Изобретение относится к радиолокации, и может быть использовано в подвижных РЛС, размещенных, например, на корабле, автомобиле и т.п.
При юстировке по радиоизлучению Солнца возникают проблемы, связанные с тем, что Солнце не является точечным источником радиоизлучения. Угловой размер Солнца равен 32 уг.мин. Распределение интенсивности радиоизлучения по диску неравномерно и непостоянно во времени; периодически возникают области повышенного излучения. Время существования таких областей колеблется от одного до 2-3 оборотов Солнца вокруг своей оси (период обращения 28 суток). Появление областей с повышенной интенсивностью радиоизлучения приводит к смещению центра радиоизлучения (РЦ) Солнца относительно геометрического центра (ГЦ), что обуславливает ошибки юстировки величиной до 16 угл. мин, так как РЛС измеряет координаты радиоцентра.
Известный способ юстировки РЛС по радиоизлучению Солнца основан на "Перекидке" антенны.
Способ заключается в следующем.
В течение светового дня при помощи юстируемой РЛС при различных положениях Солнца периодически производят измерение угловых координат Солнца путем приема его радиоизлучения, причем каждый замер производят дважды: для нормального и перекинутого положения антенны ("Перекидка" - поворот по азимуту на 180о и направление в этом положении антенны на цель). За измеренное значение координат принимается среднее от обоих замеров. Затем в качестве эталонных определяют расчетные положения геометрического центра Солнца на моменты измерений по известным формулам. Далее определяют ошибки измерения угловых координат как разность измеренных и эталонных координат.
Недостатком этого способа является то, что он применим только к РЛС, антенна которых допускает "перекидку", что требует определенной конструкции опорно-поворотного устройства (ОПУ). Этот метод позволяет исключить только те ошибки, которые не меняются при перекидке (в системе координат, связанной с антенной). Переменные составляющие ошибок сохраняются и не дают возможности определить смещение радиоцентра Солнца и учесть его при юстировке, что ухудшает точность юстировки.
Известен способ юстировки РЛС по радиоизлучению Солнца, основанный на радиоастрономическом (с высокой разрешающей способностью) наблюдении за Солнцем. Способ позволяет юстировать РЛС с ОПУ любого типа и обеспечивает высокую точность. Способ заключается в следующем: в течение светового дня при различных положениях Солнца с помощью юстируемой РЛС периодически производят измерение угловых координат Солнца путем приема его радиоизлучения. Одновременно с помощью службы Солнца производят измерение смещения радиоцентра Солнца относительно его геометрического центра с учетом формы диаграммы направленности (ДН) юстируемой РЛС. По окончании измерений данные службы Солнца передают на юстируемую РЛС. Затем определяют расчетные положения геометрического центра Солнца на моменты измерений по известным формулам, суммируют их с полученным от службы Солнца смещением радиоцентра, в результате чего получают эталонные координаты Солнца. Далее определяют ошибки измерения угловых координат как разность измеренных и эталонных координат.
Недостатком этого способа является то, что для получения необходимой точности процесс юстировки РЛС и наблюдения службы Солнца должны быть совмещены по времени и частичному диапазону, что требует большой подготовительной работы. После измерений необходимо затратить время на обработку результатов наблюдений службы Солнца и передачу их на РЛС. Таким образом, недостатком способа являются большие затраты времени.
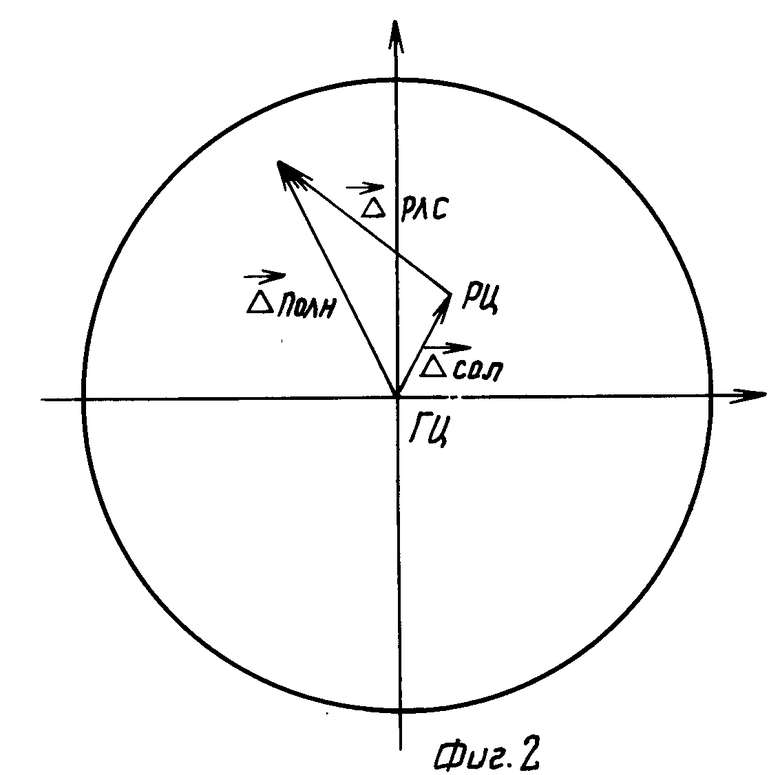
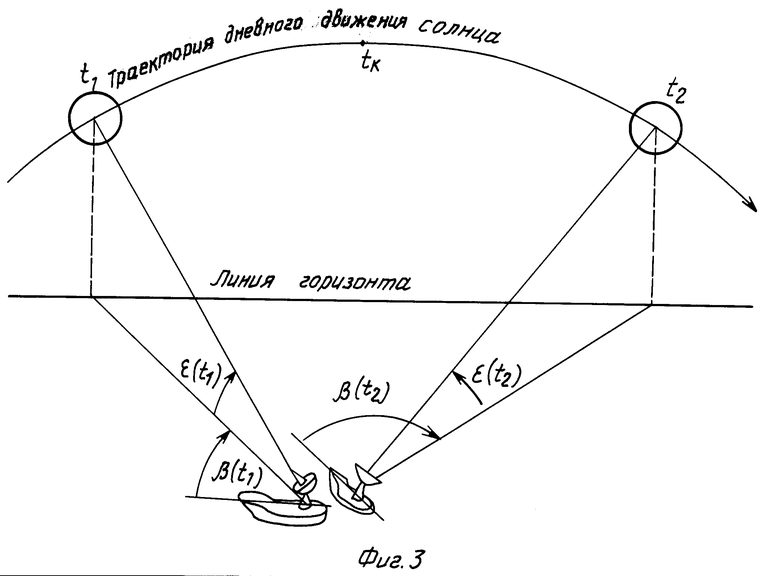
Наиболее близким по технической сущности к заявленному способу, т.е. прототипом, является способ, использующий суточное вращение Земли и основанный на том, что при суточном движении Солнца по небесной сфере видимый с Земли диск Солнца вращается вокруг своего геометрического центра. При этом центр радиоизлучения, смещенный в общем случае от геометрического центра Солнца, описывает вокруг него в картинной плоскости дугу окружности. При юстировке, проводимой в течение нескольких часов (лучше около полудня, когда больше угол места и быстрее вращение диска Солнца), появляется возможность определить модуль и направление вектора смещения радиоцентра Солнца от его геометрического центра в картинной плоскости.
Основанный на этом явлении способ-прототип заключается в следующем: в течение светового дня периодически с помощью юстируемой РЛС производят измерение угловых координат Солнца путем приема его радиоизлучения. На моменты замеров производят расчет этих же координат геометрического центра Солнца по известным формулам. Расчетные координаты принимают в качестве эталонных, так как их ошибки значительно меньше, чем требования к ошибкам РЛС. Далее по каждому замеру определяют полные угловые ошибки как разность измеренных и эталонных координат. Затем определяют смещение радиоцентра Солнца на период измерений путем аппроксимации окружностью зависимости полной шибки от времени в картинной плоскости (радиус полученной окружности равен смещению). После этого получают утонченные значения ошибок, для чего из полученных ранее ошибок вычитают смещение радиоцентра. Уточненные ошибки и являются результатом юстировки.
Описанный способ имеет существенный недостаток, заключающийся в том, что в связи с перемещением Солнца по небесной сфере в ходе юстировки, переменная по рабочей зоне систематическая ошибка РЛС не дает возможности точно выделить смещение радиоцентра Солнца. Последнее складывается с систематическими ошибками РЛС и ухудшает точность юстировки. Поясним это подробнее.
Оценка полно ошибки по угловым координатам, полученная в результате юстировки по Солнцу, является суммой ошибки измерения РЛС и смещения радиоцентра Солнца относительно его геометрического центра: =
=  +
+  (1) где
(1) где  - вектор полной измеренной угловой ошибки РЛС в картинной плоскости;
- вектор полной измеренной угловой ошибки РЛС в картинной плоскости; - вектор смещения радиоцентра Солнца в картинной плоскости;
- вектор смещения радиоцентра Солнца в картинной плоскости; - вектор ошибки измерения РЛС угловых координат Солнца.
- вектор ошибки измерения РЛС угловых координат Солнца.
Ошибки за счет рефракции считаются скомпенсированными с помощью известного аглоритма стандартной рефракции.
Составляющая  и является предметом юстировки, тогда как
и является предметом юстировки, тогда как  - мешающим фактором.
- мешающим фактором.
Для того, чтобы диск Солнца повернулся на достаточный угол, измерения необходимо проводить с интервалом в несколько часов. Так, для средних условий наблюдения: широта точки стояния РЛС - 40оС, склонение Солнца 0о, что соответствует времени весеннего и осеннего солнцестояния, длительность интервала наблюдения, за который диск Солнца поворачивается на 60о, составляет 4 ч. За это время Солнца перемещаются на небесной сфере по азимуту на угол порядка 60о.
Систематическая ошибка РЛС функционально зависит от многих параметров, в том числе от угла места и азимута объекта локации (в нашем случае Солнца). Остальные параметры, такие как рабочая частота, отклонение луча ФАР и др. могут быть сохранены постоянными при юстировке и не вносят переменных ошибок.
Зависимость систематических ошибок от азимута β и угла места ε объекта локации в системе координат, связанной с основанием (носителем) РЛС, обусловлена следующими факторами: упругими деформациями антенны и ОПУ при развороте антенны; неучтенными погрешностями установки осей вращения антенны и ее геометрической оси; влиянием металлических элементов конструкции носителя, расположенных вблизи антенны (для корабельных РЛС надстройки и мачты); влияние радиопрозрачного укрытия.
Выше отмечалось, что при реализации способа-прототипа, углы ε и β изменяются в широких пределах - до величины порядка 60-90о. Это исключает возможность выделить по результатам измерений с нужной точностью ошибку, относящуюся к смещению радиоцентра Солнца, поскольку в уравнении составляющая не является константой. Переменные по рабочей зоне ошибки РЛС будут приписаны эффекту смещения радиоцентра Солнца, что исказит результаты юстировки. Фактически область применения метода-прототипа при сохранении требуемой точности ограничивается двумя редко встречающимися случаями: РЛС уже отъюстирована другими известными способами, и метод-прототип применяется лишь для периодического контроля сохранения отъюстированности РЛС. В этом случае  = 0 и
= 0 и  =
=  , т.е. возможно прямое измерение смещения радиоцентра Солнца; конструкция и условия работы РЛС таковы, что регулярные ошибки по угловым координатам от ε и β не зависят (случай практически неосуществимый), т.е.
, т.е. возможно прямое измерение смещения радиоцентра Солнца; конструкция и условия работы РЛС таковы, что регулярные ошибки по угловым координатам от ε и β не зависят (случай практически неосуществимый), т.е.  = const и окружность, описываемая в течение дня радиоцентром Солнца, при измерениях не искажается, что позволяет выделить ошибку
= const и окружность, описываемая в течение дня радиоцентром Солнца, при измерениях не искажается, что позволяет выделить ошибку  . В остальных случаях, как правило, встречающихся на практике, метод дает недопустимо высокие ошибки.
. В остальных случаях, как правило, встречающихся на практике, метод дает недопустимо высокие ошибки.
Задачей изобретения является повышение точности и оперативности юстировки подвижной РЛС по радиоизлучению Солнца.
Задача достигается тем, что в способ-прототип вводят измерения при двух дневных положениях Солнца, имеющих одинаковый угол места и азимутальный угол в системе координат, связанной с носителем РЛС: ε (t1) = ε (t2), β (t1) = β (t2), причем моменты измерений t1 и t2 выбирают равноотстоящими от момента кульминации Солнца tк так, что tк - t1 = t2 - tк; определяют полные ошибки измерения координат Солнца для каждого i-го замера (( ).), как разность измеренных значений и расчетных координат геометрического центра Солнца на моменты ti, выявляя смещение радиоцентра Солнца относительно его геометрического центра ((
).), как разность измеренных значений и расчетных координат геометрического центра Солнца на моменты ti, выявляя смещение радиоцентра Солнца относительно его геометрического центра (( i)) для каждого i-го замера из условий:
i)) для каждого i-го замера из условий: =
= 
 где Mi и M2 - матрица поворота диска Солнца в момент t2 и tiотносительно t1, кото-рую рассчитывают по известным формулам; и уточняя значения угловых ошибок РЛС путем вычитания смещения радиоцентра Солнца из полной ошибки:
где Mi и M2 - матрица поворота диска Солнца в момент t2 и tiотносительно t1, кото-рую рассчитывают по известным формулам; и уточняя значения угловых ошибок РЛС путем вычитания смещения радиоцентра Солнца из полной ошибки: i=
i=  -
-  i
i
Условие равенства координат Солнца в моменты t1 и t2 выполняется путем соответствующего выбора времени проведения замеров и определенной установкой носителя РЛС.
Техническим результатом применения способа является повышение точности юстировки по сравнению со способом-прототипом, либо уменьшение времени юстировки по сравнению с приведенным аналогом. В обоих случаях эффект достигается без использования дополнительных приборов и инструментов.
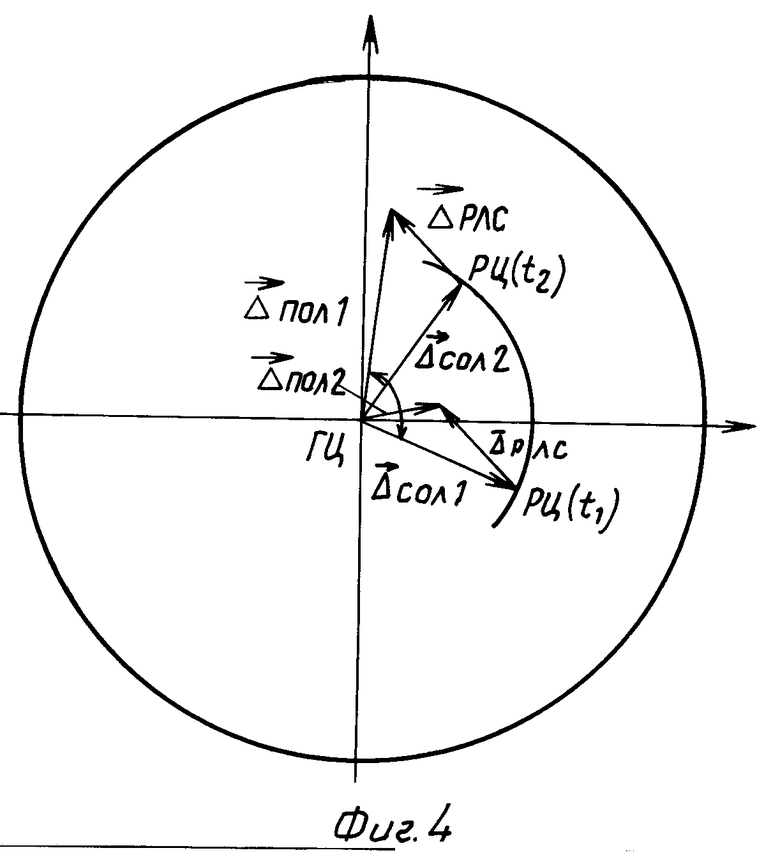
На фиг. 1 изображено изменение положения диска Солнца при его дневном движении; на фиг.2 - составляющие полной ошибки в картинной плоскости; на фиг. 3 - расположение носителя РЛС и Солнца в моменты t1 и t2; на фиг.4 - система уравнений в картинной плоскости.
Предлагаемый способ заключается в следующем.
В течение светового дня периодически в моменты времени t(i) с помощью юстируемой РЛС производят измерение угловых координат Солнца путем приема его радиоизлучения. В числе этих замеров производят и два замера в моменты t1 и t2 так, чтобы Солнце имело одинаковый угол места ε (t1)= ε (t2) и азимут β (t1) = β (t2). Для этого момент t1 выбирается до кульминации (истинного полудня), а момент t2 - после кульминации, причем t1 и t2 равноотстоят от момента кульминации: tк - t1 = t2 - tк, где tк - момент кульминации. При измерениях в моменты t1 и t2 носитель РЛС устанавливается по курсу таким образом, чтобы обеспечивался одинаковый азимутальный угол Солнца относительно продольной горизонталь- ной оси носителя РЛС β (t1) = β (t2) (см. фиг.3).
На моменты замеров t(i) производят расчет координат геометрического центра Солнца по известным формулам. Расчетные координаты принимают в качестве эталонных. Далее по каждому замеру определяют полные угловые ошибки, как разность измеренных и эталонных координат: i=
i=  i+
i+  i
i
Полые ошибки, относящиеся к моментам t1 и t2, раскладывают на составляющие: =
=  +
+ 
 =
=  +
+  где индекс 1 относится к моменту t1, а 2 - к t2 и той же точке рабочей зоны РЛС, т.е. ε (t1) = ε (t2), и все остальные параметры измерений ошибки РЛС одинаковы, то ошибки измерения РЛС в моменты t1 и t2одинаковы:
где индекс 1 относится к моменту t1, а 2 - к t2 и той же точке рабочей зоны РЛС, т.е. ε (t1) = ε (t2), и все остальные параметры измерений ошибки РЛС одинаковы, то ошибки измерения РЛС в моменты t1 и t2одинаковы: =
=  =
= 
За время проведения юстировки (световой день) состояние Солнца не меняется, так как время устойчивого существования солнечных пятен значительно больше. Кроме того, постоянство распределения радиоизлучения по диску Солнца может быть проконтролировано, например, методом корреляции формы измеренных по Солнцу объемных ДН РЛС в моменты t1 и t2.
Таким образом составляют систему уравнений, решая которую, определяют положение радиоцентра Солнца на период юстировки:
 где M =
где M =
 - матрица поворота диска Солнца;
- матрица поворота диска Солнца;
Δα2 - угол поворота диска Солнца.
α1, α2 - угол поворота диска Солнца относительно его положения при кульминации рассчитывается по формуле
tg αi=  где αi - угол поворота диска Солнца относительно момента кульминации;
где αi - угол поворота диска Солнца относительно момента кульминации;
Н - угол поворота Земли относительно момента кульминации.
Φ - широт точки наблюдения;
δ - угол склонения Солнца над экватором.
Система векторных уравнений проиллюстрирована на фиг.4. Решая ее, определяют смещение радиоцентра Солнца на момент t1 - t1-  . Затем определяют вектор смещения радиоцентра для каждого i-го момента времени:
. Затем определяют вектор смещения радиоцентра для каждого i-го момента времени: =
= 

Для каждого замера определяют полную ошибку с учетом смещения радиоцентра Солнца =
=  -
- 
Это и является результатом юстировки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1995 |
|
RU2094816C1 |
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1993 |
|
RU2069867C1 |
| СПОСОБ МОНОИМПУЛЬСНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА | 1992 |
|
RU2033627C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2019 |
|
RU2699552C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2012 |
|
RU2529875C2 |
Использование: в подвижных радилокационных системах (РЛС), на корабле, автомобиле и т.д. Сущность изобретения: измерение производят при двух дневных положениях Солнца, имеющих одинаковый угол места и азимутальный угол в системе координат, связанной с носителем РЛС, причем моменты измерений t1 и t2 выбирают равноотстоящими от момента кульминации Солнца t2 определяют полные ошибки измерения угловых координат Солнца для каждого i-го замера, как разность измеренных значений и расчетных координат геометрического центра Солнца на моменты t1 определяют смещение радиоцентра Солнца относительно его геометрического центра для каждого i-го замера, определяют значение угловых ошибок РЛС путем вычитания смещения радиоцентра Солнца из полной ошибки. 4 ил.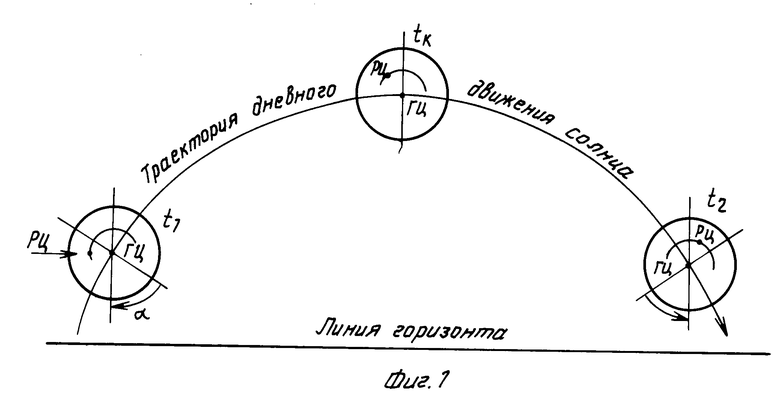
СПОСОБ ЮСТИРОВКИ ПО УГЛОВЫМ КООРДИНАТАМ ПОДВИЖНОГО РАДИОЛОКАТОРА, заключающийся в том, что измеряют угловые координаты Солнца путем приема его радиоизлучения в течение светового дня юстируемым радиолокатором, сравнивают измеренные угловые координаты Солнца с расчетными координатами Солнца с учетом вращения его диска на интервале измерений, отличающийся тем, что на интервале измерений угловых координат Солнца путем приема его радиоизлучения юстируемым радиолокатором после дневной кульминации Солнца в момент времени t2, когда оно имеет угол места относительно радиолокатора, равный углу места в одном из измерений t1, произведенных до кульминации Солнца, и азимутальный угол относительно радиолокатора, равный азимутальному углу, измеренному также в момент t1 до кульминации Солнца, рассчитывают положение геометрического центра Солнца в указанные моменты t1 первого измерения до кульминации Солнца, рассчитывают угол поворота диска Солнца за время между первым и вторым измерениями, определяют смещение радиоцентра Солнца относительно его геометрического центра, определяют угловые ошибки радиолокатора путем вычитания определяемого смещения радиоцентра Солнца из полной ошибки при юстировке, вносимой радиолокатором и смещением радиоцентра относительно его геометрического центра.
| The bell System Technical Journal "The USE of Solar Radio Amission for the Measurement of Radar Ansle Errors". |
