11
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитное грузозахватное устройство | 1975 |
|
SU821379A1 |
| Грузозахватное устройство | 1990 |
|
SU1735195A1 |
| МАГНИТНЫЙ ЗАХВАТ | 1971 |
|
SU304811A1 |
| Грузозахватное устройство | 1986 |
|
SU1402533A1 |
| Грузозахватное устройство для пакетированных грузов | 1988 |
|
SU1664716A1 |
| Автоматический магнитный захват | 1979 |
|
SU770989A1 |
| Магнитный захват | 1978 |
|
SU770988A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО НА ПОСТОЯННЫХ МАГНИТАХ | 2010 |
|
RU2452681C1 |
| Автоматический магнитный захват Быченко | 1980 |
|
SU933602A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1324980A1 |
Использование: в подъемно-транспортном оборудовании, в т.ч. в грузозахватных устройствах с постоянными магнитами. Сущность изобретения: устройство содержит корпус 1 с магнитными блоками неподвижными 2, подвижными 3. Подвижные блоки имеют общий силовой вал 4, на котором жестко закреплены храповики и свободно установлены зубчатые колеса с храповыми собачками. Грузовая подвеска 11 имеет зубчатые рейки, которые вступают в контакт с зубчатыми колесами, на зубчатых рейках жестко установлены направляющие 14 с силовыми пружинами, опирающимися на элемент 16 корпуса 1. Устройство обладает повышенной грузоподъемностью и обеспечивает отсутствие самопроизвольного отключения подвижных магнитных блоков в момент переноски грузов. 5 ил.
/S
Ьг
У/7/777Л
7ГЛ1ег
г
а
1
1ег
ш.
Щ
1;1
I
-AL
VI
О CJ
со
Изобретение относится к подъемно- транспортному оборудованию, в частности к грузозахватным устройствам с постоянными магнитами, и может найти применение в раскройно-заготовительных цехах для погрузки металлопроката и заготовок.
Известно грузозахватное устройство, в котором корпус выполнен с дополнительной магнитопроводящей стенкой, расположенной параллельно первым, устройство снабжено дополнительным постоянным магнитом и поворотным магнитным блоком, размещенным между наружной стенкой корпуса и дополнительной магнитопроводящей стенкой, причем все постоянные магниты обращены одноименными полюсами друг к другу, а дополнительный поворотный блок смещен по высоте относительно основного поворотного магнитного блока на величину, не большую его диаметра. Для совместного поворота магнитных блоков предусмотрены зубчатые колеса, закрепленные на торцах поворотных магнитных блоков, находящихся в зацеплении с ведущим зубчатым колесом, связанным с рукояткой перемещения. Недостатком известного устройства является ручное управление размыканием и замыканием магнитных потоков и невозможность работы устройства в автоматическом режиме,
Известно магнитное грузозахватное устройство, содержащее с установленными в нем магнитными блоками подвижным и неподвижным, механизм управления замыканием и размыканием магнитного потока, работающий за счет сил собственного веса устройства, состоящий из подпружиненной подвески с зубчатыми рейками, взаимодействующими с зубчатыми секторами, шар- нирно связанные с ними и с магнитными блоками поворотными рычагами с демпфирующими элементами. Однако грузоподъемность на единицу веса устройства имеет низкие значения, так как механизм управления замыканием и размыканием магнитного потока работает только от пружины подвески, которая взводится при движении подвески вверх, при этом силовая характеристика пружины зависит от собственного веса самого грузозахватного устройства. Во включенном положении магнитной системы подвижный магнитный блок стремится к самовыключению ,для чего в конструкции предусматриваются демпфирующие элементы, выполненные в виде подпружиненных пальцев.
Цель изобретения - повышение грузоподъемности, ликвидация самопроизвольного отключения подвижных блоков с
постоянными магнитами в момент переноски грузов.
Поставленная цель достигается тем, что в магнитном грузозахватном устройстве, содержащем корпус с установленными в нем подвижными и неподвижными блоками с постоянными магнитами, механизм управления замыканием и размыканием магнитного потока, включающий подпружиненную
0 подвеску с зубчатыми рейками, взаимодействующими с зубчатыми колесами, свободно установленными на силовом валу, храповики, жестко связанные с силовым валом, подпружиненные храповые собачки,
5 установленные с возможностью вращения на зубчатых колесах и с возможностью зацепления с храповиками, механизм управления выполнен в виде нереверсивного силового вала, зубчатые рейки разнесены
0 на величину делительного диаметра зубчатых колес и взаимодействуют с диаметрально противоположными сторонами зубчатых колес, а зубья храповиков и подпружиненные храповые собачки расположены так, что
5 обеспечивается поочередная передача усилия для вращения нереверсивного силового вала в одном направлении при каждом ходе зубчатых реек на величину, соответствующую половине пути перемещения подвиж0 ных магнитных блоков с постоянными магнитами, необходимого для переключения устройства, Полное исключение самопроизвольного отключения магнитных блоков в момент подъема и переноса грузов
5 достигается за счет того, что силовой вал вращается в одну сторону и он полностью запирается в положении магнитной системы включено при крайнем верхнем положении зубчатых реек.
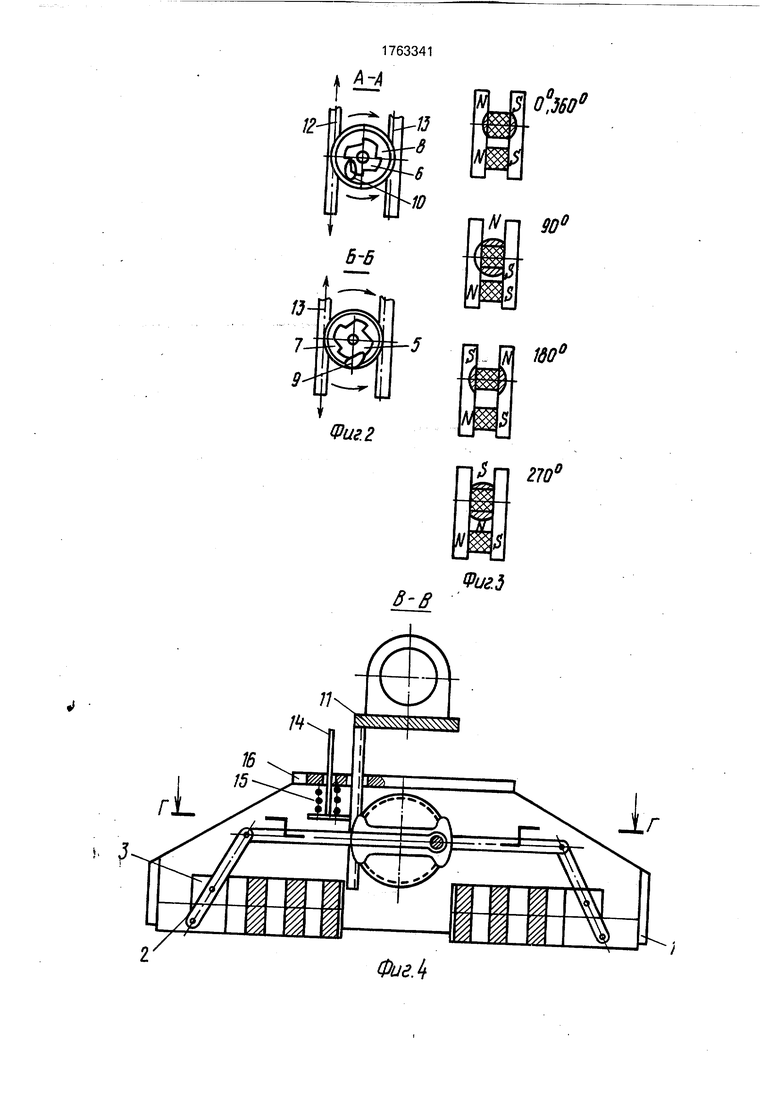
0 На фиг. 1 представлен вариант исполнения устройства с поворотным подвижным магнитным блоком, общий вид; на фиг. 2 - разрез А-А, Б-Б на фиг. 1; на фиг. 3 - положение подвижной магнитной системы при
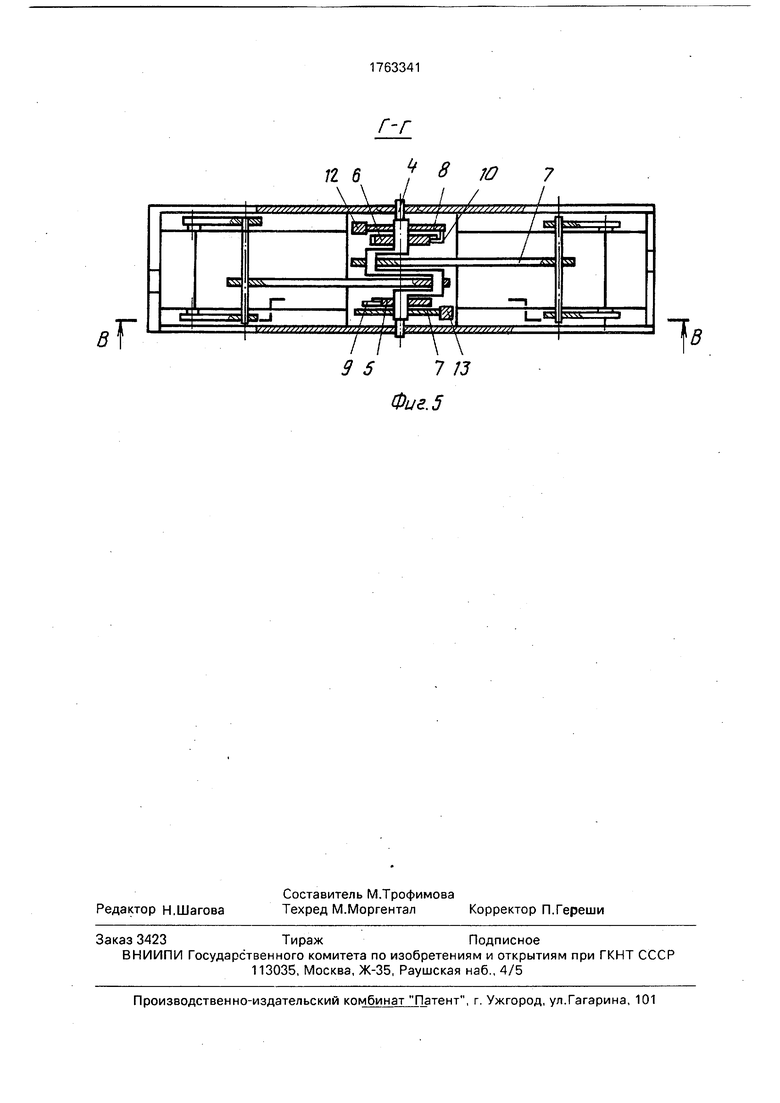
5 работе механизма управления; на фиг. 4 - вариант исполнения устройства с плоскими подвижными магнитными блоками (разрез В-В на фиг, 5); на фиг. 5 - разрез Г-Г на фиг. 4,
0 Модуль магнитного грузозахватного устройства состоит из корпуса 1, в котором установлены неподвижные магнитные блоки 2 и подвижные магнитные блоки 3. Подвижные магнитные блоки имеют общий
5 силовой вал 4, на силовом валу 4 установлены жестко храповики 5, б, на этом же валу 4 свободно установлены зубчатые колеса 7, 8 с храповыми собачками 9 , 10. Грузовые подвески 11, вступающие в контакт с зубча- тыми колесами 7, 8, имеют зубчатые рейки
12, 13, на которых жестко смонтированы направляющие 14 с силовыми пружинами 15, опирающимися на элемент 16 корпуса 1. В устройстве по исполнению фиг. 4 подвижные магнитные блоки соединены с силовым валом 4 посредством системы рычагов и тяг 17.
Устройства работают следующим образом.
В подвешенном к крюку грузоподъемном устройстве под действием собственного его веса пружины 15 системы, подвеска 11 находится в крайнем верхнем положении. При установке устройства на груз под действием пружин 15 и собственного веса подвески 11 движутся вниз зубчатые рейки 12,13, взаимодействуя с зубчатыми колесами 7, 8, при этом одно зубчатое колесо 8 вращается по часовой стрелке, а другое 7 против часовой стрелки, собачка 10 проскальзывает по храповику 6, собачка 9 вступает в контакт с храповиком 5 и поворачивает силовой вал 4 на величину 1 /2 пути движения подвижного магнитного блока. При подъеме устройства за подвеску 11 собачка 9 проскальзывает по храповику 5, зубчатое колесо 7 свободно проворачивается на валу 4, а собачка 10 вступает в контакт с храповиком 6 и поворачивает силовой вал на величину 1/2 пути движения подвижного магнитного блока. Когда подвеска движется вверх до крайнего верхнего положения, происходит сжатие пружин 15 и преодолению пиковой характеристики магнитной системы в положение Включено способствует не только вес самого устройства, но и вес притягиваемого груза, самовыключение магнитной системы исключается полностью, так как магнитные блоки полностью запираются системой храповиков, собачек, зубчатых колес и реек. В этом положении происходит перенос груза.
Автоматический сброс детали происходит следующим образом.
Как только устройство с грузом опускается на место разгрузки подвеска 11 движется вниз за счет пружин 15 и собственного веса, собачка 9 вступает в контакт с храповиком 5, а собачка 10 свободно проскальзывает по храповику 6, силовой вал 4 поворачивается на 1/2 пути перемещения подвижного магнитного блока от положения Включено и занимает положение, соответствующее 90 (см. фиг. 3). При подъеме устройства подвеска 11 движется вверх, собачка 10 вступает в контакт с храповиком 6, поворачивает силовой вал 4 на 1 /2 пути перемещения подвижного блокаде положения 180°, что соответствует полному выключению магнитной системы, при этом груз остается на месте разгрузки,
а устройство перемещается к месту захвата следующего груза, цикл повторяется. Так как магнитная система всегда стремится самоотключиться, то при выключении магнитной системы дополнительных сил поворота
или движения подвижного магнитного блока не требуется. Магнитный модуль прост в изготовлении и надежен в эксплуатации.
Формула изобретения
Магнитное грузозахватное устройство, содержащее корпус с установленными в нем подвижными и неподвижными блоками с постоянными магнитами, механизм управления замыканием и размыканием магнитного потока, включающий подпружиненную подвеску с зубчатыми рейками, взаимодействующую с зубчатыми колесами, свободно установленными на силовом валу, храповики, жестко связанные с указанным силовым валом, подпружиненные храповые собачки, установленные с возможностью вращения на зубчатых колесах и зацепления с храповиками, отличающееся тем, что, с
целью повышения грузоподъемности, ликвидации самопроизвольного отключения подвижных блоков с постоянными магнитами в момент переноски грузов, механизм управления выполнен в виде нереверсивного силового вала, зубчатые рейки разнесены на величину делительного диаметра зубчатых колес и взаимодействуют с диаметрально противоположными сторонами зубчатых колес, а зубья храповиков и подпружиненные храповые собачки расположены так, что обеспечивается поочередная передача усилия для вращения указанного нереверсивного силового вала в одном направлении при каждом ходе зубчатых реек на
величину, соответствующую половине пути перемещения подвижных магнитных блоков с постоянными магнитами, необходимого для переключения устройства.
в-в
Фиг.2
па «0
о,ж
П 90°
1д01
ПАП 270
B-ff
9игЗ
Фиг4
г-г
12 6 8 Ю 7
А I / I
Фие.5
| Грузозахватное устройство | 1984 |
|
SU1221156A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Магнитное грузозахватное устройство | 1975 |
|
SU821379A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
