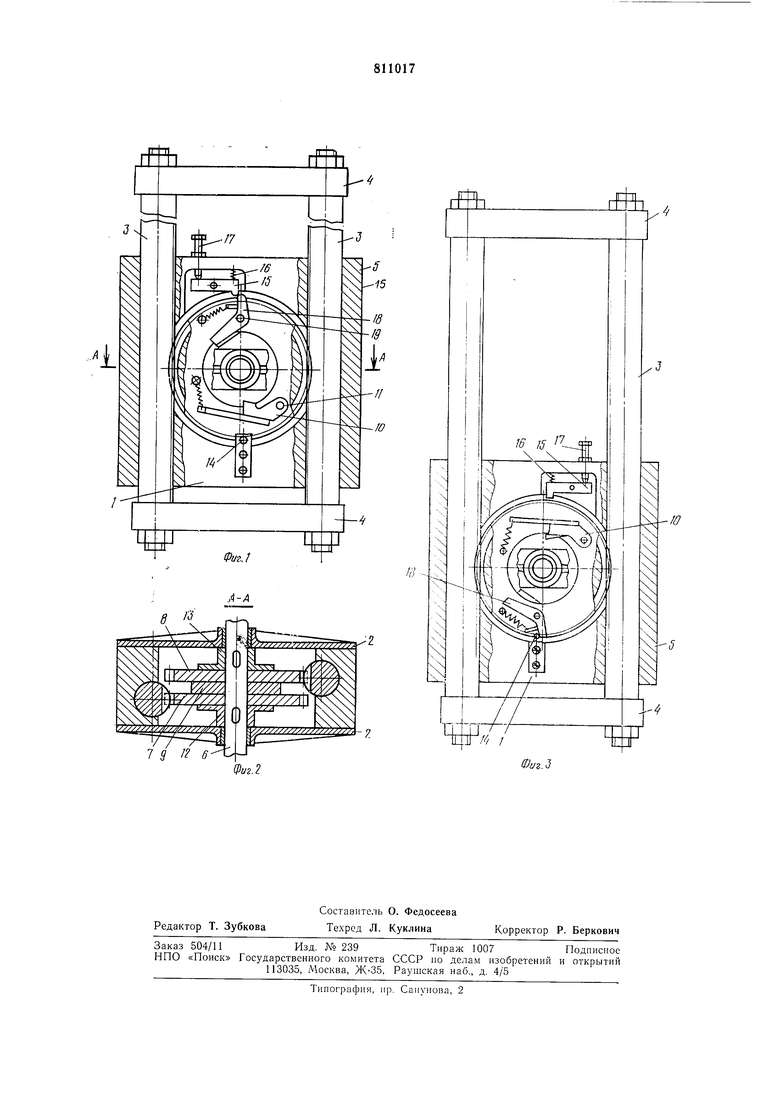
стяжками 4 и перемещающиеся в неподвижных направляющих 5.
В подшипниках 2 установлен вал 6, на котором свободно вращаются зубчатые колеса 7 и 8, разделенные кольцом 9, и на которых установлены собачки 10, сидящие на осях 11 и передающие вращение вращающемуся валу Ь. На валу 6 жестко закреплены храповое колесо 12 и храповое колесо 13, зубья которого встречно направлены к зубьям храпового колеса 12. На корпусе 1 неподвижно установлены упоры i4 и упоры 15, качающиеся в плоскости торцов зубчатых колес 7 и 8 с помощью пружин 1б и винтов 17. На зубчатых колесах 7 и 8 установлены также собачки 18, обеспечивающие жесткую кинематическую связь между валом 6 и зубчатыми колесами 7 и 8, сидящие на осях 19 и выполненные в виде двуплечих рычагов.
Собачки 18 и упоры 15 имеют наклонные поверхности, в результате взаимодействия которых собачки 18 сжимают пружины 16, поворачивают упоры 15 и заходят под них.
Предлагаемый механизм предназначен для случая, когда за один ход реек требуется повернуть вал па 180°.
Механизм работает следующим образом. Рейки 3 со стяжками 4 перемещаются возвратно-поступательно между строго фиксированными крайними положениями в неподвижных направляющих 5.
При двпжении реек 3 зубчатые колеса 7 и 8 вращаются в противоположных направлениях и одно из них передает вращение валу 6, а другое вхолостую вращается иа валу.
При крайних положениях реек 3 зубчатые колеса 7 и 8 ио-разному расположены относительно храповых колес l2 и 13: зубчатое колесо 7, уже соверщившее при предыдущем ходе реек 3 передачу вращения валу 6 и которое при последующем ходе будет вращаться вхолостую относительно вала б, находится в таком положении относительно храпового колеса 12, что собачки 10 и 18, находящиеся на нем, плотно зацеиляются с храповььм колесом 12. Зубчатое колесо 8, которое при последующем ходе реек 3 будет передавать валу 6 вращение, повернуто на небольшой угол в направлении, противоиоложном направлению вращения вала 6 относительно того положения, когда собачки 10 и 18, расположенные на нем, плотно зацепляются с храповым колесом 13, причем собачка 18 полностью выведена из зацеилеиия в результате взаимодействия с упором 14.
Такое взаимное расположение собачек и храпового колеса достигается установлением необходимых крайних положений реек и обеспечивает в начале движения некоторый холостой ход, ири котором вал не вращается.
При движении реек 3 вниз ироисходит следующее. Собачка 10, расположенная на зубчатом колесе 7, которое при движении реек 3 вниз вращается на валу 6 вхолостую, выходит из паза храпового колеса 12 и проскальзывает по нему (на фиг. 1, 3 представлен механизм с крайним верхним положением реек). При крайнем нижнем положении реек 3 собачка 10 виовь западает в паз, но уже с иекоторым перебегом, так как зубчатое колесо 7, на котором она расположена, поворачивается относительно вала 6 на угол, несколько больший 360°: поворот колеса 7 при холостом ходе реек 3
плюс иоБорот вала 6 на 180° в направлении своего вращения плюс поворот колеса 7, вращающегося вхолостую, па 180° в противоиоложном направлении. Этот перебег обеспечит холостой ход в начале движения
вверх.
Собачка 18, расположенная на зубчато.м колесе 7, вращающемся на валу 6 вхолостую, в начале движения взаимодействует с упором 15, поворачивается на своей оси
10 и выходит из зацеплепия с храповым колесом 12, что становится возможным благодаря наличию холостого хода. При дальнейшем повороте собачка 18 выскакивает из-под упора 15 и прижимается к храповому колесу 12 пружиной 19, но в паз храпового колеса 12 уже не попадает, так как зубчатое колесо 7, на котором оно расположено, повернулось относительно вала. При подходе реек 3 к крайнему нижнему
положепию собачка 18, взаимодействуя с упором 14, отводится от храиового колеса 12 и ПС зацепляется с ним, что необходимо для того, чтобы собачка 10, расположенная на этом же колесе, совершила перебег отпосительпо паза храпового колеса, в который опа западает.
Зубчатое колесо 8, передающее валу 6 вращение ири движепии реек 3 вниз, в начале движения вращается вхолостую.
Собачка 10, расположеиная на нем, после того, как собачка 18, расположенная на зубчатом колесе 7, вышла из зацепления с храповым колесом 12, входит в плотное зацеплеппе с храповым колесом 13 и передает валу 6 вращение до крайнего нижнего иоложеиия реек.
Собачка 18, расположенная на этом же зубчатом колесе 8, в начале движения реек 3 вниз отходит от упора 14 и пружиной 19
вводится в зацепление с храповым колесом 13. В конце движения реек 3 вниз собачка 18 взаимодействует наклонной поверхностью с упором 15, сжимает пружипу 16, поворачивает упор 15 и заходит под
пего.
При движении реек 3 вверх зубчатые колеса 7 и 8 меняют направление своего вращения и собачки 10 и 18, расположенные на зубчатом колесе 8, совершают тот
же процесс, что и собачки 10, 18, расположенные на зубчатом колесе 7 при движении реек 3 вниз.
Поскольку зубчатые колеса 7, 8 передают валу 6 вращение поочередно, а при изменении направления движения реек 3 они также меняют направление своего вращения, то направление вращения вала 6 остается постоянным.
Использование изобретения в установке для нанесения рисунка на платы методом офсетной печати позволит повысить точность и качество нанесенного рисунка.
Формула изобретения
Механизм преобразования возвратнопоступательного прямолинейного движения в однонаправленное вращательное движение, содержащий корпус, две зубчатые рейки, соединенные между собой и перемещающиеся в неподвижных направляющих, вал, два свободно вращающихся на валу и взаимодействующих попеременно с рейками зубчатых колес с собачками, сидящими на осях, закрепленных на них, храповое колесо, жестко закрепленное на валу и взаимодействующее попеременно с собачками, отличающийся тем, что, с целью создания жесткой кинематической
связи между валом и зубчатыми колесами, он снабжен вторым храповым колесом, зубья которого встречно направлены к зубьям первого храпового колеса, двумя неподвижно установленными на корпусе и
двумя качающимися в плоскости торцов зубчатых колес упорами, дополнительными собачками в виде сидящих на осях, закрепленных на зубчатых колесах, двуплечих рычагов, каждая из которых взаимодействует соответственно одним плечом с одним из храповых колес, а другим - поочередно с неподвижным и качающимся упорами.
Источники информации, принятые во внимание при экспертизе
1.Патент Великобритании № 1336750. кл. F2Q, 1971.
2.Артоболевский И. И. Механизмы в современной технике, т. П1. М., «Наука,
1973, с. 48 (прототип).
А-Л
1 9 П 6
Фиг. 2
-Ю
.З

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ АЛИЕВЫХ | 2007 |
|
RU2349814C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ В НАПРАВЛЕННОЕ ВРАЩАТЕЛЬНОЕ | 1992 |
|
RU2036358C1 |
| Приспособление к прессам для автоматической толчковой подачи листового металла | 1933 |
|
SU32469A1 |
| Устройство для сборки | 1991 |
|
SU1757836A1 |
| Устройство для нанесения клея на кромки обувных деталей | 1988 |
|
SU1574202A1 |
| УСТРОЙСТВО ДЛЯ РАССТОЙКИ ТЕСТОВЫХ ЗАГОТОВОК В БЛОКАХ ФОРМ, НА ЛИСТАХ ИЛИ В ДРУГОЙ ТАРЕ | 1968 |
|
SU212189A1 |
| Прибор для определения качества хлопка по длине его волокна | 1929 |
|
SU24671A1 |
| Самоходная многоопорная оросительная машина | 1983 |
|
SU1147292A1 |
| Устройство для подачи длинномерногоМАТЕРиАлА B зОНу ОбРАбОТКи | 1979 |
|
SU804116A1 |
| Офсетная машина | 1979 |
|
SU867673A1 |