77
19
СО
со
ел
00
оо
4
Изобретение относится к машиностроению и может использоваться в устройствах для шагового перемещения исполнительного звена.
Цель изобретения - повышение точности подачи за счет увеличения передаточного отношения.
На фиг. 1 изображен храповой механизм, общий вид; на фиг.2 - разрез JQ А-А на фиг.1; на фиг. 3 - разрез Б-Б на фиг. 2,
Храповой механизм содержит корпус 1, в котором на валу 2 установлено с возможностью свободного враще-)5 ния коромысло, выполненное в виде зубчатого сектора .3 с угловым шагом d расположения зубьев 4, Сектор 3
поджат пружиной 5 к упору, выполненному в виде откидной собачки 6, слу- 20 жащей для. удержания сектора 3 в определенном положении после его пошагового качания на валу 2. В исходном положении сектор 3 поджат к регулируемому упору 7. Откидная собачка 6 25 содержит рычаг В, шарнирно соединенный с сердечником 9 соленоида 10, при этом она постоянно поджимается к зубчатому профилю сектора 3 пружиной 1К С сектором 3 взаимодействузО ет собачка 12, подпружиненная пружиной 13 и установл:енная на тяге 14. Тяга 14 также свободно качается на валу 2 и поджата к регулируемому упору 15 пружиной 16. Собачка 6 содер- ,с жит также рычаг 17, а собачка 12 - выступ 18. Размыкание собачек 6 и 12 с зубвями 4 сектора 3 происходит соленоидом 10 по команде от конечного . .выключателя 19 посредством рычага 8 Q и взаимодействия рычага 17 с выступом 18 собачки 12. На секторе 3 установлена собачка 20, подцружиненная пружиной 21 к xpanoBOM i- колесу 22, Угловой шаг расположения зубьев хра- д пового колеса 22 равен где п - число зубьев 4 на секторе 3. Стопорит храповое колесо 22 откидная собачка 23, установленная в корпусе 1. Собачка 23 содержит рычаг 24, соединенный шарнирно с сердечником 25 соленоида 26, и поджимается к храповому колесу 22 пружиной 27. Собачка 2С содержит выступ 28. Размыкание собачек 20 и 23 производится соленоидом 26 и по команде от конечного выключа теля 29 посредством рычага-24 собачки 23 и выступа 28 собачки 20. Конечный выключатель 29 управляет также
50
,-55
JQ
)5
20 25зО ,с Q д С 50
55
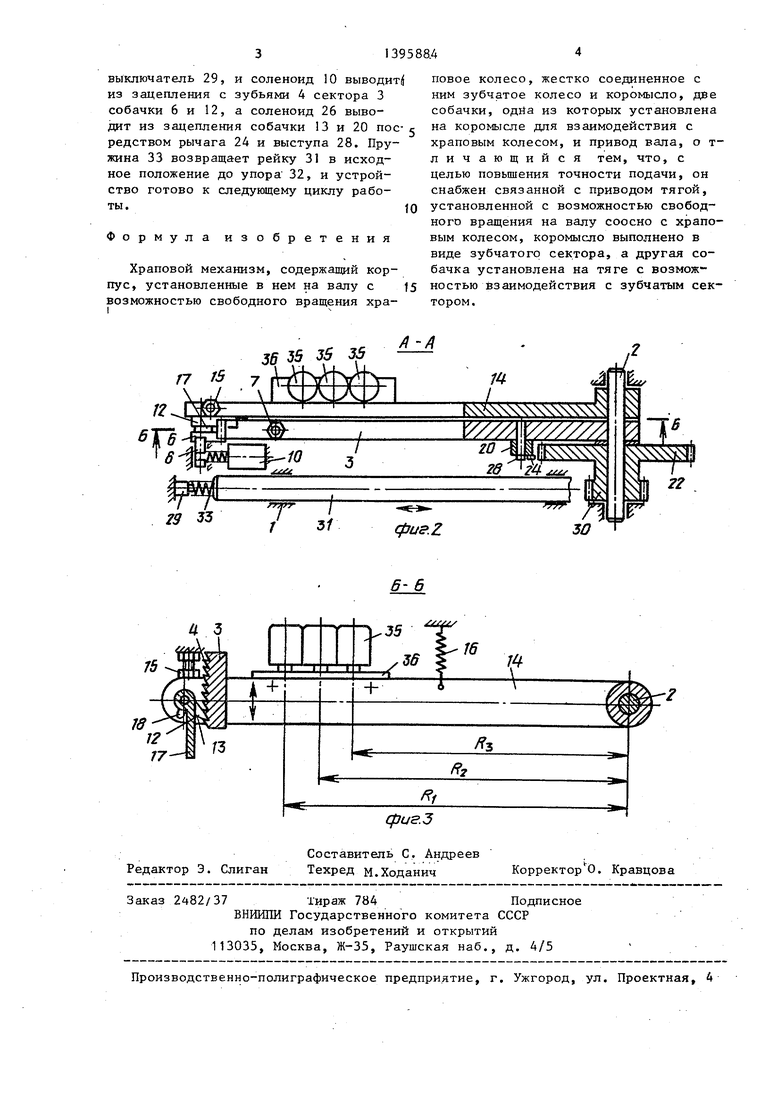
и соленоидом 10. Храповое колесо 21 жестко связано с шестерней 30, которая находится в зацеплении с рейкой 31 связанной с исполнительным механизмом (не показан). Возврат рейки 31 в исходное положение до регулируемого упора 32 осуществляется пружиной 33, связанной с ней при помоши трособлоч- ной cиcтe ШI 34. Качание тяги 14 осуществляется соленоидом 35 при помощи планки 36 в зависимости от того, на какое расстояние требуется переместить рейку 31. Количество соленоидов 35 должно соответствовать числу комбинаций шагов, например, t, t,,, 0,1 мм; t 0,2 мм; t f 0,3 мм (.число комбинаций равно трем) . Тогда число зубьев 4 сектора 3 должно быть кратным этим числам и быть равным, например, 6, 12 и т.д. Для получения этих шагов при одинаковом ходе сердечника соленоидов 35 они должны быть установлены соответственно на радиусах R R,, , R, R, (фиг. 1).
Храповой механизм работает следующим образомо
При срабатывании одного из соленоидов 35 происходит поворот тяги 14 на валу 2. Собачка 12 в это время взаимодействует с зубом 4 сектора 3 и поворачивает его, после чего напряжение с соленоида 35 снимается, и пружина 16 возвращает тягу 14 в исходное положение до упора 15. Собачка 12 в это время проскальзывает по зубу 4 сектора 3, а собачка 6 фиксирует сектор 3. Затем цикл повторяется п раз..Храповое колесо 22 под действием собачки 20 поворачивается на один зуб, т.е. угол /5 , и собачка 23 фиксирует его. В это же время происходит перемещение рейки 31 под действием шестерни 30 на один шаг. От сектора 3 срабатывает конечный выключатель 19, и соленоид втягивает сердечник 11. Рычаг 8 выводит из зацепления с зубьями 4 сектора 3 собачку 6, а рычаг 17, воздействуя на выступ 18, выводит из зацепления и собачку 12. Сектор 3 под действием пружины 5 возвращается в исходное положение до упора 7, Собачка 10 в это время проскальзывает ,и становится во впади1гу следующего зуба храпового колеса 22. Цикл повторяется до тех пор, пока рейка 31 не пройдет определенный рабочий ход, после чего она воздействует на конечный
выключатель 29, и соленоид 10 выводит из зацепления с зубьями 4 сектора 3 собачки 6 и 12, а соленоид 26 выводит из зацепления собачки 13 и 20 пос- г редством рычага 24 и выступа 28, Пружина 33 возвращает рейку 31 в исходное положение до упора 32, и устройство готово к следующему циклу работы.
fO
Формула изобретения
Храповой механизм, содержащий корпус, установленные в нем на валу с 15 возможностью свободного вращения хра
повое колесо, жестко соединенное с ним зубчатое колесо и коромысло, две собачки, один из которых установлена на коромысле для взаимодействия с храповым колесом, и привод вала, о т- личающийся тем, что, с целью повьшения точности подачи, он снабжен связанной с приводом тягой, установленной с возможностью свободного вращения на валу соосно с храповым колесом, коромысло выполнено в виде зубчатого сектора, а другая собачка установлена на тяге с возмож ностью взаимодействия с зубчатым сектором.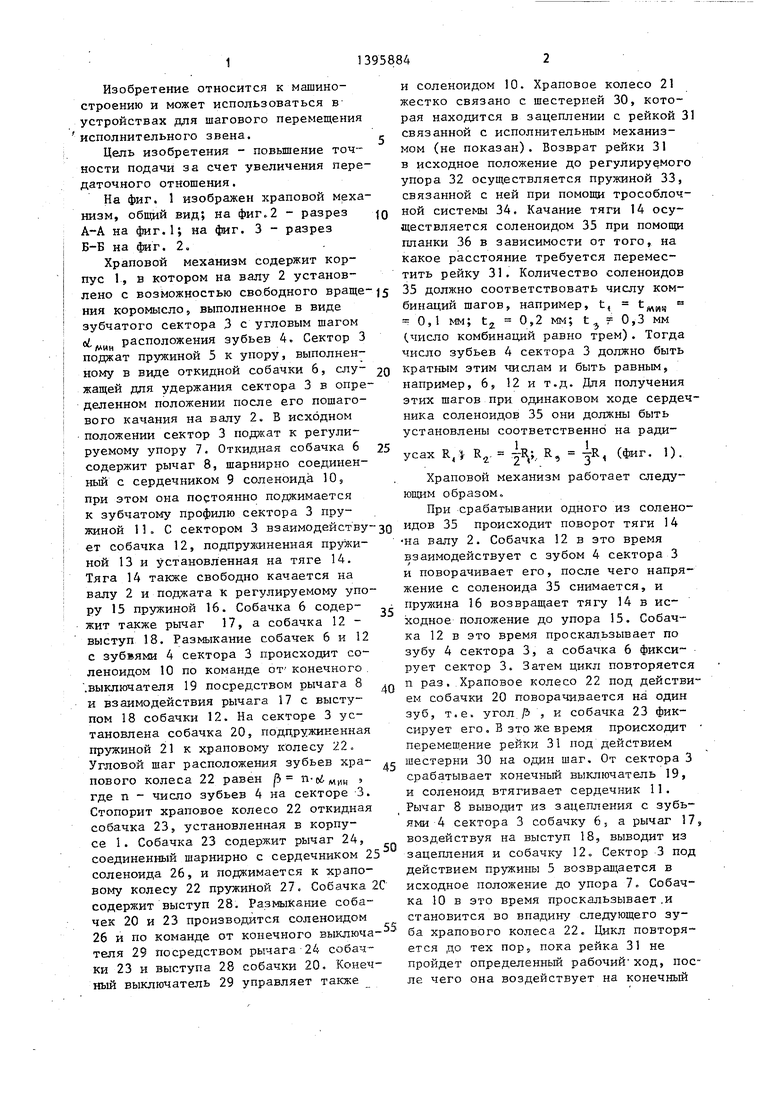
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шагового перемещения исполнительного органа установки для подачи материала в зону обработки | 1987 |
|
SU1433586A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ В НАПРАВЛЕННОЕ ВРАЩАТЕЛЬНОЕ | 1992 |
|
RU2036358C1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОКАРНЫМ СТАНКОМ | 1940 |
|
SU63198A1 |
| СТАНОК ДЛЯ ПРАВКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ В ПРОЦЕССЕ ТЕРМООБРАБОТКИ | 1970 |
|
SU272793A1 |
| ОДНОШПИНДЕЛЬНЫЙ АВТОМАТИЧЕСКИЙ ТОКАРНО-РЕВОЛЬВЕРНЫЙ СТАНОК | 1949 |
|
SU91305A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2013 |
|
RU2548870C2 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| Устройство для загрузки плоских изделий,преимущественно заготовок радиодеталей | 1985 |
|
SU1307619A1 |
Изобретение относится к машиностроению. Цель-изобретения - повышение точности подачи за счет увеличения передаточного отношения. При срабатывании одного из соленоидов 35 происходит поворот тяги на валу 2, собачка, расположенная.на тяге, взаимодействуя с зубом сектора 3, поворачивает его. При снятии напряжения с соленоида 35 пружина 16 возвращает тягу в исходное положение, а собачка 6 фиксирует сектор 3 от перемещения. Этот цикл повторяется п раз. Затем храповое колесо 22 поворачивается на один зуб под действием собачки 20, и собачка 23 фиксирует его. В зто же время происходит перемещение рейки на один шаг под действием шестерни 30, жестко соединенной с . храповым колесом 22. Таким образом, за п ходов ведущего звена - тяги, рейка, связанная с исполнительным звеном, переместится только на один шаг. 3 ил. с (Л
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| Справочное пособие | |||
| М.: Машиностроение, 1976, с | |||
| Орнито-геликоптер | 1919 |
|
SU442A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
