Изобретение относится к электроизмерительной технике и может быть использовано при производстве щитовых приборов магнитоэлектрической системы в частности, для автоматизации контроля погрешности от неуравновешенности, возникшей при наклонах прибора.
Цель изобретения - повьш1ение точности способа определения погрешности магнитоэлектрического прибора от неуравновешенности за счет исключения методической погрешности.
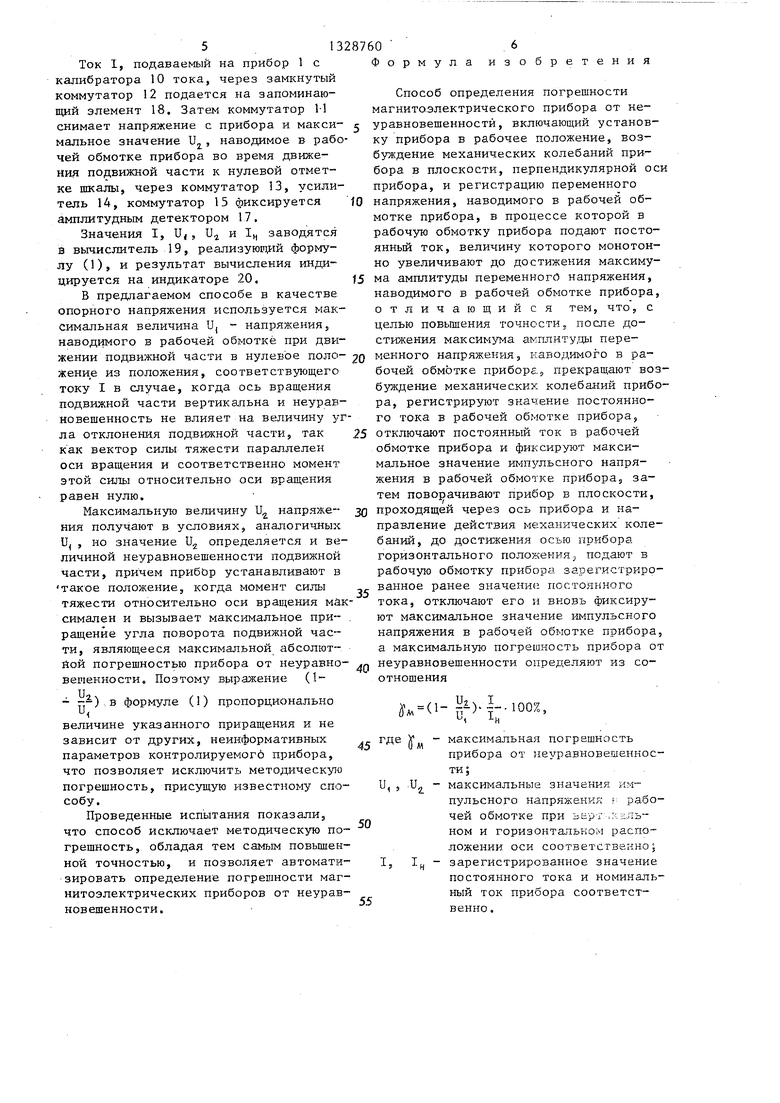
На фиг. 1 иллюстрируется процесс
20
25
30
определения погрешности от неуравнове- электрического прибора от неуравно- шенности показаны исходное положение прибора, когда ось вращения его подвижной части вертикальна, т.е. параллельна оси Z (а), положение прибора при формировании импульсного напряжения и,, когда вектор эксцентриситета е перпендикулярен линии действия меха- нических колебаний с ускорением а и параллелен оси последующего поворота на 90°, положение прибора для формирования напряжения U, когда ось вращения подвижной части горизонтальна и лежит в плоскости параллельной плоскости ХУ, т.е. параллельна вектору ускорения а(Ь); на фиг. 2 - блок-схема устройства для реализации предлагаемого способа.
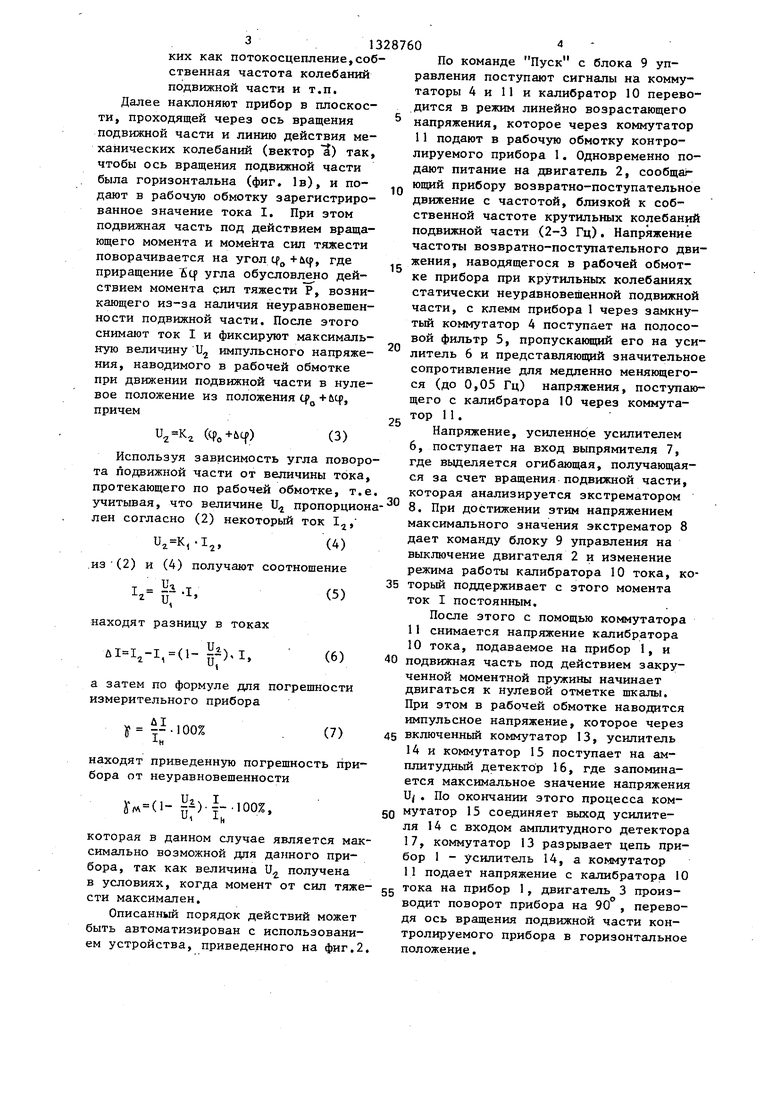
Устройство для реализации способа содержит контролируемый прибор 1, кинематически связанньй с двигателем 2, сообщающим ему возвратно-поступа- тельное движение, и двигателем 3, служащим дпя поворота прибора на 90, схему определения максимума сигнала, включающую в себя коммутатор 4, связывающий входные клеммы прибора 1 с фильтром 5, усилитель 6, выпрямитель 7 и экстрематор 8, соединенные последовательно, блок 9 управления, выполненный в виде генератора импульсов, схему поворота подвижной части вокруг оси вращения, состоящую из управляемого блоком 9 калибратора 10 .тока, например, типа П320, связанного через коммутатор 11 с клеммами прибора 1, блок определения максимальных амплитуд U, и Ug напряжений, наводимых в рабочей обмотке после выключения тока I, в который входят коммутаторы 12 и 13, подключенные к клеммам прибора 1, усилитель 14, связанный по входу с коммутатором 13, а по выходу через коммутатор 15 - с амплитудным детекторами 16 и 17, запоминающий элевешенности Х определяют следующим образом.
Прибор 1 (фиг. 1 а) устанавливают так, чтобы ось вращения его подвижно части бьша вертикальна. Сообщают при бору 1 возвратно-поступательные колебания в горизонтальной плоскости в направлении вектора механических ускорений а (фиг. 16). Подачей в рабочую обмотку прибора 1 линейно возрастающего по величине тока осуществля ют плавный поворот подвижной части вокруг оси вращения (фиг. 16, показа но ст.релкой) . Одновременно контроли руют характер изменения и величину наводимого в рабочей обмотке переменного напряжения, пропорциональног проекции вектора е эксцентриситета подвижной части на оси X.
Фиксируют момент достижения пере35 менным напряжением в рабочей обмотке прибора 1 максимального значения (что соответствует взаимной перпенди кулярности векторов а и е), после чего прекращают поворот подвижной части вокруг оси ее вращения фиксацией тока I, останавливают возвратно-пост пательные колебания прибора 1, запоминают значение тока I, снимают его с рабочей обмотки прибора 1 и изме45 ряют максимальную величину импульсно го напряжения U( , наводимого в рабочей обмот ке при движении подвижной части в нулевое положение из положе- -ния, соответствующего току I (углу поворота подвижной части равному
40
50
55
срд). При этом величина U i;p гпорцио нальна углу tf, отклонения подззижной части от нулевого положения, соответствующего току Ij
и, К,-1,(2)
где К - коэффициент, зависящий от
конструктивно-технологических параметров прибора, тамент 18, соединенный с.выходом коммутатора 12, вычислитель 19, к входу которого подключены выходы детекторов 16 и 17 и элемента 18, а выход соединен с индикатором 20 погрешности.
Вычислитель 19 реализует вычисление по формуле
10
а м(1- |).f-100%,
г
(1)
где 1ц - номинальный ток прибора. Максимальную погрешность магнито0
5
0
электрического прибора от неуравно-
вешенности Х определяют следующим образом.
Прибор 1 (фиг. 1 а) устанавливают так, чтобы ось вращения его подвижной части бьша вертикальна. Сообщают прибору 1 возвратно-поступательные колебания в горизонтальной плоскости в направлении вектора механических ускорений а (фиг. 16). Подачей в рабочую обмотку прибора 1 линейно возрастающего по величине тока осуществляют плавный поворот подвижной части вокруг оси вращения (фиг. 16, показано ст.релкой) . Одновременно контролируют характер изменения и величину наводимого в рабочей обмотке переменного напряжения, пропорционального проекции вектора е эксцентриситета подвижной части на оси X.
Фиксируют момент достижения пере5 менным напряжением в рабочей обмотке прибора 1 максимального значения (что соответствует взаимной перпендикулярности векторов а и е), после чего прекращают поворот подвижной части вокруг оси ее вращения фиксацией тока I, останавливают возвратно-поступательные колебания прибора 1, запоминают значение тока I, снимают его с рабочей обмотки прибора 1 и изме5 ряют максимальную величину импульсного напряжения U( , наводимого в рабочей обмот ке при движении подвижной части в нулевое положение из положе- -ния, соответствующего току I (углу поворота подвижной части равному
0
0
5
срд). При этом величина U i;p гпорцио- нальна углу tf, отклонения подззижной части от нулевого положения, соответствующего току Ij
и, К,-1,(2)
где К - коэффициент, зависящий от
конструктивно-технологических параметров прибора, та
31
ких как потокосцепление,собственная частота колебаний подвижной части и т.п. Далее наклоняют прибор в плоскости, проходящей через ось вращения подвижной части и линию действия механических колебаний (вектор ) так, чтобы ось вращения подвижной части была горизонтальна (фиг. 1в), и подают в рабочую обмотку зарегистрированное значение тока I. При этом подвижная часть под действием вращающего момента и момента сил тяжести поворачивается на угол , где приращение IScf угла обусловлено действием момента сил тяжести Р, возникающего из-за наличия неуравновещен- ности подвижной части. После этого снимают ток I и фиксируют максимальную величину U импульсного напряжения, наводимого в рабочей обмотке при движении подвижной части в нулевое положение из положения Ц д + ucf, причем
(CPo+UCf)
(3)
Используя зависимость угла поворота подвижной части от величины тока, протекающего по рабочей обмотке, т.е.
-30
учитывая, что величине Ш пропордиона- 8. При достижении этим напряжением
лен согласно (2) некоторый ток I
,
Ч
(4)
.из (2) и (4) получают соотнощение I,
Уа и.
(5)
находят разницу в токах
ul
и,
I,-I,(1-),I,
(6)
а затем по формуле дпя погрещности измерительного прибора
у .100%
(7)
находят приведенную погрещность прибора от неуравновещенности
iSV (l- J{)-f ЮОХ,
Ui J-h
которая в данном случае является максимально возможной для данного прибора, так как величина U получена в условиях, когда момент от сил тяжести максимален.
Описанный порядок действий может быть автоматизирован с использованием устройства, приведенного на фиг.2.
10
15
0
25
30
По команде Пуск с блока 9 управления поступают сигналы на коммутаторы 4 и 11 и калибратор 10 переводится в режим линейно возрастающего напряжения, которое через коммутатор 11 подают в рабочую обмотку контролируемого прибора 1. Одновременно подают питание на двигатель 2, сообщаг ющий прибору возвратно-поступательное движение с частотой, близкой к собственной частоте крутильных колебаний подвижной части (2-3 Гц). Напряжение частоты возвратно-поступательного движения, наводящегося в рабочей обмотке прибора при крутильных колебаниях статически неуравновешенной подвижной части, с клемм прибора 1 через замкнутый коммутатор 4 поступает на полосовой фильтр 5, пропускающий его на усилитель 6 и представляющий значительное сопротивление для медленно меняющегося (до 0,05 Гц) напряжения, поступающего с калибратора 10 через коммутатор 11.
Напряжение, усиленное усилителем 6, поступает на вход выпрямителя 7, где выделяется огибающая, получающаяся за счет вращения-подвижной части, которая анализируется экстрематором
8. При достижении этим напряжением
8
ке2.
максимального значения зкстрематор дает команду блоку 9 управления на выключение двигателя 2 и изменение режима работы калибратора 10 тока, ко- 35 торый поддерживает с зтого момента ток I постоянным.
После этого с помощью коммутатора 11 снимается напряжение калибратора
10тока, подаваемое на прибор 1, и 40 подвижная часть под действием закрученной моментной пружины начинает двигаться к нулевой отметке щкалы. При этом в рабочей обмотке наводится импульсное напряжение, которое через
45 включенный коммутатор 13, усилитель 14 и коммутатор 15 поступает на амплитудный детектор 16, где запоминается максимальное значение напряжения и. По окончании этого процесса ком5Q мутатор 15 соединяет выход усилителя 14 с входом амплитудного детектора 17, коммутатор 13 разрывает цепь прибор 1 - усилитель 14, а коммутатор
11подает напряжение с калибратора 10 eg тока на прибор 1, двигатель 3 производит поворот прибора на 90 , переводя ось вращения подвижной части контролируемого прибора в горизонтальное положение.
513
Ток I, подаваемый на прибор 1с калибратора 10 тока, через замкнутый коммутатор 12 подается на запоминающий элемент 18. Затем коммутатор М снимает напряжение с прибора и макси-
мальное значение U, наводимое в рабочей обмотке прибора во время движения подвижной части к нулевой отметке шкалы, через коммутатор 13, усилитель 14, коммутатор 15 фиксируется амплитудным детектором 17,
Значения I, U,, U и 1 заводятся в вычислитель 19, реализующий формулу (1), и результат вычисления индицируется на индикаторе 20.
В предлагаемом способе в качестве опорного напряжения используется максимальная величина Uj - напряжения, наводрдаого в рабочей обмотке при дви
жении подвижной части в нулевое поло- уд менного напряжения, наводимого в ражение из положения, соответствующего току I в случае, когда ось вращения подвижной части вертикальна и неуравновешенность не влияет на величину угла отклонения подвижной части.,, так как вектор силы тяжести параллелен оси вращения и соответственно момент этой силы относительно оси вращения равен нулю.
Максимальную величину U напряжения получают в условиях, аналогичных
и
(
но значение U,, определяется и величиной неуравновешенности подвижной части, причем прибор устанавливают в такое положение, когда момент силы тяжести относительно оси вращения максимален и вызывает максимальное при- ращение угла поворота подвижной части, являющееся максимальной абсолшт- йой погрешностью прибора от неуравновешенности. Поэтому выражение (1- г,-) в формуле (1) пропорционально
J величине указанного приращения и не
зависит от других, неинформативных параметров контролируемогб прибора, что позволяет исключить методическую погрешность, присущую известному способу.
Проведенные испытания показали, что способ исключает методическую погрешность, обладая тем самым повьшген- ной точностью, и позволяет автоматизировать определение погрешности магнитоэлектрических приборов от неуравновешенности.
6
3 о
бретения
Способ определения погрешности магнито-электрического прибора от неуравновешенности, включающий установку прибора в рабочее положение, возбуждение механических колебаний прибора в плоскости, перпендикулярной оси прибора, и регистрацию переменного
напряжения, наводимого в рабочей обмотке прибора, в процессе которой в рабочую обмотку прибора подают посто- янньш ток, величину которого монотонно увеличивают до достижения максимума амплитуды переменного напряжения, наводимого в рабочей обмотке прибора, отличающий ся тем, что, с целью повьшения точности, после достижения максимума амплитуда перебочей обмотке приборс.5 прекращают воз- бзждение механических колебаний прибора, регистрируют значение постоянного тока в рабочей обмотке прибора,
отключают постоянный ток в рабочей обмотке прибора и фиксируют максиальное значение импульсного напряения в рабочей обмотке прибораj затем поворачивают прибор в плоскости,
проходящей через ось прибора и направление действия м€1ханических колебаний, до достижения осью прибора горизонтального положения; подают в рабочую обмотку прибора зарегистрированное ранее значение постоянного тока, отключают его и вновь фиксируют максимальное значение импульсного напряжения в рабочей обмотке прибора, а максимальную погрешность прибора от неуравновешенности определяют из соотношения
м (1- р)- --100%, н
да (Гм
1 S
максимальная погрешность прибора от неуравновешенности;. и - максимальные значения импульсного напряжения г- рабочей обмотке при ьерг .Кельном и горизонталь юм расположении оси соответственно; 1, If, - зарегистрированное значение постоянного тока и номинальный ток прибора соответственно .
X
X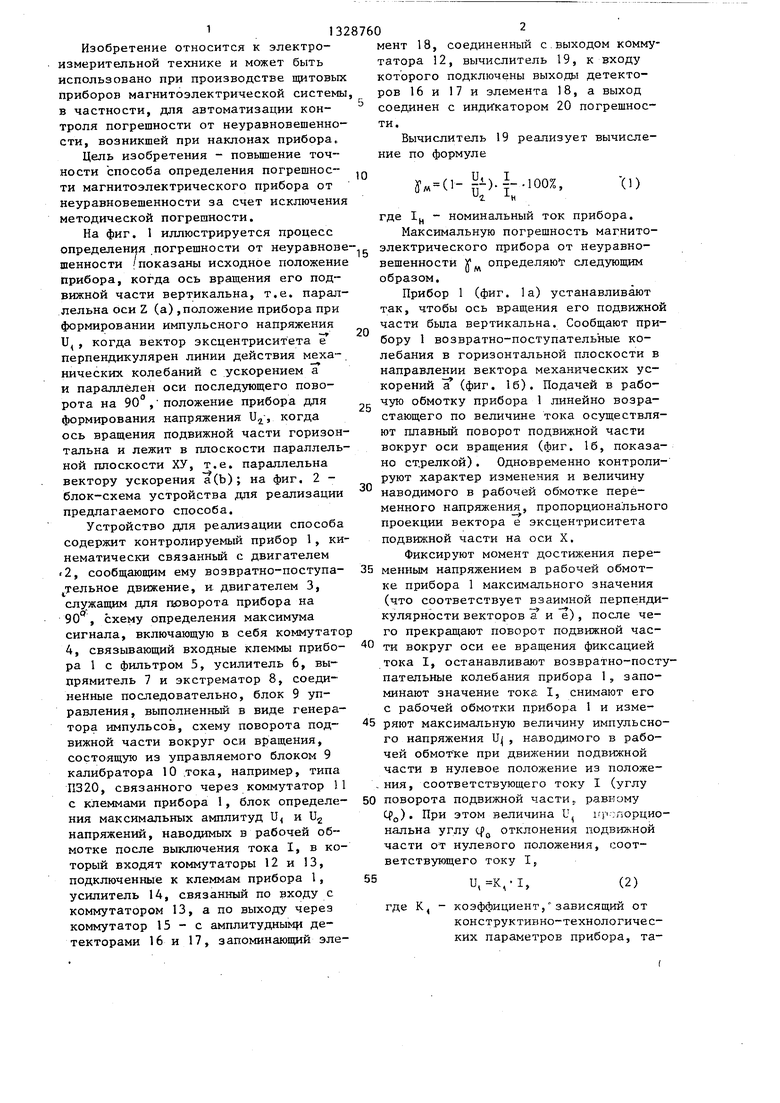
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ МАГНИТОЭЛЕКТРИЧЕСКОГО ПРИБОРА ОТ НЕУРАВНОВЕШЕННОСТИ | 1992 |
|
RU2035741C1 |
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
| Устройство для статической балансировки подвижной части прибора | 1984 |
|
SU1216691A1 |
| Подвижная система магнитоэлектрического прибора | 1986 |
|
SU1347020A1 |
| Способ определения переброса указателя и времени установления показаний магнитоэлектрических приборов | 1988 |
|
SU1499301A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Способ определения градуировочной характеристики магнитоэлектрического измерительного механизма | 1985 |
|
SU1298701A1 |
| Устройство для геологоразведки | 1979 |
|
SU807190A1 |
| Способ определения веса закрепленной в керновых опорах подвижной части электроизмерительного прибора | 1983 |
|
SU1109649A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
Способ определения погрешности магнитоэлектрического прибора (П) от неуравновешенности осуществляют следующим образом: возбуждают механические колебания П в плоскости, перпендикулярной его оси, регистрируют возникшее переменное напряжение в рабочей обмотке П, одновременно подают постоянный ток (ПТ), увеличивая монотонно его величину до достижения максимума амплитуды.переменного напряжения, прекращают возбуждение механических колебаний П, регистрируют значение ПТ I, отключают его и фиксируют максимальное значение импульсного напряжения и, затем поворачивают П в плоскости, проходящей через его ось, и возбуждают механические колебания П в горизонтальной плоскости, подают зарегистрированное ранее значение ПТ в обмотку П, отключают и фиксируют максимальное значение импульсного напряжения и. Максимальную погрешность П от неуравновешенности у„ определяют по формуле y ( ) 1/1 100%, где Ij, - номинальный ток П.Способ имеет повьш1енную точность .за счет исключения методической погрешности. 2 ил. 2 (Л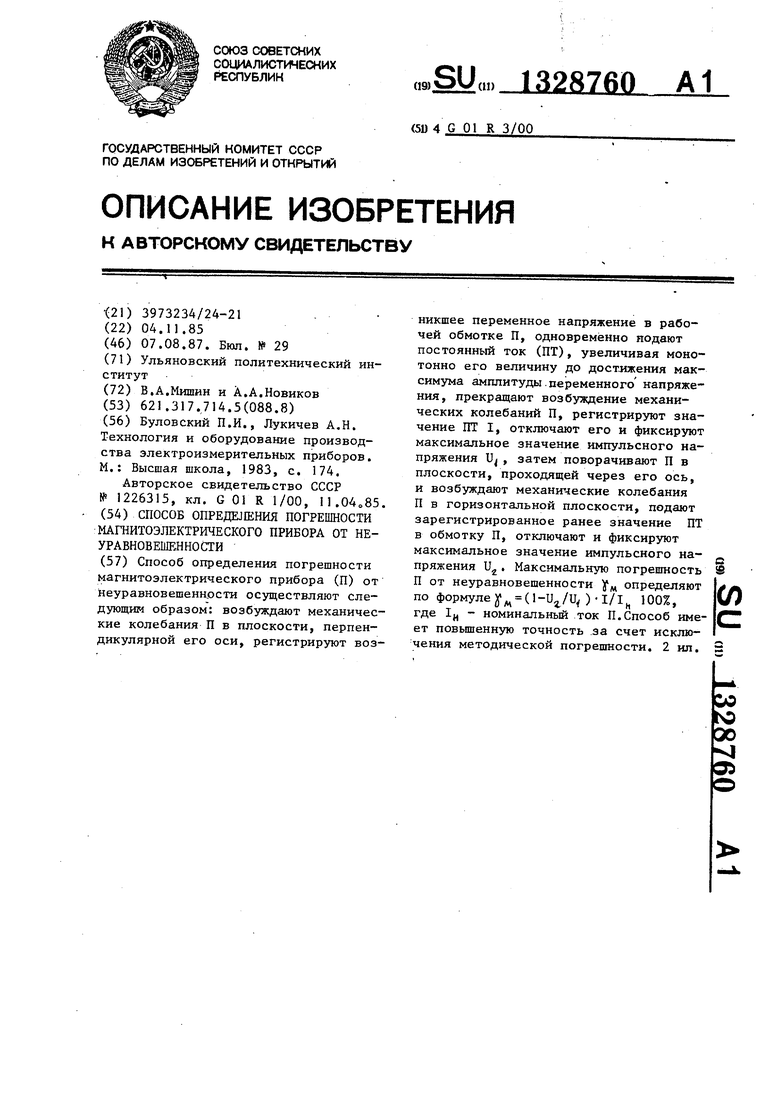
о %
г
S Фи.1
Составитель С.Шумилишская Редактор П.Гереши Техред М.Ходанич
3480/48
Тираж 730Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор С.Шекмар
| Буловский П.И., Лукичев А,Н | |||
| Технология и оборудование производства электроизмерительных приборов | |||
| М.: Высшая школа, 1983, с | |||
| Способ прикрепления барашков к рогулькам мокрых ватеров | 1922 |
|
SU174A1 |
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
