Изобретение относится к механизмам дистанционного управления наводкой и может быть использовано в противоградовых комплексах.
Известна установка, где шаговое наведение осуществляется постановкой этажерок, содержащих комплекты направляющих, расположенных под углом друг к другу, т. е. образующих веер, с фиксированием этажерок под углом вертикального наведения с использованием взаимодействий зубчаток оси и зубчаток этажерки.
Горизонтальное наведение осуществляется поворачиванием этажерок вместе с вертлюгом и фиксацией стопором с зубчатым диском колонки.
Это наведение позволяет за одну установку по углам вертикального и горизонтального наведений (наведение, произведенное одновременно с заряжением боекомплектом всех направляющих) произвести пуски, используя аккумулятор для воспламенения запалов при производстве пусков всего боекомплекта (ТКБ-040 ТОИЭ. Противоградовый комплекс "Алазань").
Известны также дистанционные системы управления наводкой, в которых используются электродвигатели, редукторы и т. д. в установках, где направляющие закреплены (или это предусмотрено) так, чтобы они образовывали веер, из-за допустимости случаев, когда может появиться необходимость произведения пусков со всего комплекта направляющих при отсутствии электроэнергии, необходимой для производства наводки и введения поправок к наводке в период между пусками (ТКБ-0183 ТО. Установка пусковая электромеханизированная для запуска противоградовых изделий, с. 17 и 66).
Однако направляющие закреплены так, чтобы они образовывали веер по горизонтали и по вертикали; при возрастании вертикального угла наводки ошибки возрастают, т. е. при увеличении вертикального угла наводки обстреливаемая область сужается по вертикали и растягивается по горизонтали. Системы дистанционного управления наводкой с использованием электродвигателей, редукторов и т. д. наряду с тем, что не дают точности по шагу (шаг, как правило, непостоянен, так как система сможет сработать в пределах любого из граничащих участков этого шага), требуют также подведения дополнительного источника электроэнергии, что является нежелательным в условиях горных местностей и вызывает необходимость транспортировать и держать согласно инструкции по эксплуатации блоки аккумуляторов. Очень неэффективно использование из-за неточности в наводке дорогостоящих противоградовых изделий.
Наиболее близким по существенным признакам к предлагаемому является шаговый механизм (Крайнев А.Ф. Словарь-справочник по механизмам. М. Машиностроение, 1987, с. 526), включающий анкерный (или мальтийский) механизм, в котором выходное звено совершает движение в одном направлении с периодическими остановками при одновременном движении входного звена. Этот механизм содержит реверсивный механизм, управляемый двумя сцепными муфтами, связывающими любое из двух конических колес с выходным валом. Другое управление это включение анкерного (или мальтийского) механизма, позволяющего с помощью двух электромагнитов получать шаговое перемещение выходного (вала) звена.
Однако шаговый механизм, содержащий анкерный (или мальтийский) механизм, создающий движение выходного звена (вала) в одном направлении с периодическими остановками и реверсивную коническую передачу с двумя сцепными муфтами, не дает необходимой точности, когда возникает необходимость расстрела облака при неоднонаправленном движении выходного вала, из-за неизбежного присутствия зазоров между коническими колесами и колесами, управляемыми анкерными (мальтийскими) механизмами с соответствующими зубчатыми колесами дифференциала.
В случае переноса зоны поражения на другое облако, отстоящее, например, на два десятка шагов, и возврата на первое облако такой механизм дает неудовлетворительные по точности результаты.
Использование реверсивной передачи для переноса огня на другое облако и обратно на первое еще более снижает точность наводки.
Цель предлагаемого изобретения увеличение точности наводки и осуществление наводки в системе дистанционного управления наводкой в период между пусками снарядов из всего комплекта параллельных направляющих с использованием энергии ранее сжатого упругого для вращения элемента, роль которого выполняет плоская спиральная пружина, взведение которой происходит одновременно с заряжением комплекта направляющих, с управлением от энергии маломощного аккумулятора, входящего в комплект установки для воспламенения электрозапалов при производстве пусков.
Цель достигается тем, что в системе дистанционного управления наводкой создан шаговый механизм наведения, где упругий для вращения элемент закреплен на валу, оканчивающемся конической шестерней, находящейся в зацеплении с двумя расположенными на валу-шестерне коническими зубчатыми колесами, контактирующими с валом-шестерней (червяком) через подпружиненные шпонки с примыкающими к ним штоками с толкателями электромагнитов.
На валу-шестерне (червяке) установлены две подвижные втулки, со шпоночными канавками, связанные двумя подпружиненными шарнирными четырехзвенниками с единой тягой электромагнита, причем втулки имеют связь с валом-шестерней (червяком) при фиксации их установленными на валу-шестерне (червяке) штифтами или с коническими зубчатыми колесами при западании выступов втулки в шпоночные канавки на торце конических зубчатых колес для их совместного вращения.
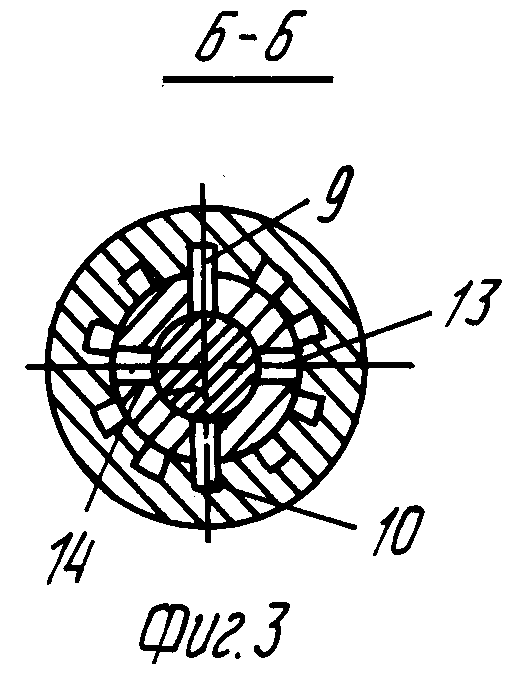
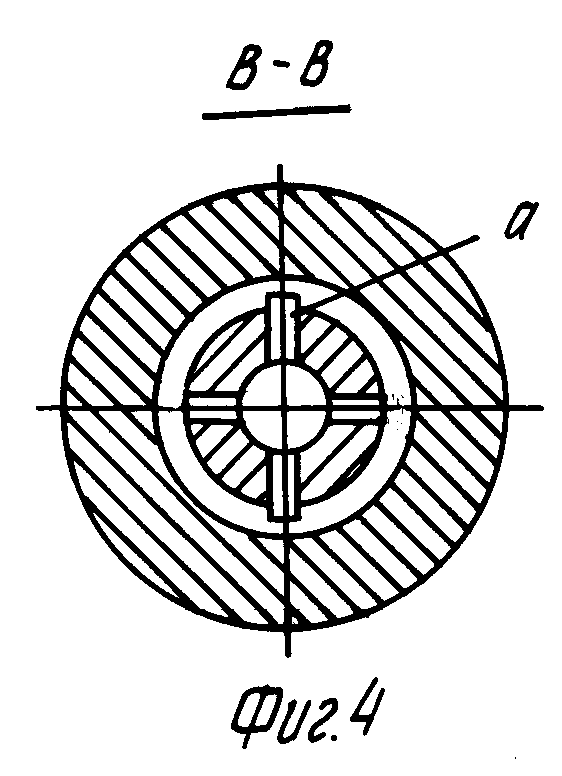
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 сечение А-А (по шпонкам) на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 1; на фиг. 4 сечение В-В на фиг. 1 в момент, когда втулка прижата и сцеплена с коническим зубчатым колесом; на фиг. 5 сечение Г-Г на фиг. 1 (управление втулками с помощью электромагнита); на фиг. 6 вид Д на фиг. 5 (управление втулками с помощью электромагнита); на фиг. 7 разрез Е-Е на фиг. 6 (скольжение подпружиненных шпонок по втулке в момент включения двух электромагнитов); на фиг. 8 вид Ж на фиг. 4 (сцепление втулок при их совместном вращении с валом-шестерней при точной наводке, выступ втулки западает с торца в шпоночные канавки конического зубчатого колеса).
Шаговый механизм с дистанционным управлением содержит шаговый механизм наведения, у которого на валу 1, оканчивающемся конической шестерней, помещен упругий для вращения элемент, роль которого выполняет плоская спиральная пружина 2, взведение которой происходит вручную. Взведенная пружина удерживается пальцем 3. Коническая шестерня сцеплена с двумя коническими зубчатыми колесами 5 и 6, установленными на валу-шестерне (червяке) 4. Подпружиненные выводящиеся шпонки 7, 8, 9 и 10 обеспечивают сцепление вала-шестерни (червяка) с коническими зубчатыми колесами 5 и 6. Шток 12 и толкатель электромагнита 11 имеют небольшой люфт.
На валу-шестерне 4 между двумя коническими зубчатыми колесами 5 и 6 дополнительно установлены две подвижные втулки 17 и 18, имеющие шпоночные канавки а, вырезы б для сцепления штифтом 19 на валу-шестерне (червяке), выступы в для сцепления их с коническими зубчатыми колесами и проточки 2 для взаимодействия с двумя симметричными подпружиненными (пружинами 20) шарнирными четырехзвенниками 21, 22, 23 и 24 с единой тягой 25, электромагнит 26, включающийся одновременно с электромагнитом 11 или электромагнитом 16.
Вращение вала-шестерни (червяка) на угол (шаг) точной наводки проходит в два этапа.
На первом этапе под действием электромагнита 11 на шток 12, имеющий на конце два симметричных клиновидных зацепа, один зацеп выводит из зацепления шпонки 9 и 10, при этом вал-шестерня (червяк) поворачивается и происходит его зацепление с коническим зубчатым колесом 6 через шпонки 13 и 14, освобожденные другим зацепом штока.
На втором этапе после окончания действия электромагнита 11 под действием пружины 15 шпонки 9 и 10 возвращаются, сцепляя вал-шестерню (червяк) с коническим зубчатым колесом и через шток выводя шпонки 13 и 14 из зацепления.
При повороте на угол (шаг) грубой наводки вала-шестерни (червяка) осуществляется дополнительное управление подпружиненными шпонками с помощью втулок 17 и 18, прижатых к коническим зубчатым колесам 5 и 6.
Под действием электромагнита 26 через единую тягу 25 и четырехзвенник 21, 22, 23 и 24 на проточки во втулках последние раздвигаются, расцепляясь с валом-шестерней (червяком) 4 и заходя имеющимися выступами в шпоночные канавки конических зубчатых колес 5 и 6, при одновременном действии электромагнита 26, например, с электромагнитом 16 происходит поворот на шаг при грубой наводке.
Чтобы поворот на угол (шаг) при точной наводке вал-шестерня (червяк) совершила в обратном направлении, необходимо воздействовать на электромагнит 16. Чтобы поворот на угол (шаг) совершился при грубой наводке, необходимо воздействовать одновременно на электромагнит 11 и электромагнит 26.
Особенность шагового механизма наводки с дистанционным управлением состоит в следующем:
работа механизма совершается от энергии упругого для вращения элемента, момент силы которого редуцируется увеличением через коническую и цилиндрическую (червячную) передачи;
вал, оканчивающийся шестерней, для создания знакопеременного вращения вала-шестерни (червяка) находится постоянно в зацеплении с двумя коническими зубчатыми колесами, расположенными на валу-шестерне (червяке) с двумя выводящимися подпружиненными шпонками; а расцепление вала-шестерни (червяка) с выводящимися подпружиненными шпонками с одним из конических зубчатых колес происходит под действием электромагнита или двух электромагнитов, в результате чего вал-шестерня (червяк) поворачивается на угол (шаг); для того чтобы поворот на угол (шаг) вал-шестерня (червяк) совершила в обратную сторону, необходимо воздействовать на другой электромагнит или на два электромагнита, т. е. расцепить вал-шестерню (червяк) с другим коническим колесом.
Технико-экономическая эффективность изобретения заключается в следующем.
Использование изобретения позволяет решить задачу по обеспечению наводки путем подачи импульса или серии импульсов тока к электромагнитам от энергии имеющегося в изделии аккумулятора.
В шаговом механизме наводки шаги точной и грубой наводки кратны, поэтому точность не теряется при реверсе во время переноса огня, т. е. можно поразить облако, перенести поражение на другое облако и вернуться для поражения первого и т. д.
Использование изобретения позволяет также получить автономную от подвода электроэнергии автомобильную легкую установку.
Кратность между шагами при грубой и точной наводке может быть равна десяти и при следующих выдерживаемых условиях:
число шпоночных канавок в конических зубчатых колесах равно 20 (или 40);
количество шпоночных канавок во втулках равно 2 (или 4);
угол в сечении вала-шестерни между подпружиненными шпонками равен 81о (или 85,5о) вместо показанного 90о;
использование двух шаговых механизмов наводки, при этом один шаговый механизм участвует в переносном движении относительно другого; один шаговый механизм имеет шаг точной наводки, равный 100 т. д. (т. д. тысячных дистанций угломера), а другой, рассчитанный на точность в одну т. д. вместо вала-шестерни имеет вал, оканчивающийся червяком, такое устройство удобно для создания настороженных систем автоматического дистанционного управления наводкой с использованием цифровых счетно-решающих и вычислительных машин, работающих по заданным программам, для надежного поражения целей при минимальных затратах дорогостоящих противоградовых изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ЭЛЕКТРОХИМИЧЕСКИХ ПРОЦЕССОВ | 1991 |
|
RU2015208C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ОБРАБАТЫВАЕМЫХ ИЗДЕЛИЙ | 1990 |
|
RU2034763C1 |
| Устройство для обвязки проволокой гибкого трубопровода | 1977 |
|
SU742320A2 |
| Приспособление для навивки пружин к токарному станку | 1988 |
|
SU1639849A1 |
| Пропашной культиватор | 2024 |
|
RU2833696C1 |
| Станок для шаговой подачи листовой резины на обработку | 1972 |
|
SU438547A1 |
| Станок-автомат для изготовления плетеной металлической сетки | 1957 |
|
SU118800A1 |
| УСТРОЙСТВО ДЛЯ РАСКЛАДКИ ПРОВОДА ПРИ НАМОТКЕ | 1992 |
|
RU2024089C1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2001 |
|
RU2205342C2 |





Изобретение относится к механизмам дистанционного управления наводкой и может быть использовано в противоградовых комплексах. Цель изобретения - повышение точности наводки и снижение веса и габаритов установки. Цель достигается за счет введения закрепленной на валу 1 с установленной на нем конической шестерней плоской спиральной пружины 2. Коническая шестерня на конце вала 1 кинематически связана с двумя расположенными на валу-шестерне 4 коническими зубчатыми колесами 5 и 6. Сцепление вала-шестерни 4 с коническими зубчатыми колесами 5 и 6 обеспечено под пружиненными шпонками 7, 8, 9 и 10, взаимодействующими с толкателями электромагнитов через штоки, например с толкателем электромагнита 11 через шток 12. На каждом конце вала-шестерни 4 установлены подвижная втулка со шпоночным канавками и взаимодействующий с ней штифт. Втулка снабжена подпружиненным шарнирным четырехзвенным механизмом, взаимодействующим с тягой электромагнита. 2 з.п. ф-лы, 8 ил.
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| М.: Машиностроение, 1987, с.526. |
