Изобретение относится к электроизмерительной технике и может быть использовано при производстве щитовых приборов магнитоэлектрической системы, в частности в задачах автоматизации контроля погрешности от неуравновешенности.
Известны способы определения погрешности, основанные на регистрации и обработке электрического напряжения, наводимого в рабочей обмотке при определенных воздействиях и наклонах (см. авт.св. N 1328760, кл. G 01 R 3/00, 1987, и авт.св. N 1468204, кл. G 01 R 3/00). Эти способы являются автоматическими и могут использоваться при автоматизированной балансировке магнитоэлектрических приборов для контроля величины неуравновешенности. Однако для задач выходного контроля приборов, когда нужно проверить неуравновешенность после окончательной сборки или после климатических испытаний, способ, предложенный в авт. св. N 1328760, оказывается достаточно сложным, а способ, предложенный в авт.св. N 1468204, может иметь большую погрешность.
Известен способ определения погрешности от неуравновешенности магнитоэлектрического прибора (прототип), заключающийся в том, что устанавливают прибор так, чтобы ось вращения его подвижной части была вертикальна, подают в обмотку прибора ток, отключают его, находят максимальное напряжение, наводимое в обмотке при движении подвижной части в нулевое положение, наклоняют прибор так, чтобы ось вращения подвижной части была горизонтальна, подают в обмотку прибора тот же ток, отключают его, вновь определяют максимальное напряжение, наводимое в обмотке при движении подвижной части в нулевое положение, поворачивают прибор на девяносто градусов вокруг горизонтальной оси, параллельной или совпадающей с осью вращения подвижной части, подают в обмотку прибора тот же ток, отключают его, определяют максимальное напряжение, наводимое в рабочей обмотке при движении подвижной части в нулевое положение, и по трем значениям максимальных напряжений вычисляют максимальную погрешность прибора от неуравновешенности (см. авт.св. N 1468204, кл. G 01 R 3/00, 1990).
Недостатком известного способа определения погрешности от неуравновешенности является неточность, обусловленная влиянием силы тяжести на динамику подвижной части прибора в положении, когда ось вращения подвижной части горизонтальна. Для оценки погрешности от действия силы тяжести рассмотрим уравнения движения подвижной части прибора при вертикальном расположении оси вращения и горизонтальном ее положении. При любом расположении оси вращения максимальное напряжение Eм, наводимое в обмотке при движении подвижной части в нулевое положение после отключения подаваемого в обмотку тока, будет пропорционально максимальной скорости изменения магнитного потока через обмотку подвижной части
Eм= k , (1) где
, (1) где  - максимальная угловая скорость подвижной части;
- максимальная угловая скорость подвижной части;
k коэффициент пропорциональности.
При расположении оси вращения вертикально уравнение движения подвижной части без учета сил сопротивления будет иметь вид
I·  + WΨ 0 (2) где J момент инерции подвижной части относительно оси вращения;
+ WΨ 0 (2) где J момент инерции подвижной части относительно оси вращения;
W удельный противодействующий момент пружин или растяжек;
Ψ текущий угол поворота подвижной части.
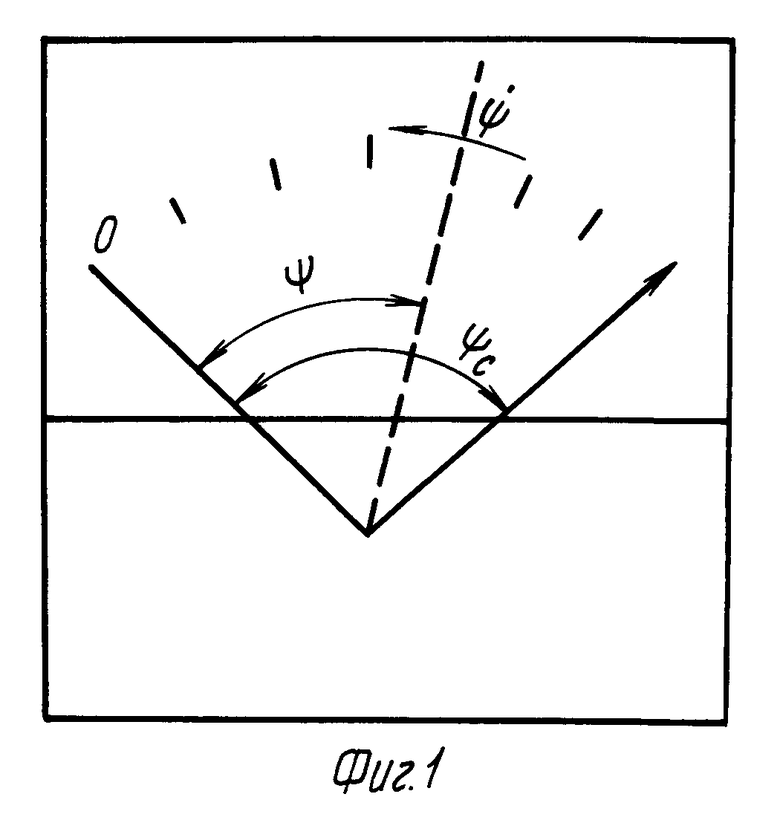
Движение стрелки с установившегося угла Ψс в нулевое положение под действием момента упругости при вертикальном расположении оси вращения подвижной части поясняется фиг. 1. При достижении Ψ0 скорость  будет максимальной
будет максимальной  . Интегрируя уравнение (2) при движении от Ψ c до 0, имеем:
. Интегрируя уравнение (2) при движении от Ψ c до 0, имеем:
I·  dΨ W
dΨ W  dΨ, (3)
dΨ, (3) =
=  · Ψс (4)
· Ψс (4)
Подставляя (4) в (1), получим
Eм= k·  ·Ψс (5)
·Ψс (5)
При горизонтальном расположении оси вращения (см. фиг. 2) на подвижную часть прибора действует момент, равный произведению составляющей силы тяжести  на плечо
на плечо  проекции вектора эксцентриситета на плоскость, перпендикулярную оси вращения подвижной части. Угол между стрелкой и проекцией вектора эксцентриситета
проекции вектора эксцентриситета на плоскость, перпендикулярную оси вращения подвижной части. Угол между стрелкой и проекцией вектора эксцентриситета  остается неизменным при движении подвижной части, поэтому угол поворота вектора
остается неизменным при движении подвижной части, поэтому угол поворота вектора  равен углу поворота Ψc (см. фиг. 2). Уравнение движения подвижной части в случае горизонтального расположения оси вращения имеет вид
равен углу поворота Ψc (см. фиг. 2). Уравнение движения подвижной части в случае горизонтального расположения оси вращения имеет вид
I + RΨ + WΨ P′·eп= P·eп·cos(α+(Ψс-Ψ), (6) где h коэффициент демпфирования;
+ RΨ + WΨ P′·eп= P·eп·cos(α+(Ψс-Ψ), (6) где h коэффициент демпфирования;
α угол, который образует вектор  с горизонтальной осью при Ψ=Ψc;
с горизонтальной осью при Ψ=Ψc;
Р величина силы тяжести, приложенной к концу вектора  . Считая h=0 и интегрируя (6) аналогично (3) при движении от Ψc до 0, получим максимальную скорость
. Считая h=0 и интегрируя (6) аналогично (3) при движении от Ψc до 0, получим максимальную скорость  с учетом действия момента силы тяжести:
с учетом действия момента силы тяжести: =
=  (7)
(7)
Подставляя (7) в (1), получим
E k
k (8)
(8)
В приведенном выше способе (прототипе) допускалось, что максимальное напряжение Ем, наводимое в обмотке при движении подвижной части в нулевое положение, определяется выражением (5) как при вертикальном, так и при горизонтальном расположении оси вращения. Однако при горизонтальном расположении имеется погрешность, относительную величину которой можно определить
δ  (9)
(9)
Откуда, используя (5) и (8), находим
δ 1  (10)
(10)
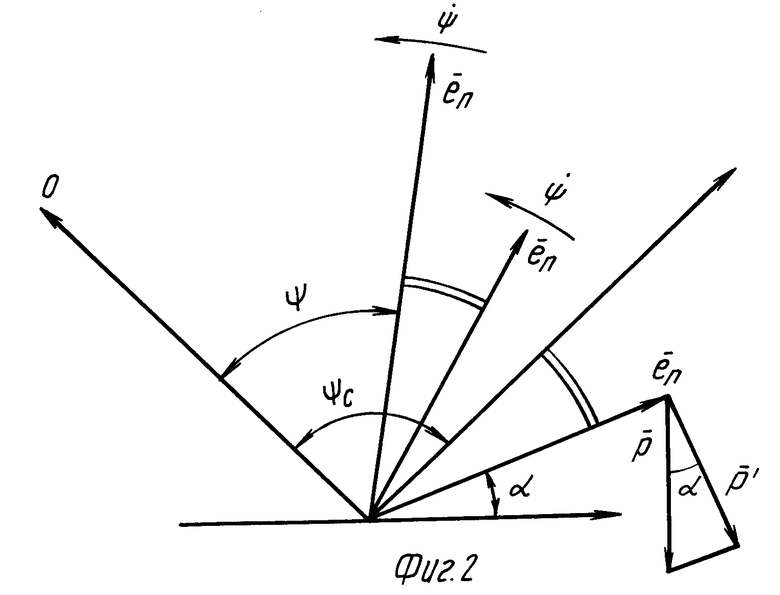
Из (10) нетрудно установить, что влияние неуравновешенности максимально, когда α= -0,5Ψс или-0,5Ψс + π В первом случае (см. фиг. 3), где изображены траектории центра тяжести при движении подвижной части с угла Ψс до 0, момент силы тяжести затормаживает движение и уменьшает скорость  , а во втором разгоняет подвижную часть и увеличивает скорость. В обоих случаях момент силы тяжести находится в окрестности своего максимума, наступающего при α= 0 или α= π Расчеты показывают, что при движении подвижной части с установившегося угла Ψc0,5π при неблагоприятном расположении вектора
, а во втором разгоняет подвижную часть и увеличивает скорость. В обоих случаях момент силы тяжести находится в окрестности своего максимума, наступающего при α= 0 или α= π Расчеты показывают, что при движении подвижной части с установившегося угла Ψc0,5π при неблагоприятном расположении вектора  относительно горизонтальной оси под углом α -0,5Ψс или α-0,5 Ψс+ π относительная методическая погрешность может значительно превышать класс точности прибора.
относительно горизонтальной оси под углом α -0,5Ψс или α-0,5 Ψс+ π относительная методическая погрешность может значительно превышать класс точности прибора.
К недостаткам способа (прототипа) можно отнести также сложность, обусловленную необходимостью поворота прибора из положения, когда ось вращения подвижной части вертикальна, в положение, когда эта ось горизонтальна, затем поворота вокруг горизонтальной оси, параллельной или совпадающей с осью вращения подвижной части. Сложность вызвана тем, что первоначально требуется установка оси вращения подвижной части в строго вертикальном положении, и тем, что два последовательных поворота прибора вокруг взаимно перпендикулярных осей осуществляются двумя устройствами вращения.
Целью изобретения является повышение точности и упрощение способа определения погрешности от неуравновешенности магнитоэлектрического прибора.
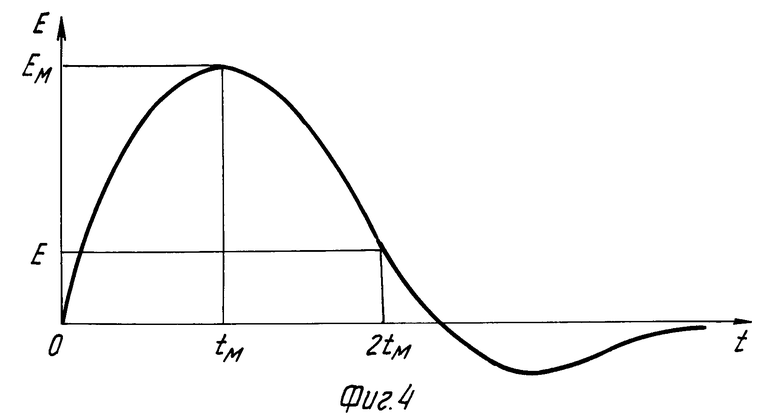
Цель достигается тем, что устанавливают прибор так, чтобы ось вращения подвижной части была горизонтальна, подают на прибор входной ток, отклоняя при этом подвижную часть на заданный угол Ψcотключают входной ток и регистрируют максимальное значение Ем1 в момент времени t1 и значение Е1 в момент времени 2t1 переходного напряжения, возникающего в обмотке при движении подвижной части в нулевое положение, поворачивают прибор на девяносто градусов вокруг горизонтальной оси поворота, параллельной или совпадающей с осью вращения подвижной части, регистрируют максимальное значение Ем2 переходного напряжения в обмотке после отключения тока, поворачивают прибор вокруг той же оси и в том же направлении на девяносто градусов, регистрируют максимальное значение Ем3 в момент времени t3 и значение Е3 в момент времени 2t3переходного напряжения в обмотке после отключения тока, причем во всех трех положениях прибора подают на обмотку входной ток Ic, соответствующий повороту подвижной части на максимальный угол Ψсшкалы прибора, по измеренным значениям Е ,Е
,Е ,Е
,Е ,Е1,Е3 определяют погрешность от неуравновешенности по формуле
,Е1,Е3 определяют погрешность от неуравновешенности по формуле
γ  · 100 (11)
· 100 (11)
где
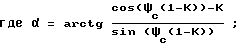
α arctg  , K=
, K=  .
.
Предлагаемый способ обладает существенными отличиями, так как для повышения точности измерения погрешности от неуравновешенности и исключения погрешности от влияния силы тяжести из переходного процесса напряжения, наводимого в обмотке при движении подвижной части в нулевое положение, в двух из трех операций измеряются дополнительно значения переходного напряжения в момент времени, вдвое больший времени достижения максимального значения, кроме того, измерения проводятся при горизонтальном положении оси вращения подвижной части, которая не меняет своего направления в пространстве, что позволяет упростить реализацию способа. Таким образом, введение измерения значения в дополнительной точке в двух из трех операций и замена одной нестандартной операции на однотипную позволяет увеличить точность и упростить измерение погрешности от неуравновешенности.
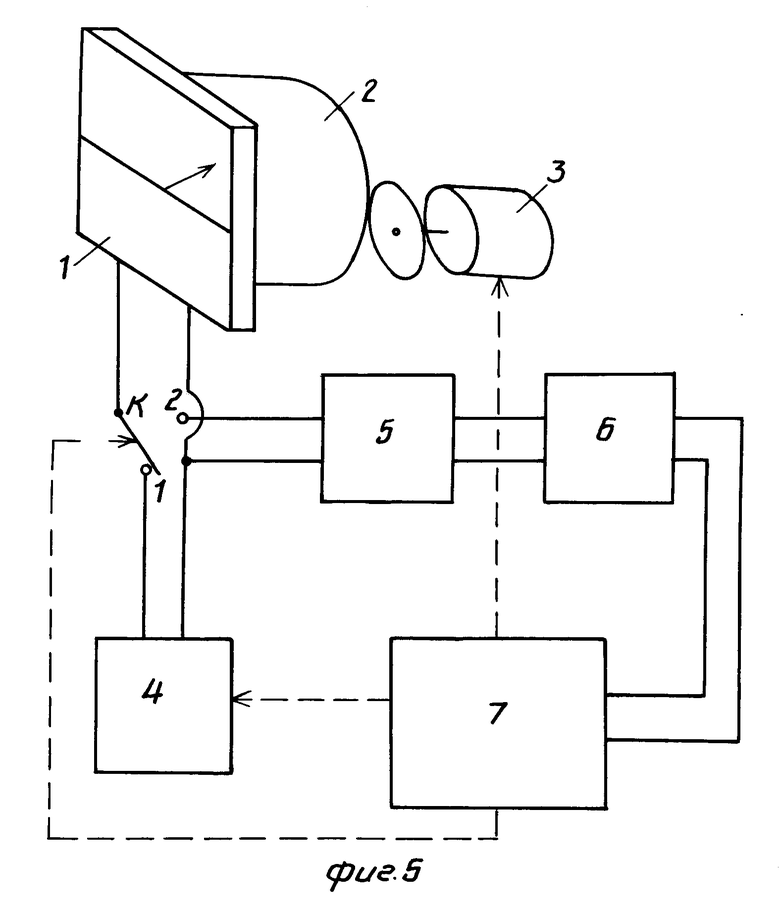
Сущность предлагаемого способа определения максимальной погрешности от неуравновешенности магнитоэлектрического прибора поясняется фиг. 4, 5, где на фиг. 4 изображен переходный процесс напряжения; на фиг. 5 схематично изображено устройство для реализации предлагаемого способа.
Суть предлагаемого способа заключается в следующем.
Устанавливают прибор так, чтобы ось вращения подвижной части была горизонтальна, и подают на него входной ток Ic, соответствующий максимальному углу отклонения Ψс стрелки при отсутствии момента силы тяжести. После установления колебаний подвижная часть под действием вращающего момента от тока Ic и момента силы тяжести  повернется на угол Ψс + ΔΨ1 Приращение ΔΨ1 угла ввиду его малости может быть найдено (см. фиг. 2) так:
повернется на угол Ψс + ΔΨ1 Приращение ΔΨ1 угла ввиду его малости может быть найдено (см. фиг. 2) так: 

 · cosα, (12) где Р вес подвижной части;
· cosα, (12) где Р вес подвижной части;
eп величина эксцентриситета.
Рl проекция силы тяжести;
W удельный противодействующий момент растяжек или пружин.
После этого отключают ток Ic и измеряют из переходного процесса напряжения, наводимого в рабочей обмотке при движении подвижной части из положения Ψс + +ΔΨ1 в нулевое положение, максимальное значениеЕм1 и значение Е1 в момент времени, вдвое больший времени достижения Ем1. Далее поворачивают прибор на девяносто градусов вокруг горизонтальной оси, параллельной или совпадающей с осью вращения подвижной части, и повторяют операцию получения максимального напряжения Ем2, используя тот же ток Ic. Аналогично (12):
ΔΨ2≈  · cos(α+π/2) (13)
· cos(α+π/2) (13)
После этого поворачивают прибор в ту же сторону вокруг той же оси на девяносто градусов, подают в обмотку тот же ток Ic, после чего повторяют операцию измерения из переходного процесса напряжения, наводимого в рабочей обмотке при движении подвижной части с угла Ψс + ΔΨ3 в нулевое положение, максимального значения Ем3 и значения Е3 в момент времени, вдвое больший времени достижения максимального напряжения Ем3,
ΔΨ3≈  · cos(α+π) (14)
· cos(α+π) (14)
Во всех трех операциях измерения напряжения максимума Ем и напряжения Е переходный процесс напряжения определяется скоростью  движения подвижной части (см. (6)). Нелинейное дифференциальное уравнение (6) не поддается аналитическому решению. Для его решения использовался метод Рунге-Кутта для дифференциального уравнения второго порядка. Используя решение (6) для трех операций с учетом (12)-(14), методом имитационного моделирования на ЭВМ получена формула для точного вычисления максимальной относительной погрешности от неуравновешенности γ
движения подвижной части (см. (6)). Нелинейное дифференциальное уравнение (6) не поддается аналитическому решению. Для его решения использовался метод Рунге-Кутта для дифференциального уравнения второго порядка. Используя решение (6) для трех операций с учетом (12)-(14), методом имитационного моделирования на ЭВМ получена формула для точного вычисления максимальной относительной погрешности от неуравновешенности γ  · 100 где используются измеренные значения Ем1, Ем2, Ем3, Е1, Е3:
· 100 где используются измеренные значения Ем1, Ем2, Ем3, Е1, Е3:
γ  · 100 где α arctg
· 100 где α arctg  , K=
, K=  .
.
Устройство для реализации предлагаемого способа (см. фиг. 5) содержит контролируемый прибор 1, установленный в поворотном стакане 2, который кинематически соединен с шаговым двигателем 3 поворота, например типа ШД2-64. Контролируемый прибор через ключ К, представляющий собой, например, трехпозиционное реле типа РП или РПС, электрически соединен с источником 4 входного сигнала, представляющим собой, например, кодоуправляемый калибратор тока или напряжения типа П320 и П321, и с масштабным усилителем 5, выход которого соединен с входом аналого-цифрового преобразователя 6, который связан с блоком 7 вычислителя погрешности, ее регистрации и управления работой устройства. В качестве блока 7 может быть использована микроЭВМ типа ДВК-2М с соответствующими периферийными устройствами, обеспечивающими регистрацию вычислений погрешности, ввод программы управления и сопряжения по каналу измерительной информации с преобразователем 6 и по каналам управления с источником 4 входного сигнала, двигателем 3 и ключом К. На фиг. 5 каналы управления показаны штриховыми линиями.
Способ определения максимальной погрешности магнитоэлектрического прибора от неуравновешенности осуществляют следующим образом. В поворотный стакан 2 устанавливают прибор 1 так, чтобы ось вращения его подвижной части была горизонтальна. По команде "Пуск" с блока 7 на выходе источника 4 устанавливают ток Ic, соответствующий максимальному углу Ψс отклонения стрелки. После установления показаний, через 3-4 с, блок 7 переводит ключ К в положение "2" и подключает обмотку прибора к входу усилителя 5, который усиливает напряжение, возникающее в обмотке прибора при движении подвижной части в нулевое положение. Это напряжение преобразуется аналого-цифровым преобразователем 6 в код и последовательно через определенный шаг по времени передается для запоминания в блок 7. После этого блок 7 переводит ключ К в нейтральное положение и выдает на шаговый двигатель 3 управляющие импульсы, количество которых таково, что двигатель осуществляет поворот стакана 2 вместе с прибором 1 на девяносто градусов. Далее блок 7 осуществляет запись точек переходного процесса. Затем блок 7 повторяет поворот прибора в том же направлении и процедуру измерения и записи переходного процесса. После этого блок 7 определяет максимальные значения Ем1,Ем2,Ем3 переходных процессов напряжения и моменты t1, t3 достижения этих значений, затем находит значения Е1, Е3 из переходных процессов в моменты времени 2t1, 2t3 и по определенным значениям Ем1, Ем2, Ем3, Е1, Е3находит максимальную относительную погрешность от неуравновешенности по формуле (11).
Проведенные испытания показали, что предлагаемый способ обладает более высокой точностью. Его целесообразно использовать в автоматизации выходного контроля магнитоэлектрических приборов.
Использование: при производстве щитовых приборов магнитоэлектрической системы для автоматизации контроля погрешности от неуравновешенности. Сущность изобретения: при трех положениях прибора в вертикальной плоскости определяют значения напряжений в двух точках переходного процесса, наводимого в обмотке прибора при свободном движении подвижной части. По ним вычисляют погрешность от неуравновешенности. 5 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ МАГНИТОЭЛЕКТРИЧЕСКОГО ПРИБОРА ОТ НЕУРАВНОВЕШЕННОСТИ, включающий установку прибора в положение, при котором ось вращения подвижной части горизонтальна, подачу в обмотку прибора тока, отключение тока и определение максимального напряжения, наводимого в обмотке прибора при движении подвижной части в нулевое положение, поворот прибора вокруг горизонтальной оси, коллинеарной оси вращения подвижной части прибора, на 90o и повторное определение максимального напряжения, наводимого в обмотке прибора при отключении тока той же величины, отличающийся тем, что после установки прибора в положение, при котором ось вращения подвижной части горизонтальна, подачи и отключения тока и определения максимального напряжения, наводимого в обмотке прибора при движении подвижной части в нулевое положение, определяют значение напряжения в обмотке прибора по окончании интервала времени, вдвое большего времени достижения максимального значения напряжения, а после поворота прибора на 90o и повторного определения максимального напряжения, наводимого в обмотке прибора при отключении тока, вновь поворачивают прибор вокруг той же оси и в том же направлении на 90o подают в обмотку прибора ток той же величины и определяют максимальное значение напряжения, наводимое в обмотке при движении подвижной части в нулевое положение, и значение напряжения по окончании интервала времени, вдвое большего времени достижения максимального значения, а максимальную относительную погрешность γ прибора от неуравновешенности определяют по формуле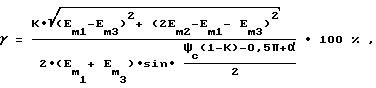

Ψc угол шкалы прибора;
Eм1, Eм2, Eм3 максимальные значения напряжений, наводимых в обмотке прибора при движении подвижной части в нулевое положение, соответственно в первом, втором и третьем положениях;
E1, E3 значения напряжений, наводимых в обмотке прибора при движении подвижной части в нулевое положение по окончании интервала времени, вдвое большего времени достижения максимальных значений Eм1 и Eм3 соответственно.
| Авторское свидетельство СССР N 1468204, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
