Изобретение относится к машиностроению и может быть использовано в механизмах для преобразования возвратно-поступательного движения во вращательное.
Известен механизм для преобразования движения, содержащий корпус, размещенные в нем две зубчатые рейки и взаимодействующее с ними колесо, выполненное в виде зубчатого сектора, при этом зубчатые рейки смещены одна относительно другой на половину расстояния между их зубьями, а активные поверхности первого и последнего зубьев сектора срезаны от окружностей выступов до окружности впадины или от основной окружности впадин и коэффициент перекрытия этих зубьев выбран меньшим или равным единице [1]
Известен механизм преобразования возвратно-поступательного прямолинейного движения в одно направленное вращательное движение, содержащий корпус, две зубчатые рейки, соединенные между собой и перемещающиеся в неподвижных направляющих, вал, два свободно вращающихся на валу и взаимодействующих попеременно с рейками зубчатых колеса с собачками; сидящими на осях, закрепленных на них, первое храповое колесо, жестко закрепленное на валу и взаимодействующее попеременно с собачками, и второе храповое колесо, зубья которого встречно направлены к зубьям первого храпового колеса, два неподвижно установленных на корпусе и два качающихся в плоскости торцов зубчатых колес упорами дополнительные собачки в виде сидящих на осях, закрепленных на зубчатых колесах, двуплечих рычагов, каждая из которых взаимодействует одним плечом с одним из храповых колес, а другим поочередно с неподвижным и качающимся упорами [2]
Размещение двух зубчатых реек не в одной плоскости, наличие двух колес и размещение их тоже в не одной плоскости, на валу приводит к возникновению больших знакопеременных изгибающих моментов на вал поочередно в плоскостях размещения реек, чем при размещении реек в одной плоскости, а также увеличивает габариты механизма.
Задача изобретения уменьшение изгибающих моментов, действующих на вал зубчатых элементов, и уменьшение габаритов механизма в целом путем выполнения зубчатых элементов в виде секторов с полостями и размещения их вместе с двумя рейками в одной плоскости.
Для этого в механизме, содержащем корпус с неподвижными направляющими, установленные в соответствующих направляющих с возможностью перемещения две зубчатые рейки, соединенные между собой, установленные в корпусе вал, жестко закрепленное на валу храповое колесо, установленные на валу с возможностью свободного вращения два зубчатых элемента, предназначенные для взаимодействия с соответствующими рейками, и две собачки, связанные с соответствующими зубчатыми элементами посредством закрепленных на них осей и предназначенные для взаимодействия с храповым колесом, согласно изобретению зубчатые рейки размещены в одной плоскости, зубчатые элементы выполнены в виде секторов с полостями с центральными углами секторов γ1иγ2, сумма которых выбрана из следующих соотношений:
γ1+α1+γ2+α2≅360о,
α1=α2≥β, где γ1иγ2 центральные углы соответствующих секторов;
α1иα2 углы рабочего хода соответствующих секторов;
β- угол шага зубьев храпового колеса, и П-образными ступицами, размещенными на валу симметрично относительно храпового колеса, причем в полости ступицы первого сектора размещено храповое колесо, в полости ступицы второго сектора размещена ступица первого сектора, а собачки установлены в полостях соответствующих секторов.
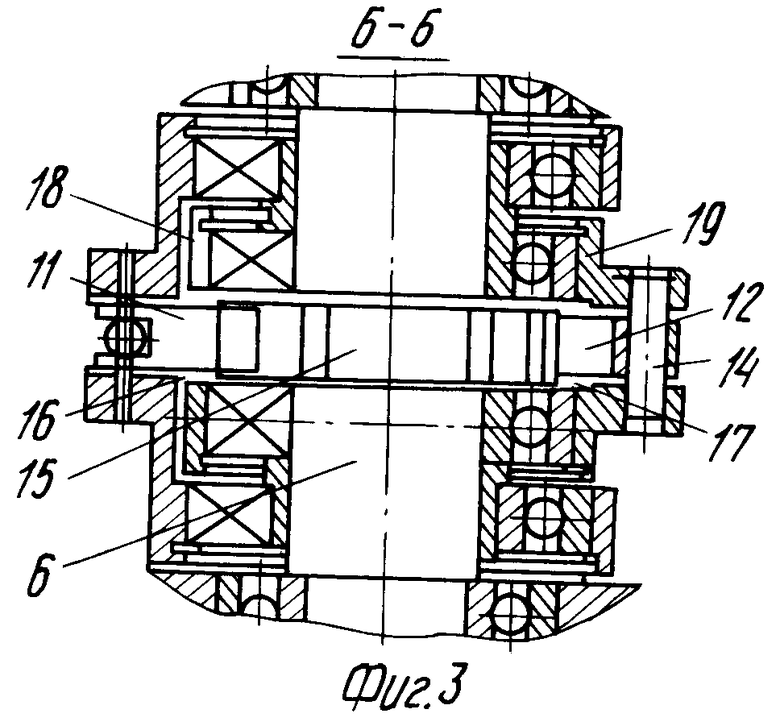
На фиг. 1 изображен механизм преобразования возвратно-поступательного прямолинейного движения в направленное вращательное; на фиг.2 сечение А-А на фиг.1; на фиг.3 сечение Б-Б на фиг.2.
Механизм преобразования возвратно-поступательного прямолинейного движения в направленное вращательное состоит из корпуса 1, двух зубчатых реек 2 и 3, неподвижных направляющих 4 и 5, вала 6, двух зубчатых элементов 7 и 8, выполненных в виде зубчатых секторов с центральными углам γ1иγ2, установленных на валу 6 с возможностью поворота их рабочего хода α1иα2 и взаимодействия с рейками 2 и 3, двух подпружиненных пружинами 9 и 10 собачек 11 и 12, установленных на осях 13 и 14 с возможностью качания и взаимодействия с храповиком 15, жестко закрепленным на валу 6.
Зубчатые элементы выполнены с полостями 16 и 17 для размещения собачек 11 и 12 и П-образной формы ступиц 18 и 19 с полостями 20 и 21. Ступицы 18 и 19 зубчатых элементов 7 и 8 установлены на валу 6 с помощью подшипников 22 и 23. В полости 20 ступицы 18 зубчатого элемента 7 размещена ступица 19 зубчатого элемента 8 и в полости 21 ступицы 19 зубчатого элемента 8 размещен храповик 15.
Сумма центральных углов γ1иγ2 секторов зубчатых элементов выбрана из следующих соотношений:
γ1+α1+γ2+α2≅360о,
α1+α2≥β где γ1иγ2- центральные углы секторов зубчатых элементов 7 и 8 соответственно;
α1иα2 углы рабочего хода соответствующих секторов зубчатых элементов 7 и 8;
β- угол шага храпового колеса.
Механизм также содержит концевые выключатели 24 и 25, водило 26, пневмоцилиндры 27 и 28, регулировочные гайки 29 и 30 и подшипники 31 вала 6.
Механизм работает следующим образом.
При подаче давления в пневмоцилиндр 28 зубчатые рейки 2 и 3 вместе с водилом 26, перемещаясь в направлении пневмоцилиндра 27, взаимодействуют с зубчатыми элементами 7 и 8, вращающимися во взаимно противоположных направлениях относительно друг друга на углы α1иα2. Собачка зубчатого элемента 8 находится в зацеплении с зубом храповика 15, поворачивающегося вместе с валом 6 на подшипниках 31 против часовой стрелки, на угол β, а зубчатый элемент 7, вращаясь на подшипниках 22, по часовой стрелке, перемещает собачку 11 по поверхности зуба храповика 15 на угол α1. В конце хода водило 26 упирается в регулировочную гайку 29, зубчатые элементы 7 и 8 повернуты на углы α1иα2, а вал 6 с храповиком 15 на угол β. Конечный выключатель 25 переключается направление на подачу давления в пневмоцилиндр 27.
При подаче давления в пневмоцилиндр 27 зубчатые рейки 2 и 3 вместе с водилом 26 перемещаются в направлении пневмоцилиндра 28, взаимодействуют с зубчатыми элементами 7 и 8 и вращают их в противоположном направлении по сравнению с предыдущим движением. Вследствие этого, находящaяся в зацеплении с зубом храповика 15 собачка 11 проворачивает храповик 15 с валом 6 на подшипниках 31 против часовой стрелки на угол β
Зубчатый элемент 8, проворачиваясь на подшипниках 23 по часовой стрелке, перемещает собачку 12 по поверхности зуба храповика 15 на угол α2. В конце хода водило 26 нажимает на конечный выключатель 24 и упирается в регулировочную гайку 30, в результате происходит переключение движения водила 26.
Размещение двух зубчатых реек в одной плоскости, выполнение двух зубчатых элементов в виде зубчатых секторов с полостями для размещения собачек и П-образной формы ступиц с образованием полости в каждой, размещение в полости ступицы одного зубчатого элемента ступицы другого зубчатого элемента, размещение храповика в полости ступицы другого зубчатого элемента и выполнение зубчатых элементов в виде секторов, сумма узлов которых и сумма углов их рабочих ходов не превышает 360о, а также выполнение условия равенства углов рабочего хода и выполнение этих углов большими углами шага зубьев храповика позволяет уменьшить изгибающие моменты, действующие на вал, и габариты механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444430C1 |
| МЕХАНИЗМ ФИКСИРОВАНИЯ ДИАФРАГМЫ | 1992 |
|
RU2020529C1 |
| Реверсивный храповой механизм | 1988 |
|
SU1634887A1 |
| РЕВЕРСИВНАЯ МУФТА СВОБОДНОГО ХОДА | 1990 |
|
SU1802586A1 |
| Магнитное грузозахватное устройство | 1989 |
|
SU1763341A1 |
| УСТРОЙСТВО ДЛЯ ШАГОВОГО ПЕРЕМЕЩЕНИЯ ДЕТАЛЕЙ | 1992 |
|
RU2042490C1 |
| Устройство для привода транспортеров питателей-дозаторов | 1989 |
|
SU1655405A1 |
| РУЧНАЯ ХРАПОВАЯ ЛЕБЕДКА | 1990 |
|
RU2028272C1 |
| УСТРОЙСТВО ДЛЯ ВЛАГОТЕПЛОВОЙ ОБРАБОТКИ МАСЛОСОДЕРЖАЩЕГО МАТЕРИАЛА ПЕРЕД ИЗВЛЕЧЕНИЕМ МАСЛА | 1990 |
|
RU2020146C1 |
| Храповой механизм | 1986 |
|
SU1395884A1 |

Изобретение относится к машиностроению и может быть использовано в механизмах для преобразования возвратно-поступательного движения во вращательное. Зубчатые рейки 2 и 3, установленные в неподвижных направляющих 4 и 5 корпуса, размещены в одной плоскости. Зубчатые элементы 7 и 8, установленные на валу 6, выполнены в виде секторов с полостями с центральными углами секторов соответственно γ1 и γ2, сумма которых выбрана из соотношения: γ1+α1+γ2 +α2 ≅ 360°, α1=α2≥ β, где γ1 и γ2 - центральные углы соответствующих секторов; α1 и α2 - углы рабочего хода соответствующих секторов; β - угол шага зубьев храпового колеса 15, и П-образными ступицами 18 и 19, размещенными на валу 6 симметрично относительно храпового колеса 15. В полости 21 ступицы 19 размещено храповое колесо 15, в полости 20 ступицы 18 размещена ступица 19. Подпружиненные собачки установлены в полостях зубчатых элементов и предназначены для взаимодействия с храповым колесом 15. При перемещении зубчатых реек 2 и 3 зубчатые элементы 7 и 8 вращаются во взаимно противоположных направлениях на углы a1 и α2 , вызывая поочередное взаимодействие собачек с зубьями храпового колеса 15, и соответственно, поворот вала 6. 3 ил.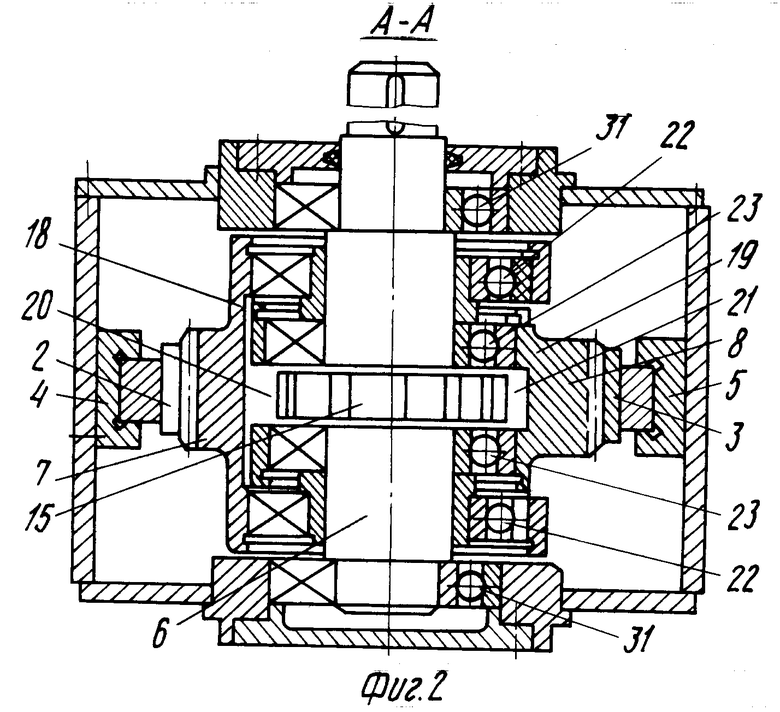
МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ В НАПРАВЛЕННОЕ ВРАЩАТЕЛЬНОЕ, содержащий корпус с неподвижными направляющими, устаноавленные в соответствующих направляющих с возможностью перемещения две зубчатые рейки, соединенные между собой, установленные в корпусе вал, жестко закрепленное на валу храповое колесо, установленные на валу с возможностью свободного вращения два зубчатых элемента, предназначенных для взаимодействия с соответствующими рейками, и две собачки, связанные с соответствующими зубчатыми элементами посредством закрепленных на них осей, и предназначенные для взаимодействия с храповым колесом, отличающийся тем, что зубчатые рейки размещены в одной плоскости, зубчатые элементы выполнены в виде секторов с полостями с центральными углами секторов соответственно γ1 и γ2, сумма которых выбрана из следующих соотношений:
γ1+ α1+γ2+α2≅ 360°,
α1=α2≥ β,
где γ1 и γ2 центральные углы соответствующих секторов;
α1 и α2 углы рабочего хода соответствующих секторов;
β угол шага зубьев храпового колеса,
и П-образными ступицами, размещенными на валу симметрично относительно храпового колеса, причем в полости ступицы первого сектора размещено храповое колесо, в полости ступицы второго сектора размещена ступица первого сектора, а собачки установлены в полостях соответствующих секторов.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм преобразования возвратно- пОСТупАТЕльНОгО пРяМОлиНЕйНОгОдВижЕНия B ОдНОНАпРАВлЕННОЕ ВРАщАТЕльНОЕдВижЕНиЕ | 1979 |
|
SU811017A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
