14
Изобретение относится к подшипниковой промьшшенности и может быть.использовано при контроле состояния подшипников качения в процессе эксплуатации.
Цель изобретения - повьш1ение качества испытаний за счет расширения диапазона измеряемых хара :теристик повреткдеиий в подшипнир;ах качения,
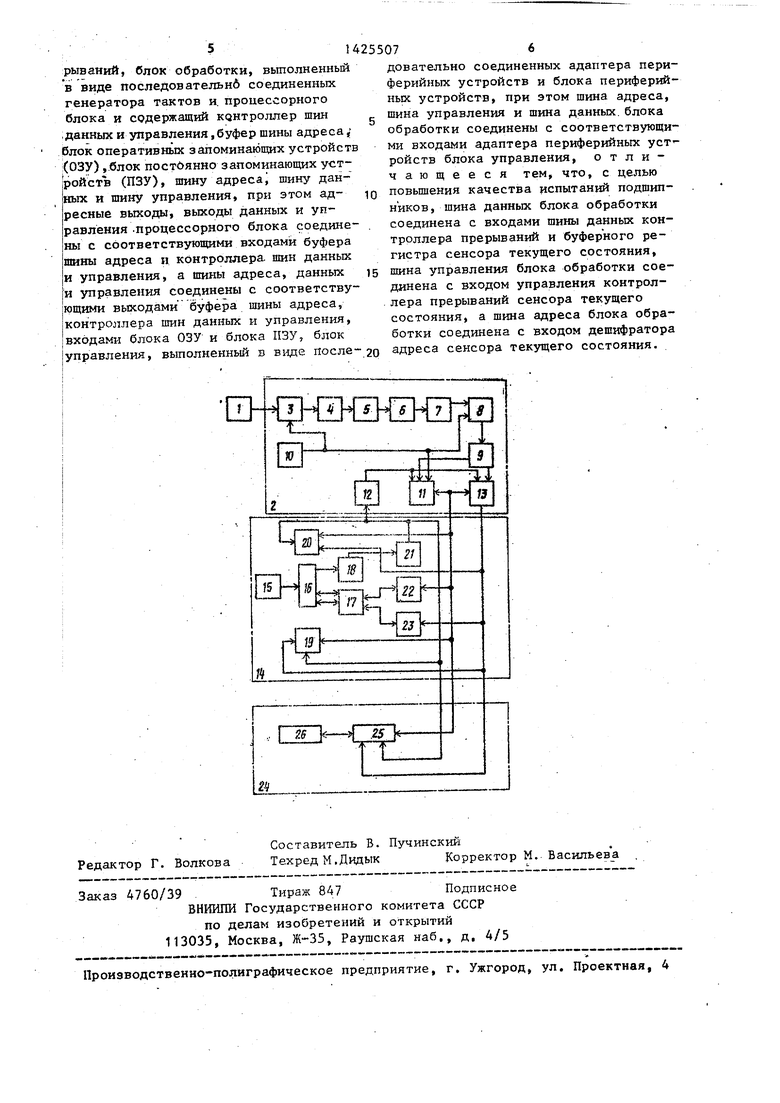
На чертеже дана схема предлагаемого, устройства.
Устройство содержит блок 1 вибропреобразователей и сенсор 2 текущего состояния, выполненный в виде последовательно соединенньпс с выходом блока 1 вибропреобразователей, коммута- .тора 3, предусилителя 4, блока 5 ав- гономирования, блока 6 фильтра высших частот, блока 7 частотной характеристики, пикового.детектора 8 и . АЩ1 9.
Сенсор 2 текущего состояния содержит генератор 10 тактовых тшуль- сов и буферный регистр П, при этом выход генератора 10 тактовых импульсов соединен с входом установки нуля пикового детектора 8, входом переключения коммутатора 3, входом запуска АЦП 9 и входом состояния генератора тактовьгх импульсов в буферном регистре 11, дешифратор 12 адреса и контроллер 13 прерываний, при этом выход дешифратора 12 адреса соединен с адресным входом буферного регистра 11 и входом адреса контроллера 13 прерываний, выход готовности преобразования АЦП 9 соединен с входом запроса прерывания контроллтера 13 прерываний .
Устройство содержит блок 14 обработки, вьшолненный в виде последовательно соединенных генератора 15 тактов и процессорного блока 16, содержащий контроллер 7 шин данных и управления, буфер 18 щины адреса, блок ОЗУ 19, блок ПЗУ 20, шину 21 адреса, шину 22 данных, шину 23 управления, при этом адресные выходы, выходы данных и выходы управления процессорного блока 16 соединены соответственно с входами буфера 18 шины адреса и контроллера 17 шин данных и управления, а шина 21 адреса, шина 22 данных и шина 23 управления соединены соответственно с выходом буфера 18 шины адреса, выходами контроллера 17 шин данных и управления, а также адресными, управления и ин
to
5
0
5
0
формационными входами блока ОЗУ 1 9 и блока ПЗУ 20.
Устройство содержит блок 24 управления, вьтолненный в виде -последовательно соединенных адаптера 25 периферийных устройств и блока 26 периферийных устройств, при этом шина 21 адреса, шина 22 данных и шина 23 управления блока 14 обработки соединены с соответствующими входами - адаптера 25 периферийных устройств ; в составе блока 24 управления, шина 21 адреса соединена с дешифратором 12 адреса, шина 22 данных и шина 23 управления соединены с заданными входами контроллера 13 прерьшаний, а шина 22 данных соединена с выходом данных буферного регистра 11 в составе сенсора 2 текущего состояния.
Устройство работает следующим образом.
Блок 24 периферийных устройств выраба;тывает потенциалы управляющих напряжений, которые с выходов блока о 26 периферийных устройств, например дисплея, через адаптер 25 периферийных устройств, шину 22 данных и шину 23 управления поступают в блок 14 обработки. Последний за счет наличия импульсов напряжения генератора 15 тактов, инициализирует процессорньй блок 16. Процессорный блок 16 пересылает при этом потенциалы управляющих напряжений блока 24 управления в блок ОЗУ 19 с помощью шины 21 адреса, шины 22 данных и шины 23 управления, а также буфера 18 шины адреса и кон- треллера 17 шин данных и управления. Блок ОЗУ 19 хранит заданные потенциалы управления.
Далее электрический сигнал блока 1 вибропреобразователей, закрепленного на корпусах испытываемых подшипников качения, поступает на вход сенсора 2 текущего состояния, где проходит через коммутатор 3, усиливается в предусилителе 4, автонормируется по величине среднего квадратического или абсолютного значения в блоке 5 0 автонормирования,фильтруется до заданного среднего квадратического или абсолютного значения высших частот в блоке 6 фильтра высших частот, усиливается по заданной зависимости в блоке 7 частотной характеристики и поступает на вход пикового детектора 8. Пиковый детектор 8 регистрирует экстремум входного сигнала блока 1 вибро5
0
5
5
преобразователей, пропорциональный величине ударного взаимодействия тел качения о дефекты (повреждения) в контролируемом подшипнике и соответственно пропорциональный глубине повреждений (дефектов).
Далее АЦП 9 преобразует выходное напряжение пикового детектора 8 в код напряжений, который подается на заданный вход буферного регистра 11,
Генератор 10 тактовых импульсов синхронизирует работу коммутатора 3, пикового детектора 8, АЦП 9 и вырабатывает код напряжений о состоянии коммутатора 3, которьн подается на вход состояния генератора }0 тактовы импульсов в буферном регистре 11.
Одновременно с выхо да готовности
процессорный блок 16 пересьтает коды напряжений о соответствующем типе дефектов и остаточном ресурсе из блока
ПЗУ 20 в блок 26 периферийных устройств (например, принтер) за счет импульсов напряжений, передаваемых процессорньш блоком 16 через буфер 18 шииь: адреса, контроллер 17 шин
данных и управления, шину 21 адреса, пшну 22 данных, шину 23 управления и адаптер 25 периферийных устройств в составе блока 24 уп$)авления. .
Таким образом, сравнивается ранее
полученная информация о характере изменения контролируемого параметра вибрации испытьгеаемых подшипников, установленном ранее виде дефекта, например образивном износе, устало

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики подшипников | 1987 |
|
SU1448232A1 |
| Устройство для прогнозирования остаточного ресурса подшипников качения | 1987 |
|
SU1439441A1 |
| Устройство для виброконтроля состояния подшипников | 1989 |
|
SU1633308A1 |
| УПРАВЛЯЮЩАЯ ЭВМ | 2005 |
|
RU2316807C2 |
| АБОНЕНТСКИЙ ПУНКТ В СИСТЕМЕ БЕСПРОВОДНОЙ ЦИФРОВОЙ ТЕЛЕФОННОЙ СВЯЗИ | 1990 |
|
RU2154360C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕЛЕВИЗИОННЫХ ОПТИЧЕСКИХ СИСТЕМ | 1991 |
|
RU2010448C1 |
| ТРЕХКАНАЛЬНАЯ РЕЗЕРВИРОВАННАЯ УПРАВЛЯЮЩАЯ СИСТЕМА | 2008 |
|
RU2387000C1 |
| АБОНЕНТСКИЙ ПУНКТ В АБОНЕНТСКОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 1990 |
|
RU2138122C1 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА НА БАЗЕ МАТРИЦЫ ПРОЦЕССОРНЫХ ЭЛЕМЕНТОВ | 1998 |
|
RU2117326C1 |
| Устройство для управления считыванием и вводом информации | 1990 |
|
SU1751786A1 |
Изобретение относится к подшип- : никам и м.б. использовано при контроле состояния подшипников качения в процессе эксплуатации. Цель - повышение качества испытаний подшипников. Электрический сигнал с вибропреобразователя, закрепленного на корпусе контролируемого подшипника качения, после усиления поступает в сенсор текущего состояния, на -вьио- дах которого вырабатываются коды на.- пряжения, пропорциональные максимальной глубине и объему.повреждений. При этом на выходе счетчика формируется код напряжения (КН), пропорцио- нальньй объему повреждений на телах качения. Далее КН с выходов сенсора текущего состояния подается на соответствующие входы блока остаточного ресурса и прогнозирования наработки. Блок распределения текущего состояния производит регистрацию распределения информативных амплитуд по времени, за счет чего синтезируется образ разрушения контролируемого подшипника, заносимый в блок данных. При совпадении вырабатывается потенциал КН на входе мажоритарного блока. .Информация с блока данных поступает через мультиплексор на блок деления, где формируются коды величины остаточного ресурса. С выходов мажоритарного блока, блока деления и блока регистрации прогнозируемого состояния и блока прогнозирования наработки КН поступают в схему согласования, где происходит согласование их уровней с уровнями -индикатора, котот , рый производит печать и индикацию остаточного ресурса и прогнозируемого времени наработки. I ил. i О) С to ел ел
преобразования АЦП 9 потенциал напря- 2о стном выкрашивании или недостаточножения поступает на вход запроса прерывания контроллера 13 прерываний. Последний через шину 23. управления и шину 22 данных сообщает блоку 14 обработки о готовности данных АЦП 9. При этом в блоке 14 обработки за сче потенциалов генератора 15 тактов, инициализируется процессорньй блок 16, контроллер 17 шин дайных и управления, буфер 18 шины адреса, блок 19 ОЗУ, шина 21 адреса, шина 22 данных и шина 23 управления, за счет чего через дешифратор 12 адреса поступают потенциалы напряжений на адресные входы буферного регистра 11 f. контро ллера I 3 прерываний, последний отключается от шины 22 данных, и потенциалы напряжений с выхода буферного регистра 11 переносят 5Я в блок ОЗУ 19, Таким образом, блок 14 обработки воспринимает информацию в виде кодов напряжений о текущем состоянии контролируемого подшипника.
Далее процессорньй блок 16 за счет импульсов генератора 15 тактов инициализирует контроллер 1 7 шин данных и управления буфер 18 шины адреса и через, штину 21 адреса и шину 23 управления - блок ОЗУ 19 и блок ПЗУ 20. При этом занесенные ранее в блок ПЗУ 20 коды напряжений сравниваются процессорным блоком 16 с кодами напряжений о состоянии контролируемого подшипника, записанными в блоке ОЗУ 19. При совпадении заданного числа кодов с заданной ошибкой в блоке ОЗУ 19 и записанных кодов о состоянии подшипников, ранее контролируемых в блоке ПЗУ 20,
сти смазки, а также соответствующем ресурсе., с вновь поступающей информацией о регистрируемом параметре вибрации, на основе чего предлагав- мое устройство вырабатывает, данные i об ожидаемом виде дефекта и ресурсе контролируемого подшипника качения.
Предлагаемое устройство позволяет повысить качество испытаний подшипников.
5
0
5
0
5
Формула изобретения
Устройство для прогнозирования ресурса подшипников качения, содержащее последовательно соединенные блок вибропреобразователей и сенсор текущего состояния, выполненный в виде последовательно соединенных с выходом блока вибропреобразователей ком гутатора, предусилителя, блока автонорнирования, блока фильтра вые-. ших частот, блока частотной характеристики, пикового детектора и аналого-цифрового преобразования (АЦП) и содержащий буферный регистр, генера--i тор тактовых импульсов, выходом сое- динеиный с входом установки нуля пикового детектора, входом переключения комментатора, входом запуска АДП и входом состояния гензратора тактовых импульсов в буферном регистре, дешифратор адреса и контроллер прерываний, при этом выход дешифратора адреса соедкчек с адресным входом буферного регистра и входом адреса контроллера прерываний, выход готовности преобразователя АЦП соединен с входом запроса прерывания контроллера пре рываний, блок обработки, вьшолненный в виде последовательнб соединенных генератора тактов и. процессорного блока и содержащий контроллер шин данных и управления,буфер шины адреса, блок оперативных запоминающих устройств (ОЗУ) ,.блок постоянно запоминающих уст- тройств (ПЗУ), шину адреса) шину дан- |ных и шину управления, при этом ад- ресные выходы, выходы данных и управления .процессорного блока соедине- |ны с соответствующими входами буфера шины адреса и контроллера шин данных и управления, а шины адреса, данных И управления соединены с соответству ющими выходами буфера шины адреса, контроллера шин данных и управления, входами блока ОЗУ и блока ПЗУ, блок управления, выполненный в виде последовательно соединенных адаптера периферийных устройств и блока периферийных устройств, при этом шина адреса, шина управления и шина данных, блока обработки соединены с соответствующими входами адаптера периферийных уст ройств блока управления, отличающееся тем, что, с целью повьш1ения качества испытаний подшипников, шина данных блока обработки соединена с входами шины данных контроллера прерываний и буферного регистра сенсора текущего состояния, шина управления блока обработки соединена с входом управления контроллера прерываний сенсора текущего состояния, а шина адреса блока обработки соединена с входом дешифратора адреса сенсора текущего состояния.
| Устройство для вибрационной диагностики состояния подшипников качения | 1983 |
|
SU1174811A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| I | |||
