Изобретение относится к автоматике, вычислительной технике и может быть использовано для определения положения подвижных объектов, например летательных аппаратов, судов, автомобилей.
Известен способ определения координат подвижного указателя, включающий установку не менее трех датчиков волнового сигнала в заранее известных точках, периодическое всенаправленное излучение кодированного волнового сигнала излучателем, прием этого сигнала всеми датчиками, передача сигналов от каждого датчика в центр обработки информации, идентификация сигналов центром обработки информации, определение центром обработки информации разностей времен прихода между сигналами, вычисление по этим разностям местоположения объекта [1]
Наиболее близким к изобретению является способ определения положения подвижного объекта, включающий установку излучателя волнового сигнала и не менее двух датчиков в заранее известных точках, установку центра обработки информации, состоящего из приемника волнового сигнала и вычислителя, на объекте, периодическое всенаправленное излучение волнового сигнала излучателем, прием датчиками сигнала излучателя, инициирующего излучение маркерных сигналов датчиков, прием сигналов излучателя и датчиков в центре обработки информации, определение центром обработки информации разностей времен прихода между сигналом излучателя и сигналами датчиков, вычисление по этим разностям местоположения объекта [2]
Сущность изобретения состоит в том, что заранее задают последовательность срабатывания датчиков, после приема кодированного волнового сигнала первым датчиком формируют маркерный сигнал первого датчика, который передают на следующий в последовательности датчик и в центр обработки информации. На каждом датчике принимают маркерный сигнал предыдущего датчика, формируют свой маркерный сигнал и передают на следующий датчик и в центр обработки информации последовательно принимают маркерные сигналы всех датчиков и кодированный волновой сигнал излучателя, после чего идентифицируют все принятые сигналы в центре обработки информации, разность времен прихода определяют между сигналом излучателя и маркерным сигналом каждого датчика, а также между маркерными сигналами пар датчиков, вычисляют по этим разностям местоположение объекта.
Это позволяет повысить точность вычисления местоположения объекта, повысить мобильность системы, установить датчики в местах, где кабельная связь между ними и центром обработки информации либо невозможна, либо труднореализуема.
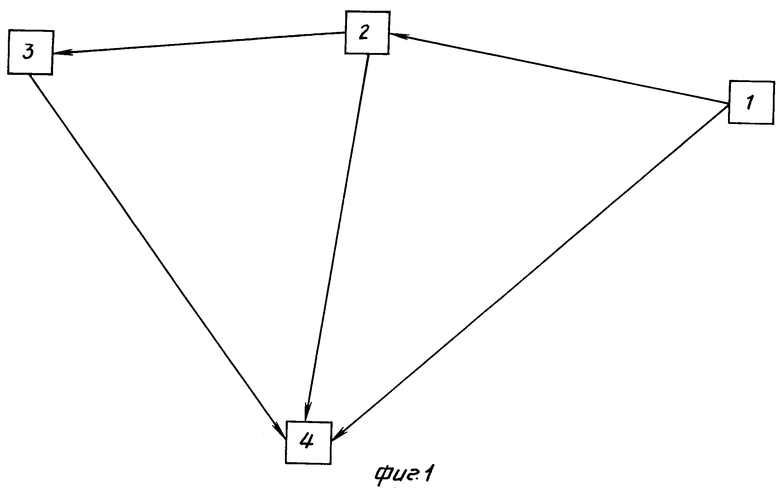
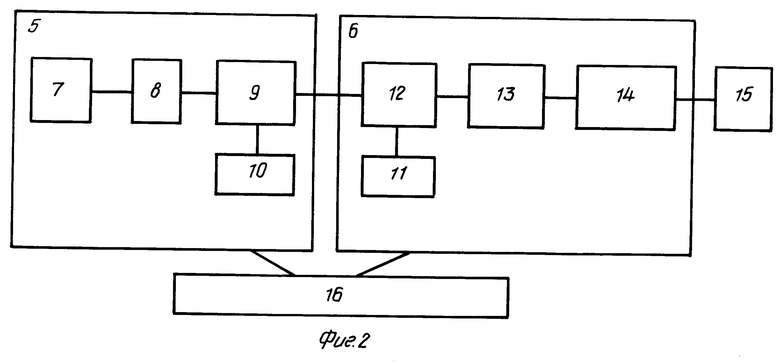
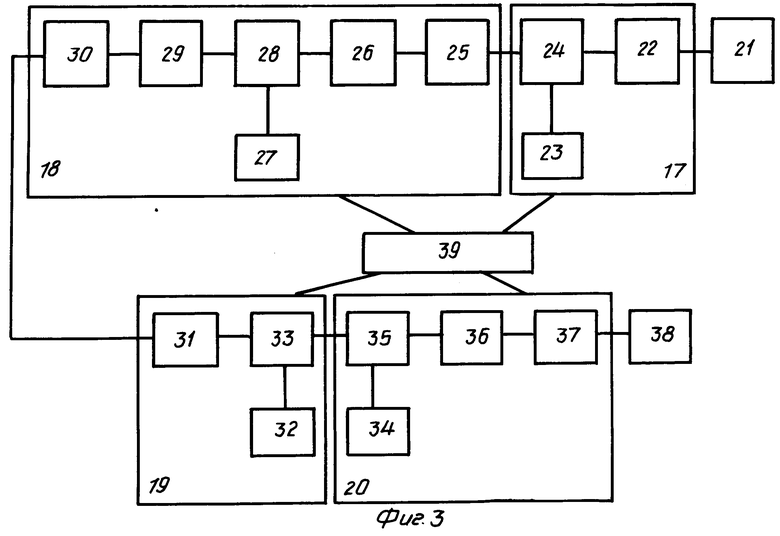
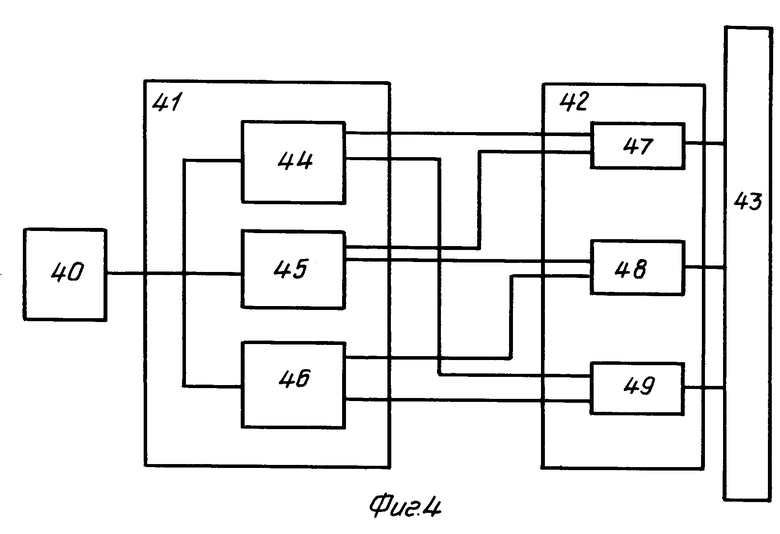
На фиг. 1 изображен пример взаимного расположения излучателя волнового сигнала 1, датчиков 2, 3, центра 4 обработки информации; на фиг.2 схема возможной реализации излучателя волнового сигнала задающего радиомаяка; на фиг.3 схема возможной реализации датчика переизлучающего радиомаяка; на фиг. 4 схема возможной реализации центра обработки информации.
Предлагаемый способ в применении к распознаванию местоположения летательного аппарата может быть реализован следующим образом.
Излучатель волнового сигнала задающий радиомаяк дециметрового диапазона, излучающий фазокодоманипулированный сигнал (см. фиг.2), состоит из модуля 5 формирователя сигнала, СВЧ-модуля 6 передатчика, которые, в свою очередь, состоят из таймера 7, периодически запускающего радиомаяк, блока 8 постоянной памяти, фазового модулятора 9, генератора 10 опорного напряжения, генератора 11 несущей частоты, смесителя 12, полосового фильтра 13, усилителя 14, штыревой антенны 15, источника питания 16.
Датчик переизлучающий радиомаяк со своим маркерным сигналом (см. фиг.3) состоит из СВЧ-модуля 17 приемника, модуля 18 оптимального обнаружителя, модуля 19 формирователя сигнала, СВЧ-модуля 20 передатчика, которые в свою очередь состоят из штыревой антенны 21, усилителя-ограничителя 22, генератора 23 несущей частоты, смесителя 24, полосового фильтра 25, усилителя-ограничителя 26, генератора 27 опорного напряжения, фазового демодулятора 28, согласованного фильтра 29, блока 30 сравнения с порогом, блока 31 постоянной памяти кода данного маяка, генератора 32 опорного напряжения, фазового модулятора 33, генератора 34 несущей частоты, смесителя 35, полосового фильтра 36, усилителя 37, штыревой антенны 38, источника питания 39.
Центр обработки информации приемник радиосигналов задающего радиомаяка и переизлучающих радиомаяков, многоканальный измеритель разностей времен прихода сигналов, ЦВМ. Центр обработки информации (см. фиг.4) состоит из СВЧ-модуля 40 приемника, модуля 41 оптимального обнаружения, модуля 42 измерителя разности времен прихода сигналов, ЦВМ 43.
Модуль 41 состоит из набора одинаковых модулей оптимального обнаружения сигналов задающего радиомаяка 44, переизлучающих радиомаяков 45, 46.
Модули 44, 45, 46 отличаются только настройкой согласованных фильтров под свои сигналы. Состав модулей 44, 45, 46 идентичен составу модуля 18, состав модуля 40 составу модуля 17.
Модуль 42 состоит из набора идентичных измерителей разности времени прихода сигналов 47, 48, 49.
Аппаратура работает следующим образом. В задающем радиомаяке сигнал таймера 7 разрешает считывание с блока 8 хранящегося в нем кода, код поступает на фазовый модулятор 9, на который подается сигнал с генератора 10 опорного напряжения.
В фазовом модуляторе 9 формируется фазокодоманипулированный сигнал, который подается на смеситель 12, сигнал с генератора 11 несущей частоты также подается на смеситель 12, в котором происходит перенос сигнала на несущую частоту. С выхода смесителя сигнал подается на полосовой фильтр 13, который отфильтровывает сигнал с зеркальной частотой. С выхода фильтра 13 сигнал подается на усилитель 14, где усиливается и поступает на штыревую антенну 15, с которой происходит всенаправленное излучение фазокодоманипулированного радиосигнала. Источник 16 питания обеспечивает требуемые значения напряжения и частоты тока.
В переизлучающем радиомаяке фазокодоманипулированный радиосигнал принимается на штыревую всенаправленную антенну 21, снимаемый с антенны сигнал подается на усилитель-ограничитель 22, с выхода которого усиленный и ограниченный сигнал подается на смеситель 24, на который также подается сигнал с генератора 23 несущей частоты.
В смесителе 24 сигнал переносится на промежуточную частоту. С выхода смесителя 24 сигнал подается на полосовой фильтр 25, где фильтруется сигнал с зеркальной частотой. С выхода полосового фильтра сигнал подается на усилитель-ограничитель 26, с выхода которого сигнал подается на фазовый демодулятор 28, на который также подается сигнал с генератора 27 опорного напряжения.
В фазовом демодуляторе 28 выделяется кодовый сигнал на видеочастоте. С выхода фазового демодулятора 28 сигнал подается на согласованный фильтр 29, сигнал с выхода которого подается в блок 30 сравнения с порогом. При превышении порога в блоке 30 формируется импульс, который поступает в блок 31, аналогичный блоку 8, постоянной памяти кода данного маяка.
Дальнейшая работа идентична работе блоков 9-15. Источник питания 39 обеспечивает требуемые значения напряжения и частоты тока.
В центре обработки информации радиосигналы принимаются и обрабатываются в модулях 40 и 41 идентично приему и обработке в модулях 17, 18. С выходов модулей сигналы попарно подаются на измерители 47, 48, 49 разностей прихода сигналов. Измеренные разности времен прихода сигналов подаются на ЦВМ, где по ним вычисляются координаты центра обработки информации, а следовательно, самого летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2060513C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 1995 |
|
RU2096829C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2018858C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2012 |
|
RU2507555C2 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2005 |
|
RU2301437C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2389054C1 |
| СПОСОБ И СИСТЕМА ОТСЛЕЖИВАНИЯ ДВИЖЕНИЙ ЧЕЛОВЕКА | 2018 |
|
RU2736876C2 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2006 |
|
RU2310221C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2488889C1 |
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОГРЕБЕННЫХ ПОД ОБШИРНЫМИ ЗАВАЛАМИ ЛЮДЕЙ | 2007 |
|
RU2379703C2 |
Использование: изобретение относится к радиотехнике и может использоваться для определения положения подвижных объектов. Сущность изобретения: способ определения местоположения объекта заключается в том, что устанавливают излучатель волнового сигнала и датчик в заранее установленных точках, устанавливают центр обработки информации на объекте, периодически всенаправленно излучают кодированный сигнал излучателем, на первом датчике принимают сигнал излучателя, излучают свой маркерный сигнал, принимают его на втором датчике, в центре обработки информации принимают сигнал излучателя и последовательно сигналы датчиков, их индентифицируют, измеряют разность времен прихода между сигналами датчиков и между сигналами датчиков и излучателя, по разности времен вычисляют местоположение объекта. 4 ил.
СПОСОБ РАСПОЗНАВАНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА, заключающийся в том, что устанавливают излучатель кодированного волнового сигнала и не менее двух датчиков в заранее известных точках, устанавливают на объекте центр обработки информации, состоящей из приемника кодированного волнового сигнала и вычислителя, периодически всенаправленно излучают кодированный волновой сигнал излучателя, принимают датчиками сигнал, инициирующий излучение их маркерных сигналов, принимают кодированный волновой сигнал излучателя и маркерных сигналов датчиков в центре обработки информации, определяют центром обработки информации разности времен прихода кодированного волнового сигнала излучателя и маркерных сигналов датчиков, вычисляют по этим разностям местоположения объекта, отличающийся тем, что заранее задают последовательность срабатывания датчиков, после приема кодированного волнового сигнала первым датчиком формируют его маркерный сигнал и передают его на следующий в заданной последовательности датчик и в центр обработки информации, после приема каждым датчиком маркерного сигнала предыдущего датчика формируют свой маркерный сигнал и передают его на следующий датчик и в центр обработки информации, в центре обработки информации последовательно принимают кодированный волновой сигнал излучателя и маркерные сигналы всех датчиков после, после чего идентифицируют все принятые сигналы в центре обработки информации, определяют разность времен прихода кодированного волнового сигнала излучателя и маркерного сигнала каждого датчика, а также между маркерных сигналов пар датчиков и по этим разностям вычисляют местоположение объекта.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ БАТАРЕЯ | 2002 |
|
RU2230397C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
