Изобретение относится к радиолокации и может быть использовано в обзорных радиолокационных станциях (РЛС) для разрешения целей по угловым направлениям в режимах обзора и сопровождения.
Задачи детального наблюдения объектов, обнаружение малоразмерных объектов, повышение точности целеуказания и помехозащищенности РЛС актуальны и могут быть реализованы в РЛС только с хорошим разрешением по дальности и угловым направлениям.
Использование в обзорных РЛС широкополосных зондирующих сигналов обеспечивает высокое разрешение по дальности ∂r, позволяющее формировать дальностный портрет целей, что крайне необходимо для решения задач распознавания и точного сопровождения целей.
Увеличение разрешающей способности по угловым направлениям в обзорных РЛС особенно актуально при реализации режима сопровождения целей на плоскости X,Y и решении задач распознавания за счет формирования портрета целей по угловым координатам (направлениям). Известно [1, с.161], что удовлетворительные характеристики по сопровождению целей на плоскости X,Y получаются, когда размеры стробов сопровождения по дальности и азимуту соизмеримы. В типовых 2(3)-координатных обзорных РЛС эти стробы несоизмеримы и, как правило, размер строба по дальности намного меньше строба по угловым направлениям.
Рассмотрим возможности увеличения разрешающей способности по угловым направлениям в обзорной РЛС на примере азимута.
Линейное разрешение по азимуту зависит от ширины антенного луча
 ,
,
где λ - длина волны РЛС, d - горизонтальный размер апертуры антенны, и на дальности R равно:
 .
.
Для обзорных РЛС выполняется условие ∂r<<∂l, что значительно ухудшает качество сопровождения целей обзорных РЛС и детализацию групповых целей по азимуту.
Прямым решением повышения точности и разрешающей способности по азимуту является создание остронаправленной антенны. Такое решение приводит либо к увеличению размеров антенной системы, либо, при фиксации габаритов антенны, требует уменьшения длины волны. Поэтому задача уменьшения элемента разрешения по азимуту без увеличения массогабаритных характеристик антенной системы представляет несомненный интерес для обзорных РЛС.
Существует несколько подходов, позволяющих увеличить разрешение по азимуту.
1. Одно из наиболее перспективных направлений радиолокации, позволяющее многократно увеличить разрешающую способность по азимутальной координате, это синтезирование апертуры. В РЛС с РСА (режим синтеза апертуры) используется перемещение носителя для формирования искусственной апертуры, которая обеспечивает потенциальное (идеальное) разрешение по азимуту, равное  [2, с.23].
[2, с.23].
Основное отличие синтезированных (искусственных) апертур от обычных (реальных) апертур антенны состоит в последовательном во времени ее формировании. В каждый момент времени прием электромагнитной волны ведется реальной апертурой, а синтезированная апертура является результатом последовательного во времени приема электромагнитной волны реальной апертурой при различном ее положении относительно источника электромагнитной волны. Т.е. для создания СА необходимо относительное перемещение фазового центра антенны или источника излучения.
Формирование апертуры перемещением реальной антенны при неподвижном источнике - прямое синтезирование, формирование апертуры перемещением источника излучения при неподвижной антенне - обратное синтезирование. Возможно также комбинированное синтезирование [3, с.435].
При любом методе СА разрешающая способность по азимутальной координате определяется шириной диаграммы направленности по азимуту синтезируемой антенной системы, длина которой на дальности R равна dc.
Тогда угловой размер синтезируемой апертуры:  , а линейное разрешение по азимуту
, а линейное разрешение по азимуту  .
.
При размере апертуры реальной антенны d, за N перемещений ее фазового центра при прямолинейном полете носителя, размер синтезируемой апертуры dc=N·d, где N - число тактов зондирования при перемещении фазового центра антенны на расстояние dc. Т.е. размер синтезируемой апертуры увеличивается в N раз, по сравнению с размером реальной апертуры. В результате чего, при синтезе апертуры независимо от дальности и длины волны станции достаточно просто реализуется элемент разрешения по азимуту, соизмеримый с элементом разрешения по дальности, что и является достаточным условием для реализации качественного сопровождения движущихся целей и формирования портрета целей по угловым направлениям.
Следует подчеркнуть, что, если для формирования синтезируемой апертуры используется весь раскрыв реальной антенны d, максимальное разрешение вдоль линии пути (по азимуту)  , где L - участок пути, на котором происходит синтез апертуры [2, с.23].
, где L - участок пути, на котором происходит синтез апертуры [2, с.23].
Недостатком РСА является значительное время формирования РЛИ, которое определяется временем пролета носителя участка L:
где R - дальность до цели, Vпут - путевая скорость пролета носителя, ΘЛ - ширина луча антенной системы.
В типовых обзорных РЛС за счет вращения антенной системы время наблюдения цели ограничено временем прохода луча через цель. За это время цель смещается, как правило, незначительно и синтез апертуры на основе анализа фазы отраженных колебаний, обусловленных относительным перемещением цели и фазового центра антенны, становится неэффективным. В предельном случае, когда цель неподвижна, расстояние между целью и фазовым центром вращающейся антенной системы не изменяется и разность фаз равна нулю для всех тактовых импульсов зондирования в пределах азимутальной пачки, синтез апертуры по неподвижным целям становится вообще невозможным [3, с.435].
2. В обзорных РЛС для повышения разрешения по азимуту используется межтактовое расширение спектра зондирующих сигналов при сканировании (обзоре) по азимутальной координате [4].
Суть этого патента, принятого за прототип, заключается в использовании метода межтактового расширения спектра зондирующих сигналов для улучшения разрешающей способности по азимуту для обзорных РЛС.
Отражения от одиночной цели в обзорных РЛС с механическим вращением луча антенной системы в азимутальной плоскости представляют собой последовательность импульсов, огибающая которых промодулирована диаграммой направленности (ДН) антенны на прием-передачу. Последовательность этих импульсов можно рассматривать как единый сигнал. Ширина спектра такого сигнала равна  , где N - число импульсов в азимутальной пачке, Т - период следования импульсов РЛС
, где N - число импульсов в азимутальной пачке, Т - период следования импульсов РЛС
( , где Fm - тактовая частота следования зондирующего сигнала). Введение в последовательность зондирующих сигналов межтактовой модуляции (в частности, бинарной фазовой модуляции в соответствии с кодами длины N (М-последовательности)) позволяет расширить спектр азимутальной последовательности до
, где Fm - тактовая частота следования зондирующего сигнала). Введение в последовательность зондирующих сигналов межтактовой модуляции (в частности, бинарной фазовой модуляции в соответствии с кодами длины N (М-последовательности)) позволяет расширить спектр азимутальной последовательности до  , т.е. увеличить его в N раз.
, т.е. увеличить его в N раз.
Механическое вращение ДН антенны по азимуту модулирует часть периодической М-последовательности зондирующих сигналов в соответствии с азимутальным положением цели (т.е. формирует усеченную М-последовательность (непериодическую последовательность длиной в период N)). Фазовая структура принимаемых колебаний, отраженных от одиночной цели, становится зависимой от азимутального положения цели, что и определяет возможность более точного измерения ее азимутального положения. Дальнейшая обработка модулированной диаграммой направленности азимутальной пачки заключается в применении оптимального фильтра сжатия с предварительной компенсацией доплеровского набега фазы, вызванного движением цели, и случайного набега фазы, что позволяет укоротить ее пропорционально числу импульсов в пачке.
Отличительными особенностями улучшения разрешающей способности по азимутальной координате для обзорных РЛС за счет метода расширения спектра зондирующих сигналов при сканировании по азимутальной координате являются малое время формирования высокого разрешения по азимуту, которое определяется временем сканирования (проходом луча ДН РЛС в направлении на цель) и улучшение элемента разрешения по азимуту, величина которого определяется тактовой частотой Fm следования зондирующего сигнала (чем больше Fm, тем меньше элемент разрешения по азимуту). Но при увеличении Fm уменьшается максимальная дальность до цели, которая обратно пропорциональна Fm. Следовательно, предельное разрешение по азимуту ограничено тактовой частотой следования импульсов в РЛС.
Поэтому для обзорных РЛС возникает задача получения высокого разрешения по азимуту, равного разрешению в РСА, за время прохода луча через цель.
Поставленная задача особенно актуальна при формировании 3-мерных изображений объектов, т.к. применение РСА для формирования таких изображений требует одновременного перемещения по двум координатам X,Y, что невозможно реализовать однопозиционными РЛС.
Суть заявки заключается в применении алгоритмов, эквивалентных по эффективности СА, для вращающейся и неподвижной антенной системы, осуществляющих обзор пространства в заданном секторе угловых направлений.
Технический результат заявляемого изобретения - получение для обзорных РЛС за время прохода луча через цель потенциальной разрешающей способности по угловым координатам, равной, как и в РСА, половине размера апертуры антенны по соответствующим координатам.
Принцип функционирования алгоритмов обработки сигналов для увеличения разрешающей способности по азимуту заключается в измерении азимутальных, в общем случае угловых, направлений на цель в пределах азимутальной пачки моноимпульсным методом и последующем синтезе пространственных частот [5, с.103], которые соответствуют этим направлениям. В этом случае, синтезируемые пространственные частоты будут соответствовать эквивалентному прямолинейному движению носителя в пределах ширины ДН реального луча, где каждому угловому направлению соответствует своя частота Доплера. Применение моноимпульсных методов измерения угловых направлений необходимо для обеспечения высокого разрешения по дальности для раздельного обнаружения блестящих точек обнаруживаемых объектов [6].
При вращении антенны угловое направление на цель необходимо измерять соответствующим моноимпульсным измерителем (интерферометром, двумя перекрывающимися лучами и т.п.).
Отметим, что вращение можно заменить электронным сканированием и применять неподвижные антенны типа ФАР, что особенно важно при формировании 3-координатного портрета целей.
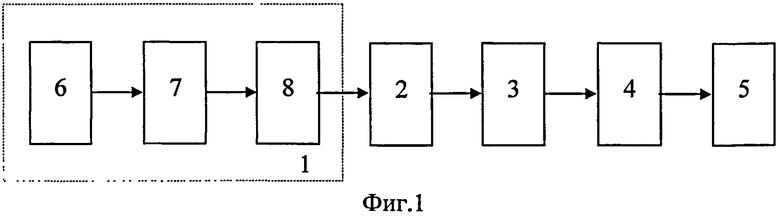
Структурная схема заявляемого устройства получения высокой разрешающей способности по угловым координатам при вращении (сканировании) антенной системы по соответствующей угловой координате показана на фиг.1
Предлагаемое устройство для получения высокой разрешающей способности по угловым координатам, входящее в состав обзорной РЛС, содержит последовательно соединенные 1 - моноимпульсный измеритель угловых направлений, 2 - интерполятор, 3 - преобразователь в спектральную область пространственных частот, 4 - линейно-частотно модулированный (ЛЧМ) фильтр сжатия, 5 - формирователь изображения, 6 - антенная система, 7 - фильтр, 8 - дискриминатор угловых направлений.
Моноимпульсный измеритель угловых направлений 1, показанный на фиг.1, представляет собой антенную систему 6 с ДН, позволяющей измерять угловые направления на цель моноимпульсным методом, с последовательно подключенным к ней фильтром 7 и дискриминатором угловых направлений 8.
Принцип работы моноимпульсного измерителя угловых направлений заключается в формировании амплитудных или фазовых различий принимаемых колебаний в зависимости от углового положения источника излучений отраженных эхо-сигналов.
Фильтр 7 предназначен для фильтрации принимаемых колебаний на фоне собственных шумов приемника и помех. Данные операции могут быть реализованы с помощью традиционных методов, осуществляющих, например, межпериодную фильтрацию [7, с.184]. Фильтрация необходима для максимизации отношения сигнал/шум на входе дискриминатора угловых направлений.
На выходе дискриминатора угловых направлений 8 формируются результаты последовательных измерений угловых направлений  на цель в пределах ширины диаграммы направленности реальной антенной моноимпульсной системы при сканировании ее в заданном секторе обзора. Обзор сектора заданной зоны может осуществляться сканированием за счет вращения антенной системы или электронным сканированием в соответствующей плоскости, что наиболее приемлемо для формирования 3-мерных изображений.
на цель в пределах ширины диаграммы направленности реальной антенной моноимпульсной системы при сканировании ее в заданном секторе обзора. Обзор сектора заданной зоны может осуществляться сканированием за счет вращения антенной системы или электронным сканированием в соответствующей плоскости, что наиболее приемлемо для формирования 3-мерных изображений.
Результаты измерений угловых направлений можно представить в виде:

Ω - угловая скорость вращения (сканирования) антенного луча в
заданном угловом секторе,
t0 - момент времени, соответствующий направлению на цель.
Линейная скорость прохода антенного луча через цель при сканировании на дальности R равна v=R·Ω, а эквивалентная прямолинейному движению антенной системы частота Доплера в направлении α(t) равна [5, с.98]:

В результате, на основе измерения угловых направлений можно синтезировать сигнал, фаза которого меняется по квадратичному закону, как и в случае прямолинейного перемещения антенной системы [7, с.195].
Таким сигналом является ЛЧМ сигнал, база которого D есть произведение полосы сигнала ΔF на время наблюдения за объектом Тнаб=Тсинт, и согласно формулам (2) и (4), где
 ,
,  ,
, 
Для обеспечения однозначного измерения угловых направлений и синтезирования соответствующих им сигналов на больших дальностях, где линейное расстояние между тактами измерения велико, предлагается использовать интерполяцию результатов измерения по критерию минимума среднеквадратичного отклонения от прямой линии, которая соответствует идеальным и непрерывным результатам измерения угловых направлений в угловом секторе, определяемым раскрывом реальной апертуры. Интерполированные в 2 результаты измерения преобразуются в 3 в область пространственных частот и сжимаются в ЛЧМ-фильтре 4 по угловым направлениям до величины ∂l в каждом элементе разрешения по дальности.
Обработка синтезированного сигнала осуществляется на основе корреляционного интеграла (свертки), в результате которой его длительность укорачивается в D раз [7, с.195]:
Заявляемый способ получения высокого разрешения по любой угловой координате (по какой осуществляется сканирование антенной системы), реализуемый в предлагаемом устройстве фиг.1, входящем в состав обзорной РЛС, осуществляется следующим образом.
Излучаемые зондирующие импульсы, отраженные от объекта, поступают на вход антенной системы 6 моноимпульсного измерителя угловых направлений 1, где обрабатываются фильтром 7 для максимизации отношения сигнал/шум на входе дискриминатора угловых направлений 8. На выходе дискриминатора угловых направлений 8 формируются результаты последовательных измерений угловых направлений на объект  в пределах ширины диаграммы направленности реальной антенной системы, согласно формуле (3). Результаты измерения угловых направлений на объект интерполируются по критерию минимума среднеквадратичного отклонения от прямой линии в интерполяторе 2, для обеспечения измерения угловых направлений на всех дальностях. Интерполированные результаты измерения угловых направлений превращаются преобразователем 3 в пространственные частоты
в пределах ширины диаграммы направленности реальной антенной системы, согласно формуле (3). Результаты измерения угловых направлений на объект интерполируются по критерию минимума среднеквадратичного отклонения от прямой линии в интерполяторе 2, для обеспечения измерения угловых направлений на всех дальностях. Интерполированные результаты измерения угловых направлений превращаются преобразователем 3 в пространственные частоты  , согласно формуле (4), и синтезируется сигнал (фаза которого меняется по квадратичному закону), который поступает на вход ЛЧМ-фильтра сжатия 4. На выходе ЛЧМ-фильтра сжатия 4 синтезируемый сигнал сжимается по угловым направлениям до величины ∂l в каждом элементе разрешения по дальности. На выходе формирователя изображения 5 получается изображение объекта на любой дальности в системе углов, по которым осуществлялось сканирование антенной системы.
, согласно формуле (4), и синтезируется сигнал (фаза которого меняется по квадратичному закону), который поступает на вход ЛЧМ-фильтра сжатия 4. На выходе ЛЧМ-фильтра сжатия 4 синтезируемый сигнал сжимается по угловым направлениям до величины ∂l в каждом элементе разрешения по дальности. На выходе формирователя изображения 5 получается изображение объекта на любой дальности в системе углов, по которым осуществлялось сканирование антенной системы.
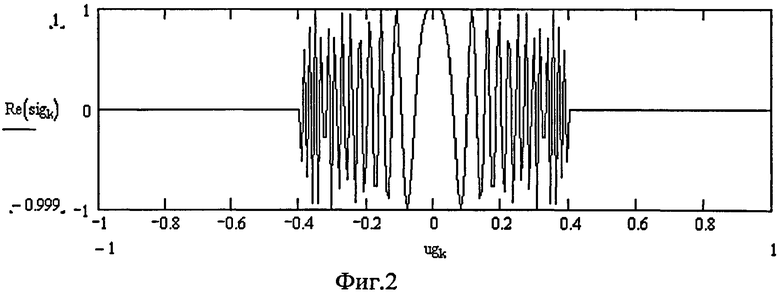
Для проверки приведенных алгоритмов была создана модель синтезированной апертуры при сканировании антенной системы в интервале углов
(ширина луча антенной системы  ), длина волны λ=1 м. Шаг сканирования по углу был выбран равным 2·D, согласно теореме Котельникова.
), длина волны λ=1 м. Шаг сканирования по углу был выбран равным 2·D, согласно теореме Котельникова.
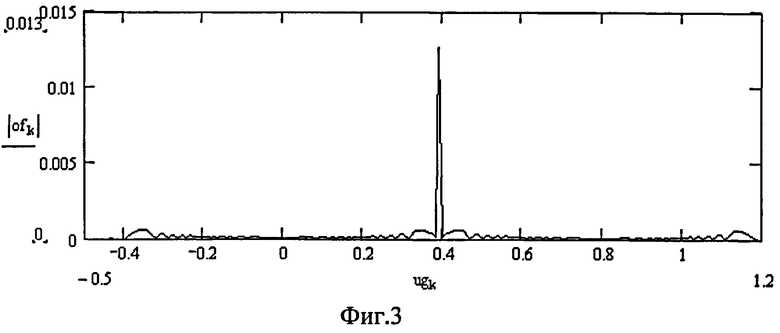
На фиг.2 показан вид синтезированного сигнала при указанных параметрах, который представляет собой ЛЧМ-сигнал с базой D. На фиг.3 показан результат обработки синтезированного сигнала с применением ЛЧМ-фильтра сжатия. Как видно из фиг.3, произошло укорочение синтезированного сигнала в D раз относительно ширины диаграммы направленности реальной антенны.
Таким образом, результаты угловых измерений в пределах ширины антенного луча, преобразованные в область пространственных частот при вращении (сканировании) антенной системы, представляют собой ЛЧМ колебание с полосой ΔFвр.
Согласно формуле (4)
где  и
и  - пространственные частоты в направлениях
- пространственные частоты в направлениях  .
.
Анализ синтезированной диаграммы направленности позволяет определить ряд потенциальных характеристик предлагаемой обработки сигналов при сканировании антенной системы.
В частности, получить по угловой координате сжатый сигнал длительностью
 ,
,
и элемент разрешения по угловой координате
 ,
,
где ν=R·Ω - линейная скорость прохода антенного луча через цель на дальности R.
При сканировании используется весь раскрыв реальной антенны для формирования синтезированной диаграммы направленности и при элемент разрешения по угловому направлению потенциально равен половине реальной апертуры d в соответствующей угловой плоскости:
 .
.
Таким образом, предлагаемые способ разрешения движущихся целей по угловым направлениям в обзорных РЛС, заключающийся в последовательном измерении угловых направлений на цель в пределах ширины луча реальной антенной системы моноимпульсным методом при сканировании ее в заданном секторе обзора за счет вращения или электронно в соответствующей плоскости, последующем синтезе ЛЧМ сигнала пространственных частот, соответствующих измеренным направлениям, и сжатии этого сигнала по угловым направлениям, и устройство, содержащее последовательно соединенные моноимпульсный измеритель угловых направлений на цель в составе последовательно соединенных антенной системы, фильтра и дискриминатора угловых направлений, интерполятор, преобразователь результатов измерения угловых направлений в спектральную область пространственных частот, ЛЧМ-фильтр сжатия и формирователь изображения объекта, позволяют за время прохода луча через цель достичь потенциальной разрешающей способности на всех дальностях, равной половине размера апертуры антенны в соответствующей плоскости.
Список литературы
1. Бартон Д., Вард Г. Справочник по радиолокационным измерениям. М.: «Советское радио», 1976.
2. Радиолокационные станции обзора земли / Под ред. Г.С.Кондратенкова. М.: «Радио и связь», 1983.
3. Антенны и устройства СВЧ / Под ред. Воскресенского. М.: «Радио и связь», 1994.
4. Патент 2337373, 2008.
5. Антипов В.Н. и др. Радиолокационные станции с цифровым синтезированием апертуры антенны. М.: «Радио и связь», 1988.
6. Д.Р.Родс. Введение в моноимпульсную радиолокацию. М.: «Советское радио», 1960.
7. М.И.Финкельштейн. Основы радиолокации. М.: «Советское радио», 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2015 |
|
RU2593595C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК ИЗМЕРЕНИЯ АЗИМУТА НАЗЕМНЫХ ЦЕЛЕЙ С УЧЕТОМ ОТРАЖЕНИЙ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2014 |
|
RU2572843C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
Заявленные способ и устройство относятся к радиолокации и могут быть использованы в обзорных радиолокационных станциях (РЛС) для разрешения целей по угловым направлениям в режимах обзора и сопровождения. Достигаемый технический результат изобретения - получение для обзорных РЛС за время прохода луча через цель потенциальной разрешающей способности по угловым координатам на всех дальностях, равной половине размера апертуры антенны в соответствующей плоскости. Для достижения указанного технического результата используют способ, который заключается в последовательном измерении угловых направлений на цель в пределах ширины луча реальной антенной системы моноимпульсным методом при сканировании ее в заданном секторе обзора за счет вращения или электронно в соответствующей плоскости, последующем синтезе линейно-частотно модулированного (ЛЧМ) сигнала пространственных частот, соответствующих измеренным направлениям, и сжатии этого сигнала по угловым направлениям, и устройство, содержащее последовательно соединенные моноимпульсный измеритель угловых направлений на цель в составе последовательно соединенных антенной системы, фильтра и дискриминатора угловых направлений, интерполятор, преобразователь результатов измерения угловых направлений в спектральную область пространственных частот, ЛЧМ-фильтр сжатия и формирователь изображения объекта. 2 н.п. ф-лы, 3 ил.
1. Способ разрешения движущихся целей по угловым направлениям в обзорных радиолокационных станциях, заключающийся в последовательном измерении угловых направлений на цель в пределах ширины луча реальной антенной системы при сканировании ее в заданном секторе обзора, отличающийся тем, что измерение угловых направлений осуществляют моноимпульсным методом, при этом сканирование антенной системы выполняют за счет вращения или электронно в соответствующей плоскости, затем производят синтез линейно-частотно-модулированного сигнала пространственных частот, соответствующих измеренным направлениям, и сжатие этого сигнала по угловым направлениям на основе корреляционного интеграла-свертки в каждом элементе разрешения по дальности и получают изображение цели на любой дальности в системе угловых направлений, по которым производят сканирование антенной системы.
2. Устройство разрешения движущихся целей по угловым направлениям в обзорных радиолокационных станциях, содержащее последовательно соединенные моноимпульсный измеритель угловых направлений на цель в составе последовательно соединенных антенной системы, фильтра и дискриминатора угловых направлений, интерполятор, преобразователь результатов измерения угловых направлений в спектральную область пространственных частот, фильтр сжатия линейно-частотно-модулированного сигнала и формирователь изображения объекта на любой дальности в системе угловых направлений, по которым производится сканирование.
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| СПОСОБ РАЗРЕШЕНИЯ ЦЕЛЕЙ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СЖАТИЕМ ИМПУЛЬСОВ И ВОССТАНОВЛЕНИЕМ СИГНАЛОВ | 2004 |
|
RU2296345C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| US 7671789 В1, 02.03.2010 | |||
| US 4568940 А, 04.02.1986 | |||
| JP 2009180514 А, 13.09.2009 | |||
| WO 1988005921 А, 11.08.1988. | |||

