i
(21)4469025/28
(22)26,04 88
(46) 15„03 91, Вюл, Г 10
(71)Всесоюзный научно-исследовательский и конструкторско-технологи- ческий институт компрессорного машиностроения
(72)С.АсКвачан, П.П.Приходченко, Л.Ф.Евтушенко и О.Л.Рухлов
(53) 721.838 (088.8)
(56) Авторское свидетельство СССР
If 1099152, кл. F 16 II 27/04, 1984.
(54) РКВЕРСИВНЫП ХРАЛОВЫП МЕХАНИЗМ (57) Изобретение относится к машиностроению и может быть использовано в устройствах прерывистого движения, требукмцнх реверсирования приводного звена, например, для регулирования положения пробки крана-регулятора. Целью изобретения является повышение надежности и расширение кинематических возможностей путем иного выполнения реверсивного переключателя собачгк. Реверсивный переключа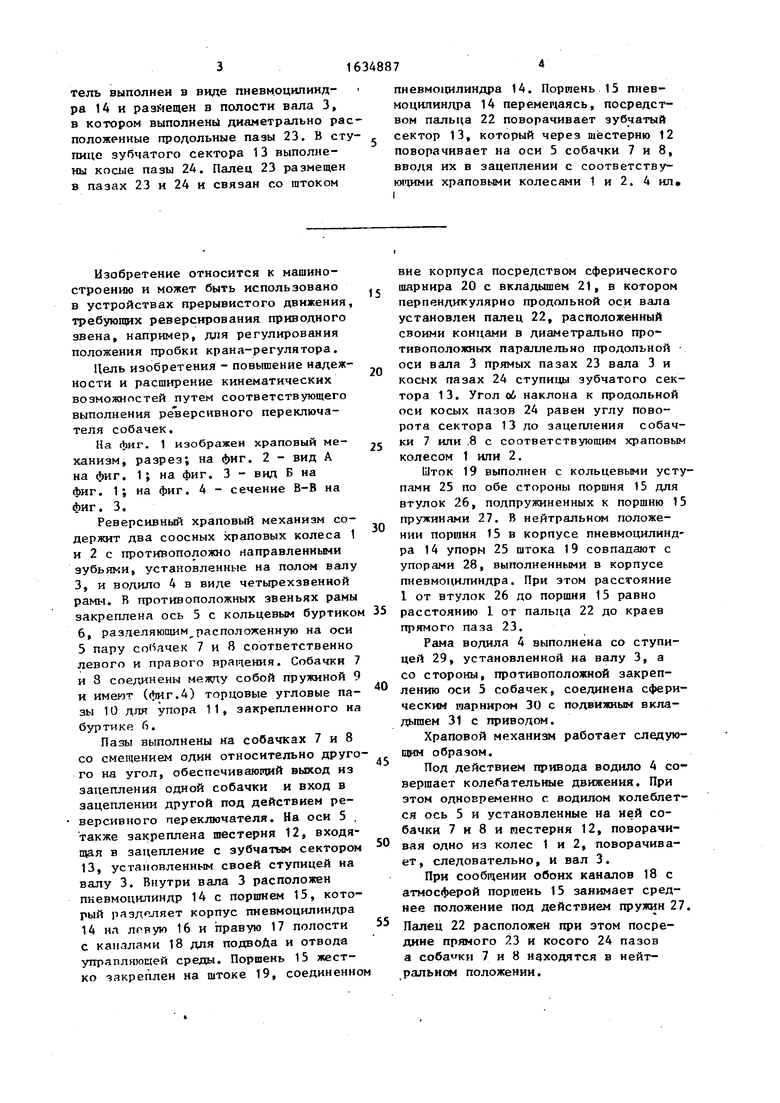

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444430C1 |
| Реверсивный храповой механизм | 1986 |
|
SU1366746A1 |
| РЕВЕРСИВНАЯ МУФТА СВОБОДНОГО ХОДА | 1990 |
|
SU1802586A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ В НАПРАВЛЕННОЕ ВРАЩАТЕЛЬНОЕ | 1992 |
|
RU2036358C1 |
| Механизм привода реверсивного транспортера машины для распределения сыпучего материала | 1989 |
|
SU1648270A1 |
| Установка для контактной сварки | 1978 |
|
SU764893A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Устройство для шагового перемещения | 1988 |
|
SU1566135A1 |
| Устройство для прокручивания рабочих органов зерноуборочного комбайна | 1981 |
|
SU1012836A2 |
| Шурупозавертывающий многошпиндельный станок | 1988 |
|
SU1608041A1 |

з (Л
тель выполнен в виде пневмоципннд- ра 14 и размещен в полости вала 3, в котором выполнены диаметрально расположенные продольные пазы 23. В ступице зубчатого сектора 13 выполнены косые пазы 24. Палец 23 размещен в пазах 23 и 24 и связан со штоком
Изобретение относится к машиностроению и может быть использовано в устройствах прерывистого движения, требующих реверсирования приводного звена, например, для регулирования положения пробки крана-регулятора.
Цель изобретения - повышение надежности и расширение кинематических возможностей путем соответствующего выполнения реверсивного переключателя собачек.
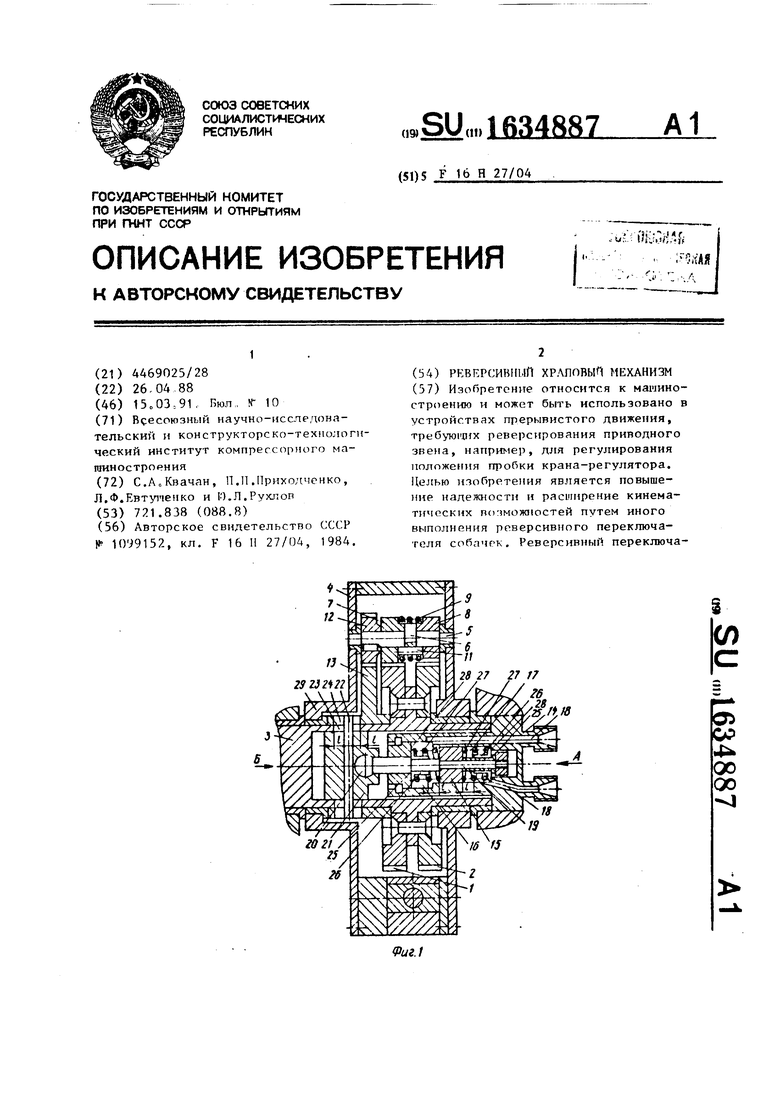
На фиг. 1 изображен храповый механизм, разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 3.
Реверсивный храповый механизм содержит два соосных храповых колеса 1 и 2 с противоположно направленными зубьями, установленные на полом валу 3, и водило 4 в виде четырехзвенной рамы. В противоположных звеньях рамы закреплена ось 5 с кольцевым буртико 6, разделяющим расположенную на оси 5 пару собачек 7 и 8 соответственно левого и правого вращения. Собачки 7 и 8 соединены между собой пружиной 9 и имеют (фиг.4) торцовые угловые пазы 10 для упора 11, закрепленного на буртике 6.
Пазы выполнены на собачках 7 и 8 со смещением один относительно другого на угол, обеспечивающий выход из зацепления одной собачки и вход в зацеплении другой под действием реверсивного переключателя. На оси 5 , также закреплена шестерня 12, входящая в зацепление с зубчатым сектором 13, установленным своей ступицей на валу 3. Внутри вала 3 расположен пкевмоцилиндр 14 с поршнем 15, который разделяет корпус пневмоцилиндра 14 нл лгвую 16 и правую 17 полости с каналами 18 для подвода и отвода управляющей среды. Поршень 15 жестко закреплен на штоке 19, соединенно
пневмоцилиндра 14. Поршень 15 пнев- моцилиндра 14 перемещаясь, посредством пальца 22 поворачивает зубчатый сектор 13, который через шестерню 12 поворачивает на оси 5 собачки 7 и 8, вводя их в зацеплении с соответству- км-щми храповыми колесами 1 и 2. 4 ил
0
5
0
5
0
5
0
5
вне корпуса посредством сферического шарнира 20 с вкладышем 21, в котором перпендикулярно продольной оси вала установлен палец 22, расположенный своими концами в диаметрально противоположных параллельно продольной оси вала 3 прямых пазах 23 вала 3 и косых пазах 24 ступицы зубчатого сектора 13. Угол об наклона к продольной оси косых пазов 24 равен углу поворота сектора 13 до зацепления собачки 7 или .8 с соответствующим храповым колесом 1 или 2.
Шток 19 выполнен с кольцевыми уступами 25 по обе стороны поршня 15 для втулок 26, подпружиненных к поршню 15 пружинами 27. В нейтральном положении поршня 15 в корпусе пневмоцилиндра 14 упоры 25 штока 19 совпадают с упорами 28, выполненными в корпусе пневмоцилиндра. При этом расстояние 1 от втулок 26 до поршня 15 равно расстоянию 1 от пальца 22 до краев прямого паза 23.
Рама водила 4 выполнена со ступицей 29, установленной на валу 3, а со стороны, противоположной закреплению оси 5 собачек, соединена сферическим шарниром 30 с подвижным вкладышем 31 с приводом.
Храповой механизм работает следующим образом.
Под действием привода водило 4 совершает колебательные движения. При этом одновременно г. водилом колеблется ось 5 и установленные на ней собачки 7 и 8 и иестерня 12, поворачивая одно из колес 1 и 2, поворачивает, следовательно, и вал 3.
При сообщении обоих каналов 18 с атмосферой поршень 15 занимает среднее положение под действием пружин 27. Палец 22 расположен при этом посредине прямого 23 и косого 24 пазов а соба«кн 7 и 8 находятся в нейтральном положении.
51
Для обеспечения приводному валу 3 поворота, например, в левую сторону управляющую среду подают в левую полость 16 пневмоцилиндра 14. Правая полость 17 сообщается с атмосферой. Под действием давления управляющей среды поршень 15 перемещается вправо сжимая пружину 27 до упора во втулку 26. Одновременно с поршнем перемещается палец 22 и взаимодействуя с полым пазом 24, поворачивает зубчатый сектор 13 и связанную с ним шестерню 12. Упор 11, воздействуя на собачку 8, поднимает ее над колесом 2, а собачка 7 под действием пружины 9 входит в зацепление с колесом 1. Под действием привода на водило 4 колесо 1 поворачивает вал 3 на требуемый угол. Работа храпового механизма в обратном направлении происходит аналогично описанному после переключения собачек, для чего управляющую среду подают в правую полость пнев- моциаиндра. Формула изобретения
Реверсивный храповый механизм, содержащий вал, установленные на нем два соосных храповых колеса с противоположно направленными зубьями, водило, выполненное в виде четырех- звенной рамы, на которой закреплена по меньшей мере одна пара собачек, размещенных на одной оси и предназначенных для поочередного взаимодействия с соответствующими храповыми колесами, и реверсивный переключатель собачек, отлич ающий- с я тем, что, с целью повышения надежности и расширения кинематических
34887
возможностей, вал выполнен полым и с двумя диаметрально противоположными продольными пазами, водило установлено на валу, ось собачек закреплена в противоположных звеньях рамы параллельно валу и имеет кольцевой буртик, на обращенных один к другому торцах собачек выполнены со смещеJQ нием один относительно другого пазы, реверсивный переключатель выполнен в виде размещенного в полости вала силового цилиндра с двумя штоками, на внутренней поверхности цилиндра
15 на каждом его штоке выполнены упоры, попарно совпадающие в среднем положении поршня, а механизм снабжен двумя втулками, расположенными на соответствующих штоках, подпру20 жиненными к поршню и предназначенными для взаимодействия с соответствующими упорами штока и цилиндра, пружиной, связывающей попарно со- блчки, дополнительным упором, закреп25 ленным на кольцевом буртике и предназначенным для взаимодействия с пазами собачек, установленным на валу зубчатым сектором со ступицей, имеющей косые сквозные пазы, сопрягаемые
3Q с продольными пазами вала, жестко закрепленной на оси собачек шестерней, предназначенной для взаимодействия с зубчатым сектором, и шарнир- но связанным с одним из штоков силового цилиндра и установленным в по лости вала вкладышем с пальнем, предназначенным для взаимодействия с пазами вала и ступицы зубчатого сектора, а при среднем положении поршня дополнительный упор расположен у
40
торца паза одной из собачек.
В
V№
ZC8VE91
