со
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1339499A2 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1984 |
|
SU1191888A1 |
| Устройство для выделения ортогональных составляющих электрических величин | 1989 |
|
SU1744733A1 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1985 |
|
SU1295371A1 |
| Анализатор частотных характеристик | 1977 |
|
SU702352A1 |
| Устройство для определения частотных характеристик систем автоматического управления | 1980 |
|
SU892419A2 |
| Анализатор частотных характеристик линейных систем управления | 1976 |
|
SU640264A1 |
| Адаптивный вычислитель частотных характеристик систем автоматического управления | 1980 |
|
SU1072004A1 |
| Способ измерения частоты синусоидальных сигналов | 1990 |
|
SU1798717A1 |
| Устройство для решения линейных интегральных уравнений (его варианты) | 1985 |
|
SU1278899A2 |
Изобретение относится к электроизмерительной технике. Цель изобретения - повышение точности измерения инфранизкой частоты. Для этого в частотомер введены вычитающий блок 1, фазосдвигающий блок 2, множительные блоки 3, 7, корректирующий фильтр 6, и масштабирующие блоки 9-11. Частотомер содержит также сумматор 4, интеграторы 5,8, индикатор 12. С течением времени в данной системе происходит подстройка оценки частоты до величины измеряемой частоты с высокой степенью точности, свойственной компенсационным методам. 1 ил.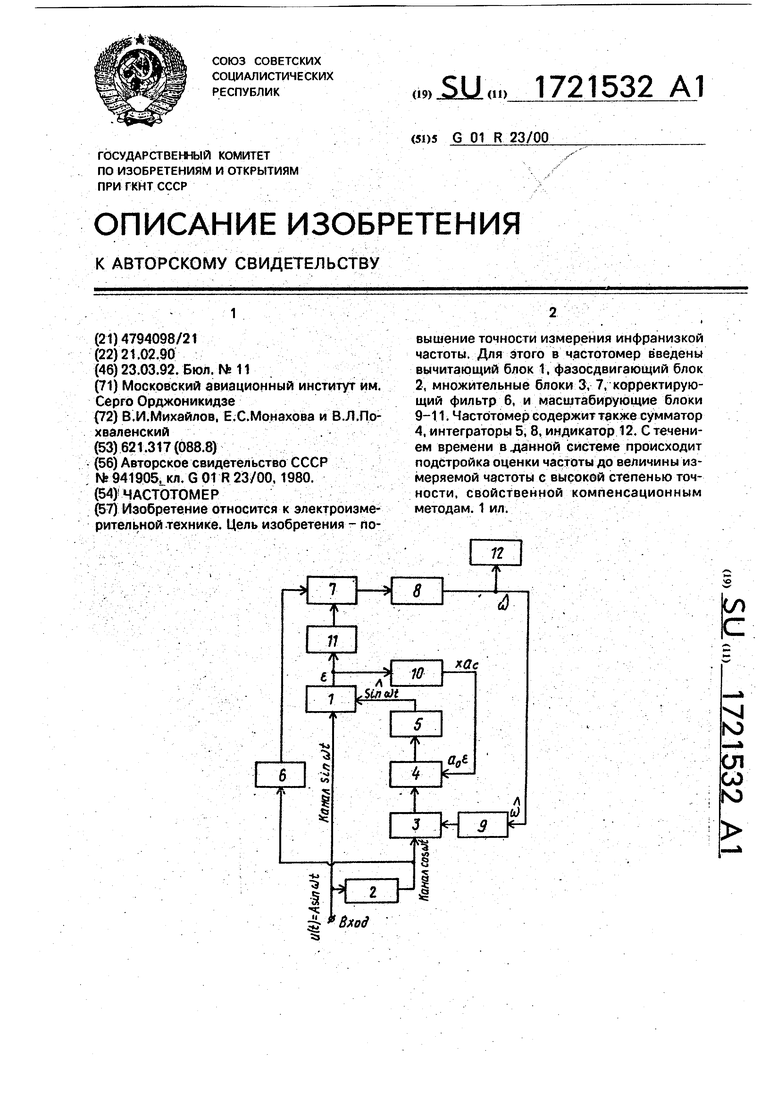
VJ
ю
ел
ох
ND
Изобретение относится к техническим средствам измерения частоты гармонических колебаний электрических сигналов в инфрзнизком диапазоне частот.
Целью изобретения является повышение точности измерения инфранизкой частоты.
На чертеже представлена структурная схема предлагаемого частотомера.
Частотомер содержит вычитающий блок 1, фазосдвигающий блок 2 на 90°,множительный блок 3, сумматор 4, интегратор 5, корректирующий фильтр 6, второй множительный блок 7, интегратор 8, масштабирующие блоки 9-11 и индикатор 12. При этом выход фазосдвигающего блока 2 подключен к входу корректирующего фильтра 6 и к первому входу множительного блока 3, выход которого соединен с первым входом сумматора 4. Выход вычитающего блока 1 через масштабирующий блок 10 подключен к второму входу сумматора и через масштабирующий блок 11 - к второму входу множи- тельного блока 7, выход которого через интегратор 8 соединен с индикатором 12 и с входом масштабирующего блока 9, выход которого подключен к второму входу множительного блока 3. .
Масштабирующие блоки 9 и 11 введены в схему для обеспечения работы множительных блоков 3 и 7 в необходимом диапазоне напряжений.
В предлагаемом частотомере использу- ется компенсационный метод измерения частоты, а именно метод идентификации с настраиваемой моделью.Частотомер работает следующим образом.
Настраиваемая модель, представляющая собой совокупность блоков 3-5 формирует сигнал оценки sin входного сигнала sin ci)i (здесь и далее для упрощения математических выкладок амплитуда входного сигнала А 1) в соответствии с уравнением
d лл
-- sin oj t a) QOS и) t+ а0 е, d t
О)
dt
повремени синусного сигнала
d dt
. / sinuJt;
где cos o)i- сигнал е выхода фазосдвигаю- щегодблока на 00°;
о)- оценка измеряемой частоты ;
н .д„
sir.и)t-сигнал оценки производной
ао постоянный коэффициент;
е - сигнал ошибки (невязка), представляющий собой разность между реальным сигналом sin fflt и сигналом оценки sin cwt,
0
5
0
5
0
получаемым интегрированием его скорости
d Л
--s nun. dt
Входной сигнал sin О) t, пройдя через фазосдвигающий блок 2 на 90°, преобразуется в сигнал cos со t, который умножается на сигнал оценки (и в множительном блоке 3. В результате этого перемножения на выходе блока 3 получаем сигнал ы cos ш t, являющийся первым слагаемым в правой части уравнения (1). К полученному сигналу в сумматоре 4 прибавляется сигнал ао Ј, чем завершается формирование правой части уравнения (1). На выходе интегратора 5 имеем сигнал оценки sin со t входного сигнала sin (i)i. Таким образом, указанная последовательность блоков 3-5 реализует решение дифференциального уравнения (1).
В вычитающем блоке 1 осуществляется сравнение реального сигнала sin (oi с полученной оценкой этого сигнала sOr , при этом на выходе блока формируется сигнал невязки Ј
Ј Sin 0)1
5
0
5
А
sin о) v,
de
d t
((а-со) cos со t - до Ј.(2)
Уравнение (2) позволяет выявить связь между ошибкой настройки частоты (о)- а)) и невязкой Ј. С выхода блок 1 сигнал невязки поступает через масштабирующий блок 10, осуществляющий умножение Ј на постоянный коэффициент а0, на сумматор4, образуя обратную связь по невязке. Кроме того, сигнал cos cot пропускается через корректирующий фильтр 6, представляющий собой апериодическое звено с передаточной фуна0 скциеи вида . для внесения необходиР т 3
мого сдвига фаз р в сигнал coswt из следующих соображений. При точной настройке со (о установившееся значение невязки Ј (t) 0. При (со - со) const Ф О установившееся значение невязки будет определяться решением дифференциального уравнения (2) при
F . Ш . -1 гпф) Т - у),
4о +
В2о
50
где у
arctg-5-.
do
5
В этом случае сигнал невязки несет информацию об ошибке (ft)-а)} и потому может быть использован в алгоритме подстройки со. Для этого достаточно организовать такой сигнал, в котором исключалась бы зависимость знака сигнала Е от знака косинусной составляющей cos( - р). Это можно обеспечить умножением е на величину, пропорциональную cos(u) t - р), которую можно
получить, скорректировав сигнал cos cot no фазе с помощью корректирующего фильтра
Я
с передаточной функцией вида ---.
р + а0
На множительном блоке 7 производится перемножение сигнала невязки ей сигнала cos(tut -(ft, что обеспечивает подстройку оценки частоты ш в соответствии с уравнением
-ecos(un-0, (3)
где/г - постоянный коэффициент.
На выходе интегратора 8 получаем сигнал оценки частоты ш, который по обратной связи через масштабирующий блок 9 поступает на множительный блок 3 и на индикатор 12 частоты.
С течением времени в описанной системе происходит подстройка оценки частоты
Л.
ш к величине измеряемой частоты а) с высокой степенью точности, свойственной ком- пенсационым методам. Требуемое качество процесса подстройки частоты ш с учетом помех обеспечивается подбором величины коэффициентов а0 и ju, влияющих на дина- мику подстройки.
Выполнена экспериментальная проверка работоспособности заявляемого частотомера путем аналогового моделирования.
Частотомер позволяет существенно увеличить точность измерения частоты по сравнению с прототипом, поскольку использует компенсационный метод, относя
0
5
0
5
0
щийся к точным методам измерения, а также благодаря замене операции деления на операцию умножения.
Кроме этого, наличие интегратора 8 в цепи обратной связи позволяет увеличить помехозащищенность частотомера в инфранизком диапазоне частот.
Формула изобретения Частотомер, содержащий последовательно соединенные сумматор и первый интегратор, второй интегратор, индикатор, о т- личающийся тем, что, с целью повышения точности измерения инфранизкой частоты, в него введены последовательно соединенные фззосдвигающий блок, корректирующий фильтр и первый множительный блок, вычитающий блок, три масштабирующих блока, второй множительный блок, вход которого соединен с выходом фазосдвигающего блока, а вход - с первым входом сумматора, выход интегратора соединен с первым входом вычитающего блока, второй вход которого соединен с входами фазосдвигающего блока и частотомера, выход вычитающего блока через, первый и второй масштабирующие блоки соединен соответственно с вторыми входами сумматора и первого множительного блока, выход которого через второй интегратор соединен с входами индикатора и третьего масштабирующего блока, выход которого соединен с вторым входом второго множительного блока.
| Устройство для измерения частоты низкочастотных гармонических сигналов | 1980 |
|
SU941905A1 |
