k
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения запечатываемого материала | 1975 |
|
SU654456A1 |
| Манипулятор | 1989 |
|
SU1685701A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Мальтийский механизм | 1982 |
|
SU1084521A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ С РЕГУЛИРУЕМОЙ СТЕПЕНЬЮ СЖАТИЯ | 2008 |
|
RU2382217C1 |
| Механизм позиционирования исполнительного органа | 1983 |
|
SU1114548A2 |
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Устройство для наплавки | 1973 |
|
SU478696A1 |
| Механизм подачи лесопильной рамы | 1986 |
|
SU1393638A1 |
Изобретение относится к машиностроению и может быть использовано в технологических комплексах для подачи листа в рабочую зону пресса при многорядной штамповке деталей из листа. Целью изобретения является расширение технологических возможностей за счет увеличения числа точек порционирования. Перемещение схвата 4 в продольном и поперечном направлениях относительно механической руки 3 происходит в шаговом режиме за счет наличия в передачах приводов мальтийских механизмов 9 и 23, через которые вращение от двигателей М 1 и М 2 передается посредством червячных передач на колеса зубчато-реечных передач, осуществляющих перемещения реек 5 и 15, связанных со схватом 4 во взаимно перпендикулярных направлениях. 2 ил.
ЭЯ
29 Ч Ю
20
. ./- //. / . // J2/
ода
п.
2Н
-24 -25
27
&
а о о ел
О
Изобретение относится к машиностроению и может быть использовано в технологических комплексах для подачи листа в рабочую зону пресса при многорядной штамповке деталей из листа.
Целью изобретения является расширение технологических возможностей за счет увеличения числа точек позиционирования.
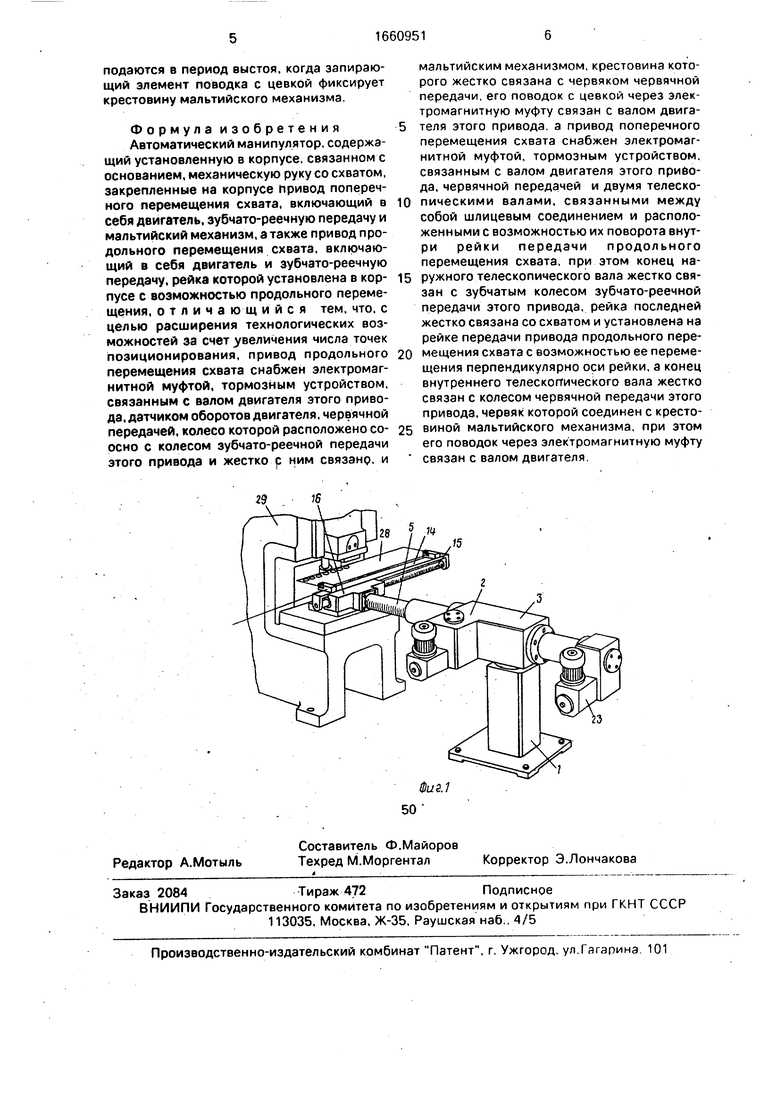
На фиг.1 изображен автоматический манипулятор, общий вид: на фиг.2 - кинематическая схема манипулятора.
Манипулятор содержит основание 1, на котором смонтирован корпус 2 механической руки 3, несущий схват 4. В корпусе 2 размещен привод продольного перемещения схвата. содержащий полый элемент 5, выполненный в виде зубчатой рейки, взаимодействующей с зубчатым колесом 6. Последнее закреплено на валу червячного колеса 7. взаимодействующего с червяком 8 и связанного с крестовиной мальтийского механизма 9, поводок с цевкой мальтийского механизма 9 через электромагнитную муфту 10 и конические зубчатые колеса 11 и
12связан с двигателем М 1. Кроме того, на валу поводка размещено тормозное устройство, например электромагнитный тормоз
13и датчик оборотов (не показан). Схват А закреплен на каретке 14 привода поперечного перемещения, которая связана с зубчатой рейкой 15, размещенной в направляющих 16. Внутри полого элемента 5 установлен с возможностью вращения полый вал 17, на одном конце которого закреплена шестерня 18, взаимодействующая с зубчатой рейкой 15. На другом конце вала 17 закреплена шлицевая втулка 19, образующая со шлицевым валом 20, связанным с червячным колесом 21, телескопическое соединение. Червяк 22. взаимодействующий с червячным колесом 21. связан через мальтийский механизм 23, электромагнитную муфту 24 и конические зубчатые колеса 25 и 26 с двигателем М 2, снабженным тормозным устройством, например электромагнитным тормозом 27. Позицией 28 обозначена обрабатываемая заготовка, а порцией 29 - пресс.
Автоматический манипулятор работает следующим образом.
Обрабатываемая заготовка 28 (лист) фиксируется в схвате 4 и подводится в зону штамповки пресса 29. После нажатия кнопки Пуск система управления манипулятора включает электродвигатели М 1 и М 2, срабатывают электромагнитные тормоза 13 и 27, при этом электромагнитные муфты 10 и 24 обесточены. Подается команда на рабочий ход пресса, при котором штампуется
(вырубается) первая деталь. В верхнем положении ползуна пресса 29 включается в работу привод поперечного перемещения. При этом отключается тормоз 27, включается муфта 24, передающая вращение от двигателя М 2, через поводок с цевкой и крестовину мальтийского механизма - червяку 22. Связанное с ним червячное колесо 21 посредством телескопического
соединения шлицевого вала 20 и полого вала 17 передает вращение шестерне 18, которая преобразует ее в поступательное перемещение зубчатой рейке и связанной с ней каретки 14 со схватом 4. За полный
оборот поводка с цевкой крестовина маль- дийского механизма совершает поворот на определенный угол с последующем высто- ем, обеспечивая этим дискретность перемещения заготовки 28 с заданным малым
шагом, в виду-большого передаточного отношения червячной пары 21 и 22. В зависимости от шага штамповки поводок с цевкой совершает заданное число оборотов и по команде датчика оборотов система управления обесточивает муфту 24, включая тормоз 27, и подает команду на последующий рабочий ход пресса. Цикл повторяется.
В крайнем положении каретки 14 система управления подает команду на включение привода продольной подачи. При этом отключается тормоз 13, включается электромагнитная муфта 10, передающая вращение от двигателя (VI 1 червячному колесу 7 через червяк 8 и мальтийский механизм 9. Шестерня 6, связанная с элементом 5 и закрепленная на валу червячного колеса 7, преобразует вращение в поступательное перемещение подвижной
части. Работа привода продольного перемещения аналогична работе привода поперечного перемещения. В зависимости от шага продольной подачи датчик отсчитывает заданное число оборотов поводка с
цевкой мальтийского механизма 9, по его команде система управления обесточивает муфту 10, включает тормоз 13 и реверсирует работу двигателя М 2. Далее подается команда на работу пресса, при
этом штампуется второй ряд деталей в обратном направлении. После окончания штамповки двигатель М 1 реверсируется и подвижная часть механической руки 3 возвращается в исходное положение.
Наличие мальтийских механизмов в приводах обеспечивает высокую точность продольной и поперечной подачи. Кроме того, время срабатывания электромагнитных муфт и тормозов может колебаться в широких пределах, так как управляющие сигналы
подаются в период выстоя. когда запирающий элемент поводка с цевкой фиксирует крестовину мальтийского механизма.
Ф о р м у л а и з о б р е т е н и я
Автоматический манипулятор, содержащий установленную в корпусе, связанном с основанием, механическую руку со схватом, закрепленные на корпусе привод поперечного перемещения схвата, включающий в себя двигатель, зубчато-реечную передачу и мальтийский механизм, а также при вод продольного перемещения схвата, включающий в себя двигатель и зубчато-реечную передачу, рейка которой установлена в кор- пусе с возможностью продольного перемещения, отличающийся тем, что. с целью расширения технологических возможностей за счет увеличения числа точек позиционирования, привод продольного перемещения схвата снабжен электромагнитной муфтой, тормозным устройством, связанным с валом двигателя этого привода, датчиком оборотов двигателя, червячной передачей, колесо которой расположено со- осно с колесом зубчато-реечной передачи этого привода и жестко р ним связанр, и
мальтийским механизмом, крестовина которого жестко связана с червяком червячной передачи, его поводок с цевкой через электромагнитную муфту связан с валом двигателя этого привода а привод поперечного перемещения схвата снабжен электромагнитной муфтой, тормозным устройством, связанным с валом двигателя этого привода, червячной передачей и двумя телескопическими валами, связанными между собой шлицевым соединением и расположенными с возможностью их поворота внутри рейки передачи продольного перемещения схвата, при этом конец наружного телескопического вала жестко связан с зубчатым колесом зубчато-реечной передачи этого привода, рейка последней жестко связана со схватом и установлена на рейке передачи привода продольного перемещения схвата с возможностью ее перемещения перпендикулярно оси рейки, а конец внутреннего телескопического вала жестко связан с колесом червячной передачи этого привода, червяк которой соединен с крестовиной мальтийского механизма, при этом его поводок через электромагнитную муфту связан с валом двигателя
т
15
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
