ч
Ё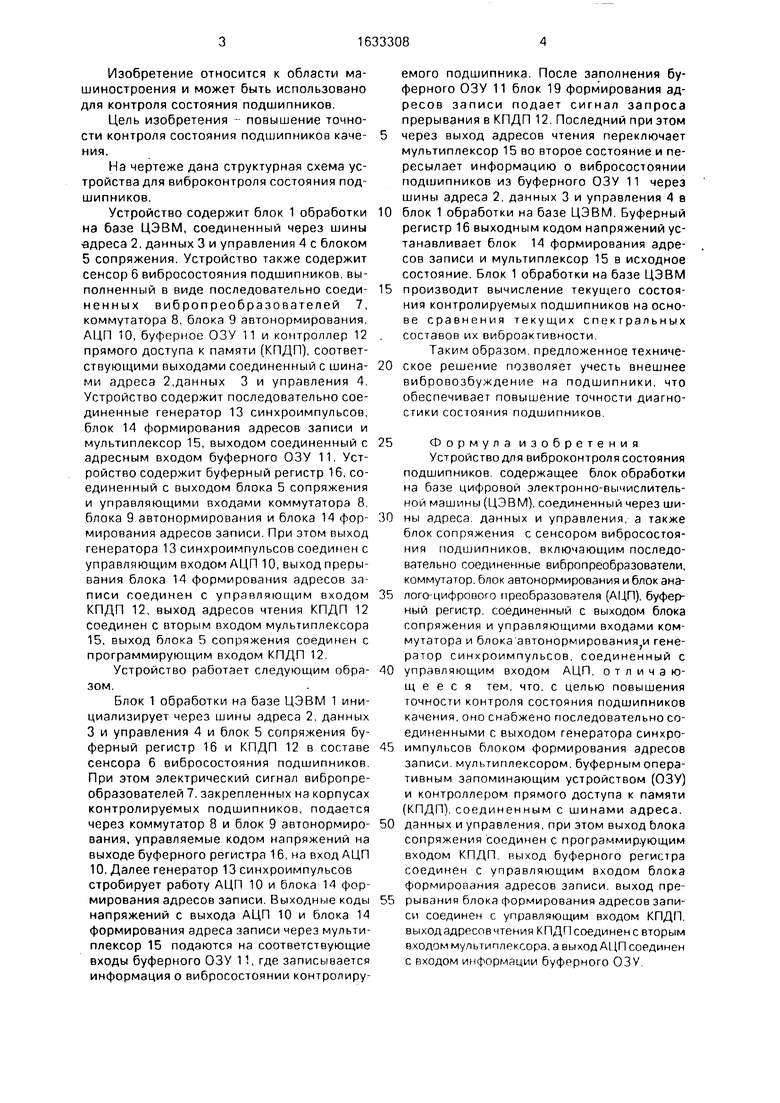
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прогнозирования ресурса подшипников качения | 1987 |
|
SU1425507A1 |
| СЕНСОР ДИАГНОСТИКИ УЗЛОВ ТРЕНИЯ КАЧЕНИЯ | 1992 |
|
RU2036455C1 |
| СЕНСОР ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1992 |
|
RU2036454C1 |
| Устройство для ввода информации от аналоговых датчиков | 1988 |
|
SU1578706A1 |
| Устройство для анализа вызванных потенциалов головного мозга | 1990 |
|
SU1804787A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ | 1994 |
|
RU2108623C1 |
| Устройство для ввода и вывода изображений объектов | 1990 |
|
SU1829045A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЧЕТЫРЕХПОЛЮСНИКА | 1992 |
|
RU2065667C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
Изобретение относится к машиностроению и может быть использовано для контро- ля состояния подшипников Цель изобретения - повышение точности контроля состояния подшипников качения Блок обработки на базе ЦЭВМ 1 инициализирует через шины 2-4 и блок 5 сопряжения буферный регистр 16, коммутатор 8, блок 9 автонормирования и контроллер прямого доступа к памяти (КПДП) 12 в составе сенсора вибросостояния подшипников 6. При этом электрический сигнал вибропреобразователя 7 поступает на вход АЦП 10, далее через буферное ОЗУ 11 и КПДП 12 в блок обработки на базе ЦЭВМ 1, где выполняются операции по определению состояния подшипников Генератор 13 синхроимпульсов тактирует работу АЦП 10, блока 14 формирования адресов записи, мультиплексора 15 и КПДП 12 1 ил
О
со со
СА) О 00
Изобретение относится к области машиностроения и может быть использовано для контроля состояния подшипников.
Цель изобретения - повышение точности контроля состояния подшипников качения.
На чертеже дана структурная схема устройства для виброконтроля состояния подшипников.
Устройство содержит блок 1 обработки на базе ЦЭВМ, соединенный через шины адреса 2, данных 3 и управления 4 с блоком 5 сопряжения. Устройство также содержит сенсор 6 вибросостояния подшипников, выполненный в виде последовательно соединенных вибропреобразователей 7, коммутатора 8, блока 9 автонормирования, АЦП 10, буферное ОЗУ 11 и контроллер 12 прямого доступа к памяти (КПДП), соответствующими выходами соединенный с шинами адреса 2,данных 3 и управления 4. Устройство содержит последовательно соединенные генератор 13 синхроимпульсов, блок 14 формирования адресов записи и мультиплексор 15, выходом соединенный с адресным входом буферного ОЗУ 11. Устройство содержит буферный регистр 16, соединенный с выходом блока 5 сопряжения и управляющими входами коммутатора 8. блока 9 автонормирования и блока 14 формирования адресов записи. При этом выход генератора 13 синхроимпульсов соединен с управляющим входом АЦП 10, выход прерывания блока 14 формирования адресов записи соединен с управляющим входом КПДП 12, выход адресов чтения КПДП 12 соединен с вторым входом мультиплексора 15, выход блока 5 сопряжения соединен с программирующим входом КПДП 12.
Устройство работает следующим образом.
Блок 1 обработки на базе ЦЭВМ 1 инициализирует через шины адреса 2, данных 3 и управления 4 и блок 5 сопряжения буферный регистр 16 и КПДП 12 в составе сенсора 6 вибросостояния подшипников. При этом электрический сигнал вибропреобразователей 7. закрепленных на корпусах контролируемых подшипников, подается через коммутатор 8 и блок 9 автонормирования, управляемые кодом напряжений на выходе буферного регистра 16, на вход АЦП 10. Далее генератор 13 синхроимпульсов стробирует работу АЦП 10 и блока 14 формирования адресов записи. Выходные коды напряжений с выхода АЦП 10 и блока 14 формирования адреса записи через мультиплексор 15 подаются на соответствующие входы буферного ОЗУ 11, где записывается информация о вибросостоянии контролируемого подшипника. После заполнения буферного ОЗУ 11 блок 19 формирования адресов записи подает сигнал запроса прерывания в КПДП 12. Последний при этом
через выход адресов чтения переключает мультиплексор 15 во второе состояние и пересылает информацию о вибросостоянии подшипников из буферного ОЗУ 11 через шины адреса 2, данных 3 и управления 4 в
блок 1 обработки на базе ЦЭВМ. Буферный регистр 16 выходным кодом напряжений устанавливает блок 14 формирования адресов записи и мультиплексор 15 в исходное состояние. Блок 1 обработки на базе ЦЭВМ
производит вычисление текущего состояния контролируемых подшипников на основе сравнения текущих спектральных составов их виброактивности.
Таким образом, предложенное техническое решение позволяет учесть внешнее вибровозбуждение на подшипники, что обеспечивает повышение точности диагностики состояния подшипников.
Формула изобретения
Устройство для виброконтроля состояния подшипников, содержащее блок обработки на базе цифровой электронно-вычислительной машины (ЦЭВМ), соединенный через шины адреса, данных и управления, а также блок сопряжения с сенсором вибросостояния подшипников, включающим последовательно соединенные вибропреобразователи, коммутатор, блок автонормирования и блок аналого-цифрового преобразователя (АЦП), буферный регистр, соединенный с выходом блока сопряжения и управляющими входами коммутатора и 6лока автонормирования;и генератор синхроимпульсов, соединенный с
управляющим входом АЦП, отличающееся тем. что, с целью повышения точности контроля состояния подшипников качения, оно снабжено последовательно соединенными с выходом генератора синхро5 импульсов блоком формирования адресов записи мультиплексором, буферным оперативным запоминающим устройством (ОЗУ) и контроллером прямого доступа к памяти (КПДП), соединенным с шинами адреса.
0 данных и управления, при этом выход блока сопряжения соединен с программирующим входом КПДП, выход буферного регистра соединен с управляющим входом блока формирования адресов записи, выход пре5 рывания блока формирования адресов записи соединен с управляющим входом КПДП, выход адресов чтения КПДП соединен с вторым входом мультиплексора, а выход АЦП соединен с входом информации буферного ОЗУ
| Устройство для прогнозирования ресурса подшипников качения | 1987 |
|
SU1425507A1 |
