Изобретение относится к балансировочной технике и может быть ис пользовано для статической балансировки подвижных систем электроизме- рительных приборов.
Цель изобретения повышение на- деяшости устройства и точности ба- лаГ ЗсировкИз
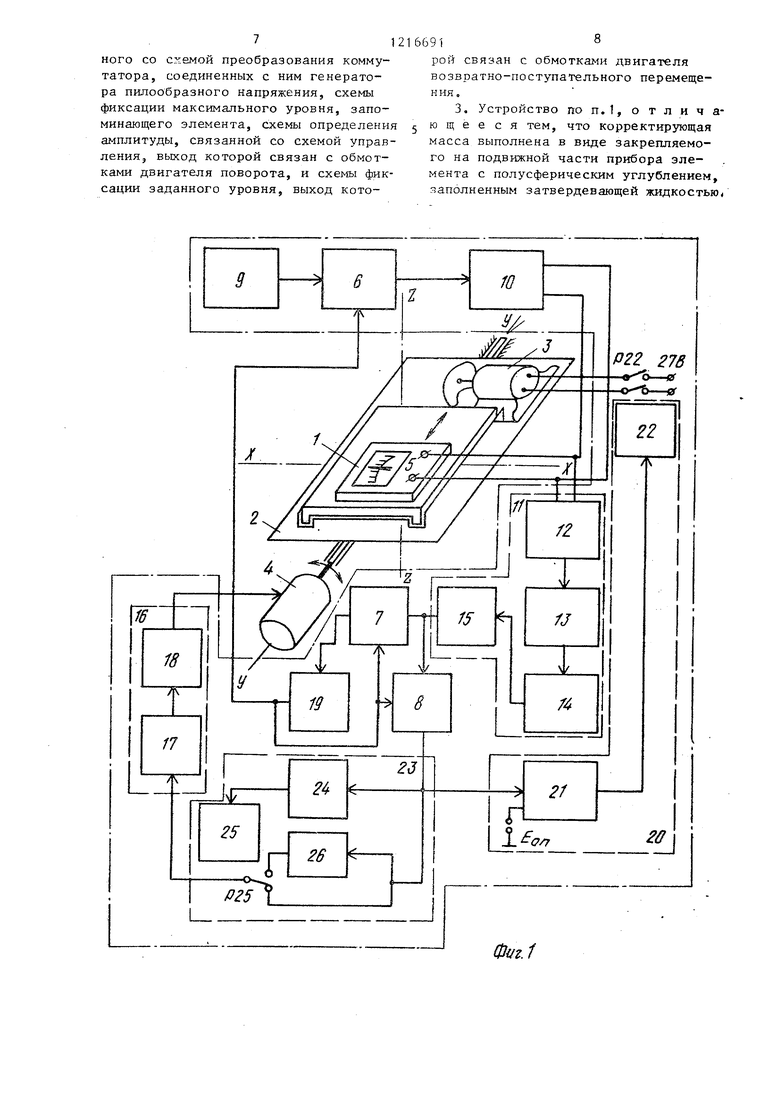
На фиг„1 приведена, электромеханическая схема устройства для статической балансировки подвшкной части прибора; на фиг,2 - подвижная часть и схема, балансировки.
Устройство для статической балансировки подвижной ча..сти прибора 1 , используемого в качестве датчика дисбалансйэ содержит платформу 2, на которой закрепляется прибор 1 , двигатель З, также установленный на апатформе 2 и сообщающий прибору 1 возвратно-поступательные перемещени
дв.нгатель
осуществляющий поворот
платформы 2 в плоскости, перпендикулярной направлению возвратно-поступтельных перемещений5 блок 5 измере- П1Я дисбаланса, выполненный в виде коммутатора, содержащего электронные ключи , генератора 9 пилообразного напряжения, выход которог связан с входом ключа 6, запоминающего элемента 10, вход котс рого связан с вы.ходом ключа 6, а выход - .с входными клеммами прибора 1, схемы 11 преобразования, содержащей последовательно соединенные фильтр 12 верхних частот, вход которого связан с клеммами прибора 1, усилитель 13 постоянного тока, фильтр 14 низких частот и выпрямитель 15, выход которого связан с входами ключей 7 и 8, схемы 16 управления,, содержащей преобразователь 17 и усилител 18, выход которого связан е, обмоткой управлеи.ия двигателя 4 поворота, схемы 19 фиксации макс1-1мального уровня, вход которой связан с выходом ключа 7 3 а выход - с управляю- Е( входами ключей 6-8, схемы 20 фиксации заданного уровня, содержащей компаратор 21, связаннрлй через реле 22 с обмоткой возбуждения двигателя 3 возвратно-поступательного перемеще.нип, и схемы 23 определения амплитуды,, содержаще.й схему 24 определения характера изменения напряжения, реле 25 и инвентор 2Ь вход которого связан с выходом ключа 8 и входом г. 24 опредапения характера изменения напряжения, которая
25
30
35
40
50
с помощью реле 25 осуществляет подключение входа схемы 16 к выходу ключа В или выходу инвертора 26, и корректирующую массу, выполненную в закрепляемого на подвижной части соосно со стрелкой с помощью уса 2.7 элемента 28 с полусферическим углублением, заполненным затвер- дев.шощей ш-здкостью 29,
Устройство работает следующим образом.
Прибор 1 с помощью зажима закрепляется на специальном кронштейне, установленном в имеюпщхся на платформе 2 направляющих. При подаче постоянного напряжения, равного 27 В., через реле 22, имеющее нор- ма.льно замкнутые контакты, в обмотку возбуждения двигателя 3 двигатель через редуктор и кулачок сообщает кронштейну с прибором поступательные колебания в направлении оси У-У. При этом в рабочей обмотке 30 подвижной части прибора 1 магнитоэлектрической системы, расположенной в рабочем зазоре постоянного магнита, наводится переменное электрическое напряжение с амплитудой, пропорциональной проекции статического эксцентриситета ОС на осьХ -X. Эксцентриситет ОСд лежашдй в любой из поперечных плоскостей, перпендикулярных оси Z-Z поворота подвижной части, определяет ее статическую неуравновешенность (на фиг,2 эксцентриситет ОС показан в плоскости, совпадающей с верхней стороной рамки подвижной частиц О - центр жесткости подвижной части, совпадающей с геометрическим центром и точкой крепления растяжек 315 С - проекция центра масс подвиясной части на поперечную плоскость) t.
Наводимое в рабочей обмотке прибора 1 напряжение снимается с выходных 1сп;емм и поступает в схему 1 1 преобразования. Одновременно с включением двигателя 3, сообщающего прибору возвратно-поступательное движение, коммутатор замыкает ключи 6 и 7 (ключ 8 в начальнь й момент разомкнут) „ Через замкнутый к.гцоч б к клеммам прибора 1 одновременно со схемой 11 преобразования подключается пара.,плельно через запоминающий элемент 10 генератор 9 пилообразного (линейного нарастающего) напряжения. Плавно увеличивающийся сигнал генефатора 9, подаваемый в рабочую
3
обмотку, вызывает плавный поворот подвижной части 30 прибора 1 вокруг оси Z-Z ( на фиг,2 показан по часовой стрелке), При повороте происходит измерение проекции эксцентриситета ОС на ось X Х, определяющей амплитуду наводимого в рабочей обмотк сигнала. При совпадении ОС с осью Х-Х амплитуда сигнала в рабочей обмотке максимальна. Для фиксации это го момента достижения максимума служит схема 19 фиксации максимума, выполненная на базе экстрематора, в кторую сигнал, снимаемый с рабочей обмотки прибора 1, поступает после прохождения обработки в схеме 11 преобразования через замкнутый ключ
7.При срабатывании в момент достижния сигналом максимума экстрематор, принцип действия которого основан
на дифференцировании поступающего сигнала, через коммутатор размыкает ключ 6, отключая генератор 9, а также замыкает ключ 7 и размыкает ключ
8.При этом в прибор 1 подается заполненное на элементе 10 значение напряжения генератора 9, соответствующее максимальному сигналу с прибора 1, за счет чего подвижная часть остается в повернутом .вокруг оси Z-Z положении.
Фильтр 12 верхних частот не пропускает в схему 11 преобразования подаваемый на клеммы прибора 1 пилообразный сигнал с генератора 9, фильтр 14 низких частот срезает индуцируемые в рабочей оЬмотке прибора паразитные напряжения высших частот, обусловленные возб гждением собственных колебаний элементов подвижной части с высшими co6cTjeH- ными частотами - стрелочного указателя, моментных пружин и т.п. Таким образом, на выпрямитель 15 пропускается только рабочий сигнал с амплитудой, пропорциональной проекции эксцентриситета ОС на ось -X. Наибольшая чувствительность достигается при выборе частоты этого сиг нала и соответственно частоты воз -; вратно-поступательного движения платформы 2, регулируемой подбором передаточного отношения редуктора двигателя 3, близкой к собственной частоте крутильных колебаний подвижной части вокруг оси Z-Z (для приборов известных типов эта частота лежит в пределах 1-3 Гц), Выпрямитель 15 преобразует переменный
сигнал в постоянный, упрощающий функционирование схем 19 и 24.
После размыкания ключа 7 и замыкания ключа 8 сигнал с прибора 1 5 поступает через ключ 8 в схему 23 определения амплитуды, и через преобразователь 17 и усилитель 18 - в обмотку управления двигателя 4 поворота, осуществляющего плавный
10 поворот платформы 2 вместе с прибором 1 в плоскости, перпендикулярной направлению возвратно-поступательных перемещений (Y-Y). При этом Схмещение затвердевающей жидкости
15 29 в углублении элемента 28 происходит вдоль оси Х-Х. Так как предварительно подвижная часть уже повернута так, что вектор ОС эксцентриситета совпадает с осью Х-Х, то
20 одновременно со смещением балансй-ро- вочного груза проекция центра масс (точка с) смещается вдоль оси Х-Х. Точка С совпадает с точкой О, т.е. проекция эксцентриситета ОС на ось 25 - становится равной нулю только в том случае, если наклон платформы относительно оси У-У происходит в сторону (как показано стрелкой на фиг. 2), в противном случае ..
30 дисбаланс,будет, наоборот, возрас тать. Для зтой цели в устройстве использована схема 24 определения характера изменения напряжения, выполненная на базе экстрематора напряжения, позволяющего по знаку первой производной определить, возрастает или уменьшается сигнал во времени. Реле 23 находится в нормальном замкнутом положении, при этом двигатель 4 поворачивает платформу 2 в определенную сторону вокруг оси У-У. В случае, если экстрематор в схеме 24 фиксирует -уменьшение сигнала (знак производной отрицателен), процесс уравновешивания идет правильно, точка С приближается к О, т.е.эксцентриситет ОС уменьшается и, следовательно, уменьшается амплитуда сигнала, наводимого в рабочей обмотке, В этом случае, .сигнал С прибора
- 1 через ключ 8 и нормально замкнутое реле 25 продолжает поступать на двигатель 4, который поворачивает плат- форму до полного устранения дисбаланса. В случае, если поворот платфор5 мы 2 происходит не в нужную сторону, эксцентриситет ОС увеличивается, соответственно увеличивается снимаемый с прибора и подаваемый на экс5
0
трематор схемы 24 сигнал (знак производной положительный). При этом схема 2А переключает реле 25 в верхнее (фиг,1) положение, и сигнал с прибора подается через ключ 8 на двигател 4 через инвертор 26 напряжения, который изменяет полярность сигнала и соответственно направление поворота двигателя 4. Одновременно сигнал С ключа 8 поступает на схему 20 фиксации заданного, соответствующего допустимой реуравновешенности, уровня снимаемого с прибора сигнала, выполненную в виде компаратора 21, соединенного с источником опорного напряжения Е . Напряжение источника , выбирается расчетным путем и определяется точностью балансировки При равенстве и снимаемого с прибора сигнала компаратор 21 срабатывает, реле -22 через управляющую обмотку размыкается, двигатель 3, возбуждающий колебания прибора, выключается, и на этом процесс балансировки заканчивается. Далее прибор остается в наклонном положении до застывания жидкого балансировочного груза 29 в полусферическом угх1убл8- нии элемента 28 в смещенном положении,
В качестве жидкого балансировочного груза в устройстве может быть использована фотополимеризующая. ко м позиция ЭСДП-5 на основе эпоксидной смолы ЭД-20. Для затвердевания композиция освещается рефлектором, при этом полное затвердевание происходи .за 2-3 мин,
В качестве генератора 9 используется генератор типа Гб-28, запоминающий элемент 10 выполнен на базе операционного усилителя с емкостью на выходе, У фильтра 12 высоких частот частота среза f р. 3 Гц. В качестве усилителя 13 используется усилитель постоянного тока с коэффициентом усиления 7000. Выпрямитель 15 - двухполупериодный на базе операционного усилителя. Двигатель 3 для возбуждения колебаний типа ДП-11 постоянного тока с номинальным числом оборотов 7500 об/мин. Двигатель 4 наклона типа РД-09 двухфазный асинхронньш. Инвертор 26 вы- полнен на базе эмиттерного повторите ля, Иреобразонягель 17 марки ВПМ-2 выполнен в виде электромагнитного
0
Г)
0
5
(1
5
0
контакта, периодически размыкающего и замыкающего цепь с частотой 50 Гц.
Компаратор 21, выполненный на базе операционного усилителя без обратной связи, позволяет фиксиро- вать максимум с точностью до 1% в диапазоне частот 0,03 - 1000 Гц,
Устройство для статической балансировки подвижной части прибора обладает повьшенной надежностью и позволяет повысить точность балансировки. Это обусловлено главным образом исключением специальных датчиков фиксации неуравновешенности, которые понижают точность балансировки и снижают надежность устройства. Роль датчика дисбаланса в устройстве выполняет сам прибор, имеюощй очень высокую точность и позволяющий исключить специальные подвесы для закрепления подвижной час- ти, также снижающие точность и надежность .
Формула .изобретения
1.Устройство дпя статической балансировки подвижной части прибора, содержащее привод, состоящий из двух двигателей, один из которых служит для сообщения прибору возвратно- поступательного перемещения, а другой - для поворота прибора, систему подвески, блок измерения дисбаланса, включающий датчик дисбаланса
и связанные с ним схемы преобразования и управления приводом, и механизм устранения дисбаланса, о т л и- ч ающе е с я тем, что, с целью повышения надежности устройства и точности балансировки, привод выполнен в виде платформы, предназначенной для установки прибора, и сообщающего ему возвратно-поступательное перемещение двигателя, платформа установлена с возможностью разворота в перпендикулярной возвратно-поступательным перемещениям п.лоскости с помощью двигателя поворота, в качестве датчика дисбаланса и системы подвески используют прибор в собранном виде, а механизм устранения дисбаланса выполнен в виде размещенной на подвижной части прибора корректирующей массы.
2.Устройство по п.1, о т л и ч а- ю щ е е с я тем, что блок измерения дисбаланса выполнен в виде соединен712
ного со схемой преобразования коммутатора, соединенных с ним генератора пилообразного напряжения, схемы фиксации максимального уровня, запоминающего элемента, схемы определения амплитуды, связанной со схемой управления, выход которой связан с обмотками двигателя поворота, и схемы фиксации заданного уровня, выход кото6691
рой связан с обмотками двигателя возвратно-поступательного перемещения.
3, Устройство по п.1, о т л и ч ас ю щ е е с я тем, что корректирзтощая масса выполнена в виде закрепляемого на подвижной части прибора элемента с полусферическим углублением, заполненным затвердевающей жидкостью/


| название | год | авторы | номер документа |
|---|---|---|---|
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
| Способ определения погрешности магнитоэлектрического прибора от неуравновешенности | 1985 |
|
SU1328760A1 |
| Стенд для балансировки подвижной части электроизмерительного прибора | 1983 |
|
SU1142743A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Способ изготовления ротора электростатического гироскопа и устройство для осуществления этого способа | 2016 |
|
RU2638870C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 1971 |
|
SU424371A3 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |

Изобретение относится к балансировочной технике и может быть использовано для статической балансировки подвижных систем электроизмери- .тельных приборов. Цель изобретения -, повышение надежности устройства и точности балансировки за счет использования в качестве датчика самого балансируемого прибора и исключения подвесов для закрепления подвижной части. Прибору, закрепленному на платформе, сообщаются поступатель-- колебания. Напряжение с клемм прибора, пропорциональное статичес Л кой неуравновешенности, поступает в блок измерения дисбаланса. На клеммы прибора с выхода запоминающего элемента поступает напряжение, соответствующее максимальному сигналу, благодаря чему подвижная часть остается повернутой; Двигатель поворс- та разворачивает платформу таким образом, что сигнал, поступивший в блок измерения, становится минимальным. При зтом в углублении элемента происходит смещение затвердевающей при освещении жидкости являющейся корректирующей массой. 2 з.п.ф-лы, 2 ил. § (Л
- Фиг. 1
30
J/
3uff
a
в ид A
4 р rf г-JФиг.2
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО | 0 |
|
SU375506A1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 0 |
|
SU177126A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
