1 Изобретение относится к электро измерительной технике и предназначено для использования при оценке качества электроизмерительных приборов с креплением подвижной части в керновых опорах по критериям в виде коэффициента устойчивости показаний, теоретического коэффициента электромеханической добротности, коэффициентов доброкачественности подвижной части и опор измерительного механизма. Известен способ определения вес подвижной части электроизмерительного прибора, предусматривающий взвешивание ее отдельных составных элементов до сборки и суммирования результатов взвешивания ЕОНедостатком этого способа является значительное отклонение полученного таким образом веса от реального значения в собранном приборе. Это отклонение обусловлено, в частности, свойствами исходных материалов, технологией изготовления прибора, уровнем культуры производства, качеством сборочных операций и т.д. Наиболее близким по технической сущности к изобретению является способ определения массы закреплен ной в керновых опорах подвижной части электроизмерительного прибора, заключающийся в фиксации значения ее тока трогания, вычислении момента М-.р через произведение тока трогания на потокосцепление и использовании для расчета искомого веса Р выражения М,,41 где |U и 6 - соответственно коэффициент трения материала опор и допускаемое нап жение С2. Недостатком известного способа является невысокая точность, поско ку в данном случае приходится ориентироваться на приближенные значе ния /U. и и. Целью изобретения является повышение точности определения массы подвижной части готового прибора. Поставленная цель достигается тем, что согласно способу определе ния массы закрепленной в керновых 92 опорах подвижной части электроизмерительного прибора, основанному на фиксации значения ее тока Л трогания, на подвижной части закрепляют без нарушения симметрии добавочный груз в виде липкого пластичного материала с известной массой ДР, проводят балансировку подвижной части в поперечной плоскости путем местных смещений добавочного груза, фиксируют новое значение тока Jj трогания, а искомую массу Р определяют в соответствии с выражением L(3i/Ji)23 -1) Добавочный груз разделяют на две равные части и закрепляют на одном из корнедержателей, в случае расположения поперечной оси подвижной части в вертикальной плоскости, являющемся верхним. Кроме того, массу ЛР добавочного груза выбирают равной 20-30% от номинальной массы подвижной части. На чертеже-схематично представлен механизм контролируемого электроизмерительного прибора. Электроизмерительный прибор содержит рамку 1 с закрепленными на ней с помощью кернодержателей 2 кернами 3 и стрелочным указателем 4 и доба :очный груз 5. .Способ осуществляют следующим образом. .... -. .г Запитывают прибор от источника постоянного тока, плавно увеличивая величину тока Д возбуждения, подаваемого в рамку 1. До тех пор, пока создаваемый током 3 вращаюо(ий момент М gp ФЭ { где Ф - потокосцепление рабочей обмотки) имеет величину, меньшую момента М р трения, подвижная часть с весом Р наход«тся в неподвижном состоянии. В момент, когда М р превысит М, подвижная часть трогается с места, устанавливается, например, с помощью осциллографа, подключенного к клеммам контролируемого прибора, по возникновению броска ЭДС наводимой при трогании в рабочей обмотке прибора. Ток 3 трогания фиксируется посредством микроамперметра, включенного в цепь питания рабочей обмотки. Далее снижают ток практически до нуля и изменяют вес подвижной части закреплением на ней без нарушения симметрии предварительно взвешенного добавочного груза 5 в виде мелкого пластичного материала, например строительной мастики.
Добавочный груз 5 с весом лР закрепляют на верхней стороне рамки 1 непосредственно на кернодержателе 2. Так как керн 3 не позволяет закрепить груз 5 в центре рамки 1 на оси вращения, то груз разделяют на два шарика по возможности равной массы и закрепляют по разные стороны и симметрично относительно оси вращения рамки. После этого с помощью местных смещений и деформаций добавочного груза 5 проводят балансировку подвижной части в поперечной плоскости, что необходимо для устранения влияния на результат измерений дебаланса- подвижной части и аналогично D определяют значение тока Л трогания при весе Р + /аР подвижной части.
Для расчета искомого веса Р подвижной части прибора используют известное соотношение .(1) которое записывают дважды с учетом того, что в момент трогания М .р М ер
{ т О ii - Т-, J и,ч I f
0,41 : (Р + ЛР) . (3)
Решение указанной системы позволяет в конечном счете получить раскрытое вьфажение (2) для определения веса Р.
1096494
В результате экспериментальных исследований, которые проводились путем сравнения вычисленного веса Р с весом той же подвижной час5 ти, полученным при последующей разборке и взвешивании, установлено, что для получения максимальной точности необходимо выбирать вес 4Р добавочного груза 5 равньм 20-30%
10 от номинального веса подвижной части. При меньшем йР оказывается малой чувствительность, сильнее сказываются перекосы, а при больших ЛР проявляется нелинейность характерис15 тик.
Предлагаемый способ может быть использован для случая расположения поперечной оси рс1мки 1 в горизонтальной плоскости, так как осново2Q полагающее выражение (1) является справедливым для любого положения оси рамки 1. Однако случай с вертикальной осью представляется самьгм сложным, поскольку при нecи мeтpии
25 добавочных грузов 5 возникает перекос кернов 3 в подпятниках и появляется значительная погрешность. При горизонтальной оси несимметрия грузов 5 вызывает лишь некоторое
2Q закручивание спиральных моментных пружин, что практически не приводит к погрешности измерения.
Повьш1енная точность определения веса подвижной части, учитывающая технологию изготовления, а также
35 качество технологических и сборочных операций позволяют производить Ьолее точную оценку качества электроизмерительных приборов в целом.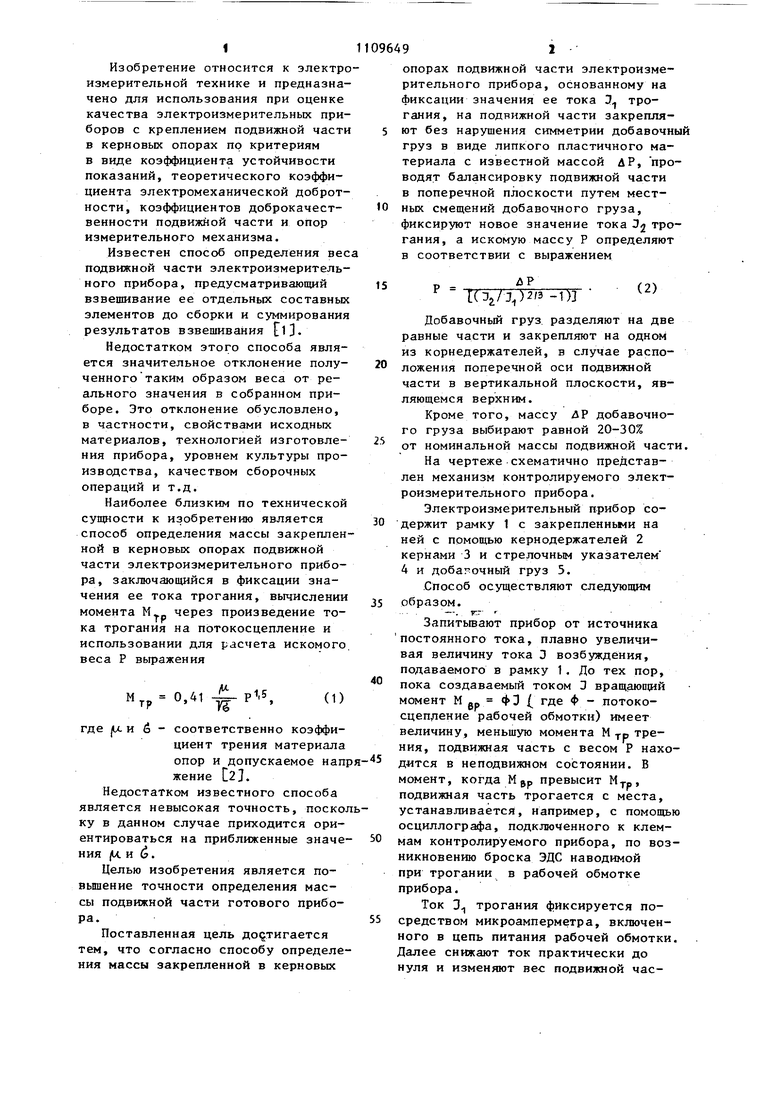
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров подвижной части на растяжках магнитоэлектрического прибора | 1990 |
|
SU1780021A1 |
| Устройство для измерения осевого зазора в опорах | 1980 |
|
SU934193A1 |
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
| Стенд для балансировки подвижной части электроизмерительного прибора | 1983 |
|
SU1142743A1 |
| Способ регулировки величины осевого зазора в керновой опоре стрелочного указателя электроизмерительных приборов | 1980 |
|
SU957004A1 |
| Способ определения массогабаритных характеристик электроизмерительного прибора | 1987 |
|
SU1492292A1 |
| Электроизмерительный прибор | 1975 |
|
SU752168A1 |
| Способ бесконтактного определения зазора в верхней керновой опоре прибора | 1989 |
|
SU1652800A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АНИЗОТРОПИИ ПРОНИЦАЕМОСТИ ПЛАСТА В ЛАБОРАТОРНЫХ УСЛОВИЯХ | 2009 |
|
RU2407889C1 |
| СПОСОБ УПРОЧНЕНИЯ ОПОРНОЙ ПОВЕРХНОСТИ КРАТЕРА ПОДПЯТНИКА | 1996 |
|
RU2117302C1 |
1. CnOCO s ОПРЕДЕЛЕРШЯ МАССЫ .ЗАКРЕПЛЕННОЙ В КЕРНОВЫХ ОПОРАХ ПОДВИЖНОЙ ЧАСТИ ЭЛЕКТРОИЗМЕРИТЕЛЬНОГО ПРИБОРА, основанный на фиксации значения ее тока 3 трогания, о т л и чающийся тем, что, с целью повьшения точности, на подвижной части закрепляют без нарушения симметрии добавочный груз в виде липкого пластичного материала с известной массой йР , проводят балансировку подвижной части в поперечной плоскости путем местных смещений добавочного груза, фиксируют новое значение тока J трогания, а искомую массу Р определяют в соответствии с выражением ДР Р 1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пятин Ю.М | |||
| Проектирование элементов измерительных приборов | |||
| М., Высшая школа, 1977, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Усатин П.Б | |||
| Критерий механических свойств опор измерительного прибора | |||
| - В кн.: Теплоэнергетические приборы и регуляторы, вып | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| М., Машгиз, 1956 (прототип), | |||
