Третий вход и четвертый выход ППУОД 17 дуплексным КИС соединены соответственно со вторым выходом и первым входом ППУОД2 182.
Третий выход и четвертый вход ППУОД2 182 подключены соответственно к третьему входу и четвертому выходу УИ 19. К пятому входу УИ 19 подключен выход БФМЕВ 20, а первый вход и второй выход УИ 19 подключены соответственно к третьему выходу и четвертому входу ППУОД 1 181, первый вход и второй выход которого являются границей РЛС (соединяются с вышестоящей системой).
В состав РЛС введены вновь: БВПК 21, БВСК 22, БВСКУ 23, БВТЦ 24 и БВПК 25. Первый вход и второй выход БВПК 21 подключены соответственно к шестому выходу и седьмому входу УИ 19, а первый вход и второй выход БВСК 22 - соответственно к восьмому выходу и девятому входу УИ 19. Первый вход и второй выход БВСКУ 23 подключены соответственно к десятому выходу и одиннадцатому входу УИ 19, а первый вход и второй выход БВТЦ 24 - соответственно к двенадцатому выходу и тринадцатому входу УИ 19. При этом первый вход и второй выход БВПК 25 соединены соответственно с четырнадцатым выходом и пятнадцатым входом УИ 19.
Обзорная трехкоординатная однопозиционная трилатерационная РЛС работает следующим образом.
После включения электропитания команда управления с первого выхода УУ 9 радиолокатора 1 подается на СЧ 8, где формируется сигнал для передатчика, который с первого выхода СЧ 8 поступает на первый вход ПРД 3, и сигнал гетеродина, который со второго выхода СЧ 8 поступает на первый управляющий вход 1у БУМПД 13.
Геометрия задачи показана на фигуре 1, где в точке 0 находится РЛ, а в начальной точке А1 - лоцируемая ВЦ; далее ВЦ движется на рассматриваемых участках траектории прямолинейно и равномерно с произвольным углом пикирования (кабрирования) на высоте Hk над поверхностью земли, которая считается плоской. Если траектория движения цели криволинейна, то осуществляется ее кусочно-линейная аппроксимация. Лоцируемая ВЦ перемещается в пространстве со скоростью V, являющейся модулем вектора скорости V.
В упомянутом радиолокаторе 1 применяют цифровую АР или антенную решетку с цифровой обработкой сигналов и, используя на ее раскрыве весовую функцию Хэмминга, формируют в пространстве моноимпульсную группу лучей с общим фазовым центром. Выбирают значения специальных углов смещения βсм и εсм максимумов ДН в МГЛ от РСН и направляют данные с четвертого выхода УУ 9 на второй управляющий вход 2у ДОУ 14, обеспечивая, как показано в [2], линейность пеленгационных характеристик радиолокатора 1 в рабочих зонах ΔβПХ по азимуту и ΔεПХ по углу места, перекрывающих всю ширину МГЛ. На этот же вход 2у ДОУ 14 направляют отсчеты ВФ и коэффициенты разложения функции, описывающей ПХ.
Со второго выхода УУ 9 подаются команды управления на второй управляющий вход 2у БУМПД 13. Аналогичные команды управления подаются с третьего выхода УУ 9 на первые управляющие входы 1у БППМ 5 и ДОУ 14.
По командам управления, поступающим с пятого выхода УУ 9 на вход СХ 7, с первого выхода СХ 7 на второй вход ПРД 3 подаются синхроимпульсы; аналогичные синхроимпульсы подаются со второго выхода СХ 7 на третий управляющий вход 3у БУМПД 13, с третьего выхода СХ 7 - на второй вход БОИД 15 и с четвертого выхода СХ 7 - на второй вход ППУОД 17.
ПРД 3 генерирует зондирующие импульсы, которые подаются через БДМ 4 на входы 1вх…Ωвх БППМ 5, где эти импульсы усиливаются в канальных усилителях мощности и, после прохождения через канальные циркуляторы, поступают с входов-выходов 1вв…Ωвв в АР 6, антенные элементы которой излучают зондирующие импульсы в заданную область пространства.
Отраженные от лоцируемых ВЦ сигналы принимают антенными элементами из состава АР 6 и направляют в БППМ 5, каждый модуль которого содержит циркулятор, малошумящий усилитель (МШУ) и аналого-цифровой преобразователь (АЦП). Со входа модуля сигнал через циркулятор поступает в канальный МШУ и далее преобразуется на промежуточную частоту, а затем подвергается аналого-цифровому преобразованию. С выходов 1вых…Ωвых БППМ 5 отсчеты смеси эхо-сигналов и шумов подаются на сигнальные входы 1вх…Ωвх БУМПД 13, где формируется соответствующий поток данных. Он с выхода БУМПД 13 направляется на сигнальный вход ДОУ 14, где осуществляется его весовая обработка путем умножения на отсчеты весовой функции W(x, у) Хэмминга. Эти отсчеты извлекаются из устройства УЗОВФ 10 по команде управления, поступающей с одиннадцатого выхода УУ 9, и подаются со второго выхода УЗОВФ 10 на двенадцатый вход УУ 9.
С первого выхода УЗОВФ 10 отсчеты ВФ подаются также на первый вход ВПХ 11, на второй вход которого поступают ИД с тринадцатого выхода УУ 9. Значения ПХ направляются с выхода ВПХ 11 на вход ВУСКР 12, где вычисляются углы смещения максимумов ДН в МГЛ от РСН, которые вместе с коэффициентами разложения функции, описывающей ПХ, подаются на четырнадцатый вход УУ 9.
В ДОУ 14 формируется моноимпульсная группа лучей с общим фазовым центром, состоящая из двух пар лучей, смещенных от РСН на углы  по азимуту и
по азимуту и  по углу места, обеспечивая в моноимпульсном РЛ 1 линейные ПХ с размером ΔβПХ по азимуту и ΔεПХ по углу места, соответственно.
по углу места, обеспечивая в моноимпульсном РЛ 1 линейные ПХ с размером ΔβПХ по азимуту и ΔεПХ по углу места, соответственно.
При поступлении с первого выхода ДОУ 14 на первый вход БОИД 15 суммарного сигнала в нем определяют, с учетом поступающего на второй вход БОИД 15 синхроимпульса с третьего выхода СХ 7, время запаздывания эхо-сигналов и дальности до лоцируемых целей. Эти данные с выхода БОИД 15 направляют на шестой вход УУ 9.
Обзор пространства осуществляют за счет сканирования МГЛ, для чего разбивают заданную область обзора пространства на (L+1)×(N+1) участков с размером каждого ΔβПХ вдоль азимутального и ΔεПХ вдоль угломестного направлений. Затем, последовательно устанавливая РСН моноимпульсной группы лучей в центры участков
где 
 - номера участков разбиения по азимуту и углу места соответственно, осуществляют дискретный обзор упомянутой области обзора. В течение интервала наблюдения Δt на каждом участке разбиения производят обнаружение всей совокупности
- номера участков разбиения по азимуту и углу места соответственно, осуществляют дискретный обзор упомянутой области обзора. В течение интервала наблюдения Δt на каждом участке разбиения производят обнаружение всей совокупности  лоцируемых целей.
лоцируемых целей.
Со второго выхода ДОУ 14 значения углов отклонения от РСН подаются на вход БИУР 16, где вычисляются значения приращений азимутов и углов места, которые с выхода БИУР 16 поступают на седьмой вход УУ 9. В нем запоминают, с привязкой к системе единого времени при использовании данных БФМЕВ 20, для каждой из обнаруженных целей значения отсчетов наклонных дальностей и угловых координат, вычисляемых относительно РСН в результате решения соответствующих линейных уравнений с использованием коэффициентов линейных частей разложений ПХ в ряды Маклорена как функций углов βсм, εсм.
Результаты измерений дальностей и УК целей по команде управления, поступающей с девятого выхода УУ 9, направляют по каналу информационной связи с устройства ППУОД 17 через ППУОД2 182 в УИ 19, а затем в БВПК 21, в котором рассчитываются значения прямоугольных координат ВЦ. Эти же результаты поступают в БВСК 22, в котором определяются параметры движения ВЦ на наклонных плоскостях. На основе рассчитанных в БВСК 22 данных об углах Ck+1,k на наклонных плоскостях и длинах путей Sk+1,k, пройденных ВЦ за время обзора, в БВСКУ 23 определяются пространственные курсовые углы γk и углы пикирования ψk.
Далее в БВТЦ 24 строят криволинейные траектории движения лоцируемых целей, аппроксимируя их совокупностью отрезков Sk+1,k, Sy, а в БВПК 25 - прогнозируемые координаты ВЦ. Эти данные через ППУОД1 181 направляются в вышестоящую систему.
Предложенный способ, на основе измерения сферических координат ВЦ и расчета дополнительных дальностей RB,k, RD,k и углов ck+1,k, обеспечивает:
- определение прямоугольных координат ВЦ и их приращений,
- расчет длин отрезков траекторий целей между точками Ak и Ak+1

- их использование для аппроксимации траекторий ВЦ,
- вычисление значений модулей векторов скоростей целей
- определение значений пространственных курсовых углов
- определение значений углов пикирования или кабрирования
Среднеквадратические погрешности (СКП) расчета значений параметров движения целей определяются величинами ошибок измерения дальностей σR и угловых координат σβ, σε. При выполнении условий  и
и  СКП вычисления модулей скоростей целей и курсовых углов определяются формулами
СКП вычисления модулей скоростей целей и курсовых углов определяются формулами
При величинах  γk=45°, Tобз=10 сек, ck+1,k=10° и
γk=45°, Tобз=10 сек, ck+1,k=10° и  относительные значения СКП
относительные значения СКП
не превосходят величины 10-2.
В прототипе для определения значений этих параметров используются формулы
В этом случае СКП определения параметров равны

и при ⏐Vk⏐=300 м/сек, γk=45° имеем

Следовательно, предложенный способ обеспечивает повышение точности измерений модулей скорости ВЦ и их пространственных курсовых углов в 5 и 8 раз соответственно.
Для комплексной оценки качества предлагаемого способа сравним величины СКП местоопределения целей способом-прототипом и предложенным способом.
В способе-прототипе местоположение целей находится как область пересечения сферической поверхности радиуса R0,k с толщиной стенки  и конической поверхности, образующей которой является наклонная дальность R0,k, а угол при вершине равен σУК [8 - Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. - М.: Радио и связь, 1986. 264 с]. СКП местоопределения в этом случае, при
и конической поверхности, образующей которой является наклонная дальность R0,k, а угол при вершине равен σУК [8 - Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. - М.: Радио и связь, 1986. 264 с]. СКП местоопределения в этом случае, при  равна
равна

В предложенном способе местоположение целей находится как область пересечения трех сфер [9 - Бакулев П.А. Радиолокационные системы. - М.: Радиотехника, 2007. 376 с] с центрами в точках 0, В, D и радиусами R0, RB, RD, а СКП местоопределения составляет
где  - СКП расчета дальности
- СКП расчета дальности 

 - параметр сглаживания;
- параметр сглаживания;
 - угол между дальностями R0,k и RB,k на наклонной плоскости 0AkBk;
- угол между дальностями R0,k и RB,k на наклонной плоскости 0AkBk;
 - угол между дальностями
- угол между дальностями  на наклонной плоскости DAkxk,
на наклонной плоскости DAkxk,
В случае, когда  σУК=0,3°, R0=105 м, ϕ=11°30', ϕ1=17°30', d=2×104 м, βk=εk=45°, α=0,2 имеем
σУК=0,3°, R0=105 м, ϕ=11°30', ϕ1=17°30', d=2×104 м, βk=εk=45°, α=0,2 имеем  σМОСП=735 м, σМОПС=141,84 м. При этом отношение СКП способа-прототипа и предложенного способа составляет
σМОСП=735 м, σМОПС=141,84 м. При этом отношение СКП способа-прототипа и предложенного способа составляет 
Реализация заявляемого способа не встречает затруднений при современном уровне развития радиотехники и устройств аналоговой и цифровой обработки сигналов. Возможность реализации предложенного способа обеспечивает ему критерий «промышленная применимость».
По сравнению с прототипом, использование операций предложенного способа обеспечивает определение местоположения воздушных целей со среднеквадратическими погрешностями, меньшими в 5,18 раза, а также:
- повышение в 5 раз точности измерений модулей векторов скоростей воздушных целей;
- повышение в 8 раз точности измерений пространственных курсовых углов ВЦ.
Полученные результаты позволяют обеспечить, на основе использования точно измеренных дальностей до ВЦ, селекцию отдельных элементов перемещающихся в пространстве групповых целей и раздельное построение траекторий их движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2019 |
|
RU2699552C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| СПОСОБ КОМПЛЕКСНОГО ВЕДЕНИЯ РАДИОЛОКАЦИОННОЙ РАЗВЕДКИ СРЕДСТВАМИ АКТИВНОЙ, ПАССИВНОЙ И АКТИВНО-ПАССИВНОЙ ЛОКАЦИИ В ЕДИНОМ РАДИОЛОКАЦИОННОМ ПОЛЕ | 2024 |
|
RU2831131C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2466423C2 |
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И МОНОИМПУЛЬСНАЯ РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2802886C1 |
Изобретение относится к области радиотехники и может использоваться в наземных системах активной обзорной однопозиционной радиолокации для обнаружения и определения местоположения, параметров движения и траекторий перемещающихся в пространстве воздушных целей. Достигаемый технический результат - более точное определение параметров движения и траекторий лоцируемых воздушных целей. Для достижения технического результата рассматривают движение каждой воздушной цели как последовательность перемещений по многогранной поверхности, аппроксимирующей лучом, задаваемым вектором наклонной дальности цели. Для образования трилатерационной системы используют вспомогательные точки В на оси абсцисс и D на оси ординат, отстоящие на расстояние d от начала координат, и вычисляют значения дальностей R от них до цели, значения прямоугольных координат целей, формируют размеры зон селекции целей по дальности и угловым координатам. При повторном обзоре измеряют значения наклонных дальностей, азимутов и углов места целей и определяют принадлежность новых отсчетов к начальным участкам траекторий ранее обнаруженных целей. Вычисляют для каждой сопровождаемой цели значения дальностей и координат. Используют экстраполированные значения прямоугольных координат с выходов фильтров Калмана для формирования зон селекции в точках Аk+2 траекторий целей. По результатам последующих обзоров осуществляют обнаружение траекторий целей по критерию «три из трех», вычисляют значения расстояний, пройденных целями за время обзора, модулей векторов их скоростей и пространственных курсовых углов, а также высот полета и углов пикирования или кабрирования. В последующих обзорах измеряют координаты целей и производят сопровождение и построение их траекторий. 2 ил.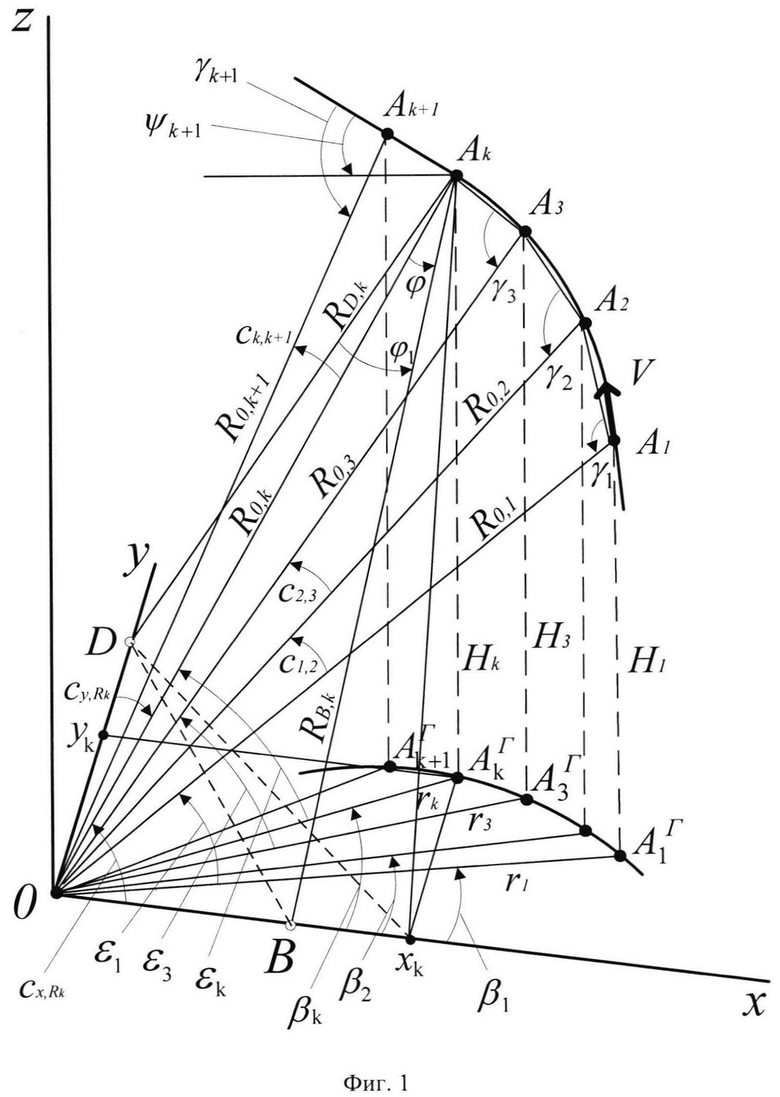
Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей, при котором обеспечивают в радиолокационной системе, находящейся в начале координат 0, излучение зондирующих импульсов и прием отраженных сигналов с помощью цифровой антенной решетки или антенной решетки с цифровой обработкой сигналов и, используя на раскрыве этой антенной решетки весовую функцию Хэмминга, формируют в пространстве моноимпульсную группу лучей с общим фазовым центром,
описывают положение воздушных целей, перемещающихся в пространстве по траекториям с произвольными углами пикирования или кабрирования, значениями: угловых координат - азимута βk и угла места εk, наклонных дальностей R0,k, модулей векторов скорости Vk и величин курсовых углов γk между векторами скоростей и наклонных дальностей, где  - номера точек А1,А2, …, Аk траекторий, соответствующие моментам времени t1, t2, …, tk, отстоящих друг от друга на период обзора заданной области пространства Тобз,
- номера точек А1,А2, …, Аk траекторий, соответствующие моментам времени t1, t2, …, tk, отстоящих друг от друга на период обзора заданной области пространства Тобз,
обеспечивают линейность пеленгационных характеристик системы в пределах ширины моноимпульсной группы лучей ΔβПХ по азимуту и ΔεПХ по углу места за счет специального выбора углов смещения βсм и εсм этих лучей от равносигнального направления,
разбивают заданную область обзора пространства на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая равносигнальное направление моноимпульсной группы лучей в центры этих участков, излучают зондирующие импульсы с периодом повторения ТП и принимают сигналы, отраженные от воздушных целей, в течение интервала наблюдения ТН на каждом участке разбиения, осуществляя обзор заданной области за время Тобз,
констатируют обнаружение совокупности  целей в упомянутой области обзора, измеряют и запоминают, с привязкой к единому времени, для каждой из обнаруженных воздушных целей значения наклонных дальностей R0,k и угловых координат, вычисляемых относительно равносигнальных направлений, как
целей в упомянутой области обзора, измеряют и запоминают, с привязкой к единому времени, для каждой из обнаруженных воздушных целей значения наклонных дальностей R0,k и угловых координат, вычисляемых относительно равносигнальных направлений, как

где
 - сигналы угловых рассогласований с выходов угловых дискриминаторов;
- сигналы угловых рассогласований с выходов угловых дискриминаторов;
 - значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях βсм и εсм,
- значения коэффициентов линейных членов разложений пеленгационных характеристик в ряды Маклорена по координатам β, ε при выбранных значениях βсм и εсм,
отличающийся тем, что
заменяют пространственное движение каждой воздушной цели по конической поверхности, направляющей для которой является траектория цели, а образующей - вектор наклонной дальности, последовательностью перемещений по направляющей многогранной поверхности, образованной совокупностью смежных наклонных треугольников 0АkАk+1 с вершинами в начале координат и аппроксимирующей реальную криволинейную коническую поверхность,
определяют местоположение цели на упомянутой направляющей многогранной поверхности наклонными дальностями R0,k, R0,k+1,
представляют траектории целей последовательностями отрезков А1 А2, А2 А3 и т.д., являющихся основаниями упомянутых смежных треугольников, причем длина Sk,k+1 каждого из таких отрезков равна произведению модуля скорости цели ⏐Vk⏐ на время его обзора
а изменения высоты полета описываются углами ψk пикирования или кабрирования,
вычисляют для моментов времени tk в течение интервалов наблюдения ТН по  значений косинусов углов между наклонной дальностью R0,k и осями абсцисс х и ординат у
значений косинусов углов между наклонной дальностью R0,k и осями абсцисс х и ординат у
где  - номер отсчета угловой координаты на интервале ТH,
- номер отсчета угловой координаты на интервале ТH,
используют для образования трилатерационной радиолокационной системы вспомогательные точки В на оси абсцисс и D на оси ординат, отстоящие на расстояние d от начала координат, и вычисляют по G значений дальностей RB,k и RD,k до цели от точек В и D
определяют, используя оператор экспоненциального сглаживания, их отфильтрованные значения
где  - параметр сглаживания,
- параметр сглаживания,
вычисляют и запоминают значения прямоугольных координат целей
сглаживают их значения фильтрами Калмана, рассчитывают сглаженные значения угловых координат целей

принимают решения об обнаружении начальных точек траекторий, формируют размеры зон селекции целей, ограничивая их:
- по дальности в моменты времени  - сферами с центрами в точках Аk+1 и радиусами
- сферами с центрами в точках Аk+1 и радиусами  где V0,cp - среднее значение скорости цели,
где V0,cp - среднее значение скорости цели,
- по азимуту и углу места - лучами, проведенными из начала координат под углами
при повторном обзоре измеряют значения R0,k+1, β0,k+1, ε0,k+1 целей и определяют принадлежность новых отсчетов к начальным участкам траекторий ранее обнаруженных целей, вычисляют для каждой сопровождаемой цели значения углов  ,
, дальностей
дальностей  и координат
и координат  определяют приращения прямоугольных и угловых координат
определяют приращения прямоугольных и угловых координат 
используют экстраполированные значения прямоугольных координат с выходов фильтров Калмана для формирования зон селекции в точках Аk+2 траекторий целей,
по результатам последующих обзоров осуществляют обнаружение траекторий целей по критерию «три из трех», то есть по наличию трех отсчетов в трех обзорах,
вычисляют длины отрезков, пройденных целями за время Тобз,

определяют значения
- модулей векторов скоростей целей
- их пространственных курсовых углов
- приращений высот
- и углов пикирования или кабрирования
измеряют координаты воздушных целей в последующих обзорах, производят сопровождение целей, а затем - построение траекторий их движения, определяя последние прямоугольными координатами точек Аk и векторами  , их соединяющими, являющимися основаниями смежных наклонных треугольников, образующих в совокупности многогранные поверхности, аппроксимирующие упомянутые реальные криволинейные поверхности, по направляющим которых движутся воздушные цели.
, их соединяющими, являющимися основаниями смежных наклонных треугольников, образующих в совокупности многогранные поверхности, аппроксимирующие упомянутые реальные криволинейные поверхности, по направляющим которых движутся воздушные цели.
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
| Способ обзора пространства и сопровождения трассы цели (варианты) и радиолокационный комплекс для его осуществления (варианты) | 2017 |
|
RU2673877C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2007 |
|
RU2337378C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| WO 2019091448 A1, 16.05.2019 | |||
| JP 3844429 B2, 15.11.2006 | |||
| US 9134409 B2, 15.09.2015 | |||
| JP 2011220800 A, 04.11.2011. | |||

