Изобретения относятся к способам контроля за положением пути, к используемым при этом устройствам и к устройствам для ремонта пути, в частности, к устройствам для его стабилизации, которые могут при этом и определять сопротивление поперечному смещению рельсового пути.
Известен способ непрерывного измерения сопротивления поперечному смещению рельсового пути, заключающийся в том, что воздействуют на рельсовый путь равномерными вибрационными колебаниями, направленными поперек пути, при помощи возбудителя вибрации и определяют значение сопротивления поперечному смещению пути.
Техническим результатом изобретения является повышение его эффективности, т. к. оно дает возможность определить достоверные значения сопротивления, поперечному смещению пути без изменения положения рельсового пути.
Для достижения этого технического результат в способе непрерывного измерения сопротивления поперечному смещению рельсового пути, заключающемся в том, что воздействуют на рельсовый путь равномерными вибрационными колебаниями, направленными поперек пути, при помощи возбудителя вибрации и определяют значения сопротивления поперечному смещению пути путем измерения рабочего давления источника энергии, питающего возбудитель вибрации.
Кроме этого, значения сопротивления поперечному смещению рельсового пути определяют в соответствии с соотношением:
где
QVW сопротивление поперечному смещению пути;
Ku и Ko коэффициенты;
Fv статическая нагрузка на возбудитель вибрации;
Pр рабочее давление источника энергии, питающего возбудитель вибрации;
f частота вибрации,
причем значения сопротивления поперечному смещению пути определяют при постоянной статической нагрузке на возбудитель вибрации и его постоянных амплитуде и частоте вибрации.
Известное устройство для непрерывного определения сопротивления поперечному смещению рельсового пути и/или стабилизации рельсового пути, содержащее перемещаемую по пути раму, соединенный с рамой путем вертикального перемещения вибрационный агрегат, включающий в себя возбудитель вибрации с гидроприводом, включенным в гидросистему, и инструменты для взаимодействия с рельсами, измерительную систему, регистрирующий блок и вычислительный блок, связанный с измерительной системой и регистрирующим блоком.
Для достижения упомянутого технического результата устройство для непрерывного определения сопротивления поперечному смещению рельсового пути и/или стабилизации рельсового пути, содержащее перемещаемую по пути раму, соединенный с рамой путем приводов вертикального перемещения вибрационный агрегат, включая в себя возбудитель вибрации с гидроприводом, включенным в гидросистему, и инструменты для взаимодействия с рельсами, измерительную систему, регистрирующий блок и вычислительный блок, связанный с измерительной системой и регистрирующим блоком, снабжено включенным в упомянутую гидросистему датчиком давления, подключенным к упомянутому вычислительному блоку для определения сопротивления поперечному смещению рельсового пути.
Кроме этого, устройство снабжено дополнительными датчиками давления, соединенными с упомянутыми приводами вертикального перемещения для определения вертикальной нагрузки этих приводов, и соединенных с вибрационным агрегатом измерителем ускорений для определения амплитуды колебаний.
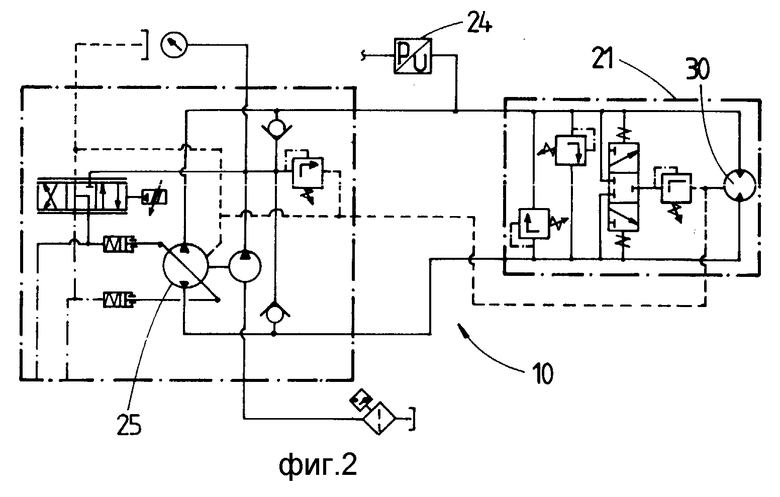
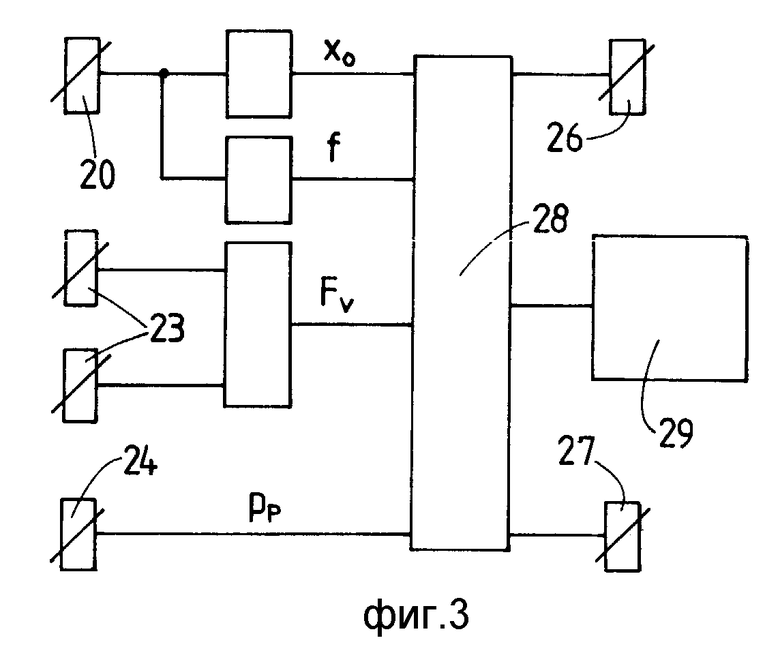
На фиг. 1 изображена путевая машина с устройством для непрерывного определения сопротивления поперечному смещению рельсового пути и/или стабилизации рельсового пути, общий вид; на фиг. 2 схема включения гидравлической системы, предназначенной для включения возбудителя вибрации; на фиг. 3 упрощенная схема включения измерительных устройств, предназначенных для определения сопротивления поперечному смещению пути.
Изображенная на фиг. 1 как стабилизатор рельсового пути машина 1 имеет продольную раму 2, которая с помощью ходовых тележек 3 опирается на рельсы 4 рельсового пути 5. Для непрерывного рабочего движения машины 1, выполненной как обычное транспортное средство, предназначается для каждой ходовой тележки 3 ходовой привод 6, в то время как предусматривается другой гидродинамический ходовой привод 7 для выполнения движения перестановки. Включение всех приводов машины 1 происходит через центральный блок питания 8 и гидравлический агрегат 9 гидравлической системы 10. Расположенные на концах ходовые кабины имеют пульпы управления 11, а также для вибрационных или же стабилизирующих агрегатов 12, соединенных с рамой 2 в центре между ходовыми тележками 3, и предназначенных между ходовыми тележками 3 и предназначенных для рабочего использования во время рабочего движения машины 1 и расположенных друг за другом вдоль рельсового пути. Они имеют инструменты, состоящие из роликов 13 с ребордами и поворотных роликовых тарелок 14. Ролики 13 прижимаются с внутренней стороны к рельсам 4 с помощью не показанных распорных приводов в поперечном направлении рельсов и начинают вибрировать в горизонтальной плоскости, проходящей в поперечном направлении относительно продольной оси машины, с помощью собственного возбудителя вибраций 21, соединенного с вибрационным агрегатом 12. Расположенные вертикально приводы 15 для вертикального перемещения агрегата 12, выполненные как гидравлические цилиндры и соединенные с рамой 2, служат также для передачи статической нагрузки на рельс 5. Получаемое в результате этого опускание рельса в связи с вибрацией рельса регулируются с помощью базовой измерительной системы 16, которая в качестве измерительной базы имеет натянутый между ходовыми тележками 3 трос 17 над каждым рельсом 4. Перемещающийся по высоте и выполненный в виде ролика с ребордой щуп 18 направляется по рельсу 5 между двумя вибрационными агрегатами 12 и имеет датчик 19 для измерения высоты, взаимодействующий с соответствующим тросом 17 над каждым рельсом 4.
Для каждого вибрационного агрегата 12 предназначается измерительное устройство 20, выполненное, например, как измеритель ускорений, чтобы тем самым определять амплитуды вибраций 21. Другое измерительное устройство 22 предназначено для определения частоты вибраций возбудителя вибраций 21. Для каждого привода 15 предназначается датчик давления 23 для определения статической нагрузки, воздействующей на рельсовый путь 5. Другой датчик давления 24 предусмотрен между гидравлическим насосом 25 (фиг. 2) и возбудителем вибраций 21 для определения рабочего давления, предназначенного для включения возбудителя вибраций 21. Другие измерительные устройства 26, 27 служат для определения скорости движения вперед или же рабочей скорости машины 1 или же для определения пройденного пути. Все измерительные устройства и датчики давления соединяются с вычислительным блоком 28 и регистрирующим блоком 29.
На гидравлической схеме включения согласно фиг. 2 изображен уже упомянутый датчик давления 24, который предусматривает для определения рабочего давления между гидравлическим насосом 25 и возбудителем вибраций 21, включаемым гидромотором 30.
На фиг. 3 изображена схематически конструкция измерительного устройства для определения сопротивления поперечному смещению. С помощью измерительного устройства 20 определяется ускорение в поперечном направлении а (m/s2). Путем двойного интегрирования вводится затем амплитуда вибрации X0 в вычислительный блок 28. Буквой f обозначается частота вибрации, которая аналогично вводится в вычислительный блок 28. Статическая нагрузка Fv определяется отдельно как для левого, так и для правого привода 15. С помощью датчика давления 24 подается в вычислительный блок 28 необходимое для включения возбудителя вибраций 21 рабочее давление Pp. С помощью измерительного устройства 27 регистрируется путь, пройденный машиной 1 по отношению к установленной точке, так что определенное сопротивление поперечному смещению относится точно к соответствующему участку рельсового пути. С помощью скорости машины 1, определенной измерительным устройством 26, можно регистрировать или же учитывать влияние на сопротивление поперечному смещению, зависимое от скорости движения.
Для приводимых ниже теоретических выкладок, используемых для определения сопротивления поперечному смещению QVW, применяются следующие символы: μ -сила трения между балластным щебнем и шпалой; dt дифференциальная времени; dw дифференциальная энергии; f частота вибрации; Fv статическая нагрузка или же вертикальное усилие; K0 коэффициент; Kv - коэффициент;  коэффициент;
коэффициент;  коэффициент; np число оборотов вибрационного агрегата 12; Pab отводимая энергия; PDGS энергия вибрации вибрационного агента 12; Pg энергия вибрации путевой клетки и балластного щебня; Pp рабочее давление для включения возбудителя вибраций 21; Pr энергия трения; Prot доля энергии вращения; Pzu подаваемая энергия; Qp подаваемая энергия гидравлического насоса 25; QVW сопротивление поперечному смещению; QVW100 нормированное сопротивление поперечному смещению (нагрузка 100 КН); t время; Vp объем заполнения гидравлического насоса 25; X0 амплитуда вибрации вибрационного агрегата 12; kH килоньютон.
коэффициент; np число оборотов вибрационного агрегата 12; Pab отводимая энергия; PDGS энергия вибрации вибрационного агента 12; Pg энергия вибрации путевой клетки и балластного щебня; Pp рабочее давление для включения возбудителя вибраций 21; Pr энергия трения; Prot доля энергии вращения; Pzu подаваемая энергия; Qp подаваемая энергия гидравлического насоса 25; QVW сопротивление поперечному смещению; QVW100 нормированное сопротивление поперечному смещению (нагрузка 100 КН); t время; Vp объем заполнения гидравлического насоса 25; X0 амплитуда вибрации вибрационного агрегата 12; kH килоньютон.
Для пояснения теоретических выкладок, используемых для определения сопротивления поперечному смещению, приводятся следующие уравнения:
Передаваемая на рельсовый путь 5 энергия трения (Pr);
Подаваемая энергия (Pzu):
Pzu Qp•Pp Vp•np•Pp Vp•f•Pp
Постепенно отводимая энергия (Pab):
Pab PDGS + Pg + Prot
Отношение QVW вытекает из следующего уравнения энергии:
Pzu Vp•f•Pp Pr + Pab QVW•X0•4f + Pab
Чтобы тем самым не учитывалось на сопротивление поперечному смещению пути колебания вертикальной нагрузки или же статической нагрузки (во время рабочего применения стабилизатора рельсового пути для опускания рельсового пути 5 в заданное положение), должна эта величина нормироваться, например до 100 kH вертикальной нагрузки (QVW100). Регулировочный узел гидравлического насоса не изменяется для сохранения постоянным рабочего объема. (В качестве альтернативы возможно также изменение рабочего объема; в этом случае должно быть во всяком случае определено изменение и учтена замеренная энергия).
При постоянных значениях амплитуды вибрации X0, частоты вибрации f и статической нагрузки Fv получается следующее отношение:
Как вытекает из уравнений, может быть измерено даже абсолютное значение QVW. Кроме того, может в каждом случае измеряться качественное значение QVW во время процесса стабилизации (опускание рельсового пути в заданное положение).
При практическом применении может определение сопротивления поперечному смещению осуществляться по выбору или вместе с контролируемым опусканием рельсового пути 5 в желаемое заданное положение (стабилизация рельсового пути) или также в процессе собственного движения. В последнем случае уже стабилизированный рельсовый путь не должен более опускаться; следствие этого приводы нагружаются только минимальной нагрузкой, то есть только настолько, чтобы обеспечить оптимальное надежное соединение возбудителя вибраций 21 с рельсовым путем 5, не создавая, однако, при этом усилие для опускания. Рельсовый путь подвергается затем воздействию горизонтальных вибраций, создаваемых возбудителем вибраций 21, который соединен с ним и непрерывно перемещается в продольном направлении рельсового пути. Значение амплитуды вибрации и ее частота охраняется при этом постоянными, в то время как значение статистической нагрузки в этом случае настолько мало, что не оказывает влияния на результаты измерения. Нагрузка на возбудитель вибрации 21 осуществляется с помощью гидравлической системы 10, при этом для получения указанной постоянной амплитуды колебания и частоты колебания необходимо определенное рабочее давление Pp, зависимое от особенностей рельсового пути, которое регистрируется датчиком давления 24, подключенным к гидравлической системе 10, и передается на вычислительный блок 28. Согласно приведенным выше формулам определяется с их помощью значение сопротивления поперечному смещению рельсового пути, которое точно соответствует участку рельсового пути, по которому переместилось измерительное устройство 27, и который был зарегистрирован этим устройством.
Определение сопротивления поперечному смещению пути выполняется во время стабилизации рельсового пути в принципе аналогично, только при этом учитывается также замеренная величина статической нагрузки при проведении расчетов, при этом эта величина для обоих приводов 15 определяется отдельно, так как эти приводы, например, на участках подъема рельсового пути подвергаются нагрузкам различной величины.
Разумеется, вместо описанной гидравлической системы могут также применяться другие энергетические системы, например, электрическая энергия, для нагрузки возбудителя вибраций 21. В этом случае может использоваться значение изменения электрического тока в качестве корректирующей величины при измерении сопротивления поперечному смещению.
Использование: для контроля за состоянием пути для его ремонта. Сущность изобретения: устройство содержит раму, перемещаемую по рельсовому пути, вибрационный агрегат, соединенный с рамой путем приводов вертикального перемещения и включающий в себя возбудитель вибрации с гидроприводом, включенным в гидросистему, в которую включен датчик давления. Устройство также содержит инструменты для взаимодействия с рельсами, измерительную систему, регистрирующий блок и вычислительный блок, к которому подключен датчик давления для определения сопротивления поперечному смещению рельсового пути. Значения сопротивления поперечному смещению пути определяют путем измерения рабочего давления источника энергии, питающего возбудитель вибрации. 2 с. и 4 з.п.ф-лы, 3 ил.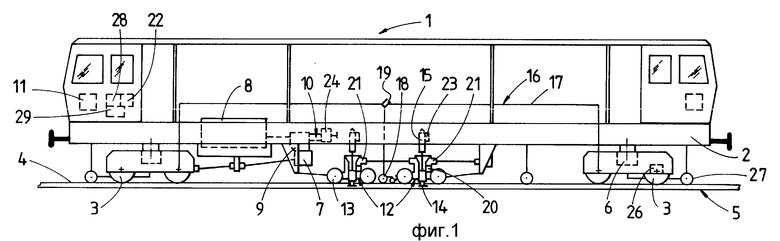
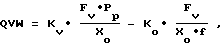
где QVW сопротивление поперечному смещению пути;
Kv и Ko коэффициенты;
Fv статическая нагрузка на возбудитель вибрации;
Xo амплитуда вибрации возбудителя вибрации;
Pp рабочее давление источника энергии, питающего возбудитель вибрации;
f частота вибрации.
| SU, патент, 1838494, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

