Изобретение относится к области инженерно-психологического конструирования объектов управления, профессионального отбора, оценки уровня подготовки, диагностики функциональных возможностей оператора в системе человек-машина.
Известен способ диагностики возможностей оператора, реализованный в имитаторе преследующего слежения с адаптирующейся псевдослучайной программой траектории метки, в котором скорость движения метки изменяется по экспоненциальному закону от заданного максимума, и направление движения после каждого накрытия метки визиром, управляемым оператором.
Недостатком реализуемого в устройстве способа диагностики является отсутствие обратной связи по выходным параметрам качества слежения за меткой.
Наиболее близким к предлагаемому техническому решению является способ определения видеомоторной координационной способности, заключающийся в том, что по экрану индикатора перемещается метка, управляемая по программе заданной ЭВМ, и визир, управляемый оператором, задачей которого является совмещение и удержание метки в касании с визиром. При этом по соотношению времени "накрытия" метки с общим временем испытания определяется пригодность оператора к выполнению поставленной задачи. К числу недостатков прототипа следует отнести невозможность определения предельных возможностей оператора в течение продолжительного времени и его тренированности в режиме работы близком к предельному.
Целью изобретения является определение динамики предельных возможностей оператора при заранее заданной допустимой ошибке регулирования.
Поставленная цель достигается тем, что в способе оценки уровня подготовки оператора в системе человек-машина, основанном на измерении ошибки совмещения поданных на индикатор мишени, управляемой сигналом от программатора, и подвижного визира, управляемого сигналом от оператора, управляющие сигналы от программатора и от оператора корректируются дополнительными сигналами, величина которых зависит от разности величины ошибки оператора и допустимого порогового значения ошибки, а знак дополнительного сигнала противоположен знаку разности.
Сравнение предложенного технического решения с прототипом показывает, что предложенный способ отличается тем, что дополнительный сигнал, представляющий собой разность ошибок оператора и допустимого порогового значения этих ошибок с соответствующим знаком непрерывно используется для корректировки управляющих сигналов программатора и оператора. Скорость корректировки управляющих сигналов программатора и оператора задается априорно. Она служит для моделирования различных режимов работы системы в зависимости от динамики исследуемых процессов адаптации человека. Таким образом, предложенный способ соответствует критерию "новизна".
Сравнение предложенного технического решения с другими известными техническими решениями в данной области техники не позволило выявить в них признаки, отличающие предложенное решение от прототипа, что позволяет сделать вывод о соответствии критерию "существенные отличия".
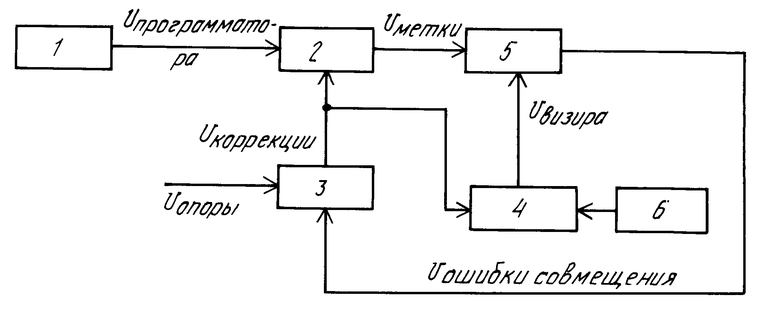
Изобретение поясняется чертежом, где приведена функциональная схема, реализующая предложенный способ.
От программатора 1 сигнал U программатора поступает на первый вход сумматора 2, на второй вход которого подается сигнал U коррекции с первого выхода блока сравнения 3, второй выход которого подключен к первому входу сумматора 4, а на первый и второй входы подаются соответственно сигналы U опоры и U ошибки совмещения, снимаемые с выхода индикатора 5, на управляющие входы метки и визира которого поступают сигналы с выхода сумматора 2 и 4 соответственно, ко второму входу сумматора 4 подключен выход управляющей ручки 6 оператора.
На примере предложенной схемы способ реализуется следующим образом.
Сигнал от программатора 1 через сумматор 2 поступает на вход управления меткой индикатора 5, заставляя последнюю смещаться по экрану со скоростью и в направлении, заданном программой.
Оператор, смещая ручку управления 6 через сумматор 4 воздействует на вход управления визиром индикатора 5 и стремится совместить визир с меткой; на выходе индикатора формируется сигнал U ошибки совмещения, соответствующий величине рассогласования положения метки и визира, и поступающий на второй вход блока сравнения, на первый вход которого подают сигнал U опоры допустимого значения ошибки.
Блок сравнения выделяет корректирующий сигнал U коррекции, подаваемый на второй вход сумматора 2. В зависимости от того, как оператор справляется с поставленной задачей (величина ошибки "накрытия" метки визиром с выхода индикатора 5) сигнал U коррекции увеличивает или уменьшает скорость смещения метки, создавая условия для работы данного оператора в режиме близком к предельному в течение длительного времени. Для дополнительного усложнения работы оператора возможна подача корректирующего сигнала на второй вход сумматора 4, при этом U коррекции смешивается с управляющим сигналом от ручки оператора, создавая дополнительные трудности в процессе слежения за меткой.
Использование способа, благодаря безинерционности обратной связи по адаптации параметров, позволяет: изучить динамику работы оператора, определить поведение системы человек-машина в области критических параметров ошибки регулирования, вызывающих отказ или срыв операторской деятельности, определить степень соответствия органов управления и органов отображения информации психофизиологическим требованиям человека, сократить время проведения экспериментальных исследований системы человек-машина по сравнению с существующими методами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работоспособности оператора | 1977 |
|
SU711362A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ | 1991 |
|
RU2011193C1 |
| Имитатор бимодального слежения | 1983 |
|
SU1123641A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕРМОСТОЙКОСТИ КОНСТРУКЦИОННЫХ КЕРАМИЧЕСКИХ МАТЕРИАЛОВ | 1997 |
|
RU2131403C1 |
| СЕКТОРНЫЙ ИНДИКАТОР МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1979 |
|
SU1840910A1 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО С ОБНАРУЖЕНИЕМ ОШИБОК И КОРРЕКЦИЕЙ ОДИНОЧНОЙ ОШИБКИ | 1993 |
|
RU2062512C1 |
| Частотомер | 1990 |
|
SU1721532A1 |
| СПОСОБ ПРОИЗВОДСТВА РЕДКОЗЕМЕЛЬНЫХ ПОСТОЯННЫХ МАГНИТОВ | 1993 |
|
RU2082551C1 |
| Адаптивная система управления электромеханическим устройством торможения колеса | 2016 |
|
RU2643305C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОТЛИВОК | 1992 |
|
RU2032488C1 |
Использование: изобретение относится к инженерно - психологическому конструированию объектов управления, профессионального отбора, оценки уровня подготовки, диагностики функциональных возможностей оператора в системе человек - машина. Сущность: в способе оценки уровня подготовки оператора в системе человек - машина, основанном на измерении ошибок совмещения поданных на индикатор мишени, управляемой сигналом от программатора, и подвижного визира, управляемого сигналом от оператора, управляющие сигналы от программатора и от оператора корректируются дополнительными сигналами, величина которых зависит от разности величины ошибки оператора и допустимого порогового значения ошибки, а знак дополнительного сигнала противоположен знаку этой разности. Новым является дополнительный сигнал, представляющий собой разность ошибок оператора и допустимого порогового значения этих ошибок с соответствующим знаком, непрерывно использующийся для корректировки управляющих сигналов программатора и оператора. 1 ил.
СПОСОБ ОЦЕНКИ УРОВНЯ ПОДГОТОВКИ ОПЕРАТОРА, основанный на измерении сигнала ошибок совмещения между мишенью, управляемой сигналом от программатора, и подвижным визиром, управляемым сигналом от оператора, отличающийся тем, что, с целью определения динамики предельных возможностей оператора, управляющие сигналы от программатора и оператора корректируются дополнительным сигналом, величина которого зависит от разности величины сигнала ошибки совмещения и допустимого значения ошибки, а знак дополнительного сигнала противоположен знаку этой разности.
| УСТРОЙСТВО для НАСТРОЙКИ ОДНОРОДНЫХ СТРУКТУР | 0 |
|
SU251919A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |

