Изобретение относится к балансировочной технике и может применяться для воздушно-винтовых агрегатов силовой установки на самолетах в режиме аэродромной стоянки самолета.
Известен способ уравновешивания динамического момента неуравновешенного винта [1] путем задания первоначального угла ϕiустановки лопастей, центры тяжести которых не лежат в одной плоскости вращения, перпендикулярной оси винта, затем при испытаниях осуществляют перестановку лопастей винта на угол ϕ2 и находят ϕ ϕ2 ϕ1, а затем определяют величину А, на которую отойдет от оси вращения винта центр тяжести лопасти при перестановкe на угол ϕ. Уравновешивающий динамический момент определяют по формуле
Mmm где m масса одной лопасти;
где m масса одной лопасти;
R расстояние центра тяжести каждой из лопастей от оси винта;
Ω угловая скорость вращения винта.
Для реализации этого способа используются балансировочные станки с роликовыми или ножевыми опорами. Винт, насаженный на вал, заставляют свободно кататься по двум горизонтальным направлениям.
При качении винта определяют величину уравновешивающего динамического момента Mm неуравновешенного винта.
Недостатком указанного способа является то, что уравновешивающий динамический момент определяется этим способом только на балансировочном станке. Этим способом не удается устранить, в частности, остаточный дисбаланс, возникающий вследствие неточного уравновешивания по грузу и направлению. Можно установить, что остаточный дисбаланс ▿ находится к естественному дисбалансу Pw2 в отношении: =
=  +4
+4 1±
1±  sin
sin ; где ΔР погрешность установки уравновешенного груза;
; где ΔР погрешность установки уравновешенного груза;
α погрешность размещения по углу в противоположном направлении естественному дисбалансу.
Так, если удалось добиться в данном случае уравновешенности с остатком ΔР0,001 кгм, то в летных условиях при  (2πfв)2=4·10·625=25000
(2πfв)2=4·10·625=25000 дисбаланс составляет Р ΔР ω2 25 н2,5 кгс и является неприемлемой величиной.
дисбаланс составляет Р ΔР ω2 25 н2,5 кгс и является неприемлемой величиной.
Наиболее близким к изобретению по технической сущности является способ динамической балансировки воздушных винтов [2] заключающийся в том, что величину неуравновешенности вращающего агрегата находят по размаху колебаний на корпусе этого агрегата путем установки пробного груза, создающего центробежную силу, изменяющего размах и фазу колебаний корпуса по отношению к колебаниям при первоначальном запуске без пробного груза. По этому способу для уравновешивaния требуется два пуска: пуск с начальной неуравновешенностью и пуск с пробным грузом.
Во время пусков измеряют в реперных точках на корпусе двигателя амплитуды вибрации на частоте основной винтовой гармоники и относительное изменение фазы вибрации. В итоге балансировки агрегата после установки уравновешивающего груза определяют ожидаемый размах колебаний по формуле:
C= где А, В размах колебаний без и с пробным грузом;
где А, В размах колебаний без и с пробным грузом;
α угол сдвига фаз между этими колебаниями.
Величины А,В и α регистрируются с помощью стробоскопа со световым ориентиром. Величину уравновешенного груза Py находят относительно пробного груза Рр по формуле: Рy Pp . Угол β для размещения уравновешивающего груза определяют по формуле:
. Угол β для размещения уравновешивающего груза определяют по формуле:
sinβ  sinα
sinα
Недостатком способа является то, что этот способ выполним при соблюдении жестких требований на линейность внешней вибрации двигателя от величины установленной массы груза, не допускается флюктуация частоты колебаний агрегата.
В реальных условиях на самолете обороты винта заметно изменяются, а применение способа не сопровождают точными показателями в определении выходных параметров динамической балансировки. Способ не учитывает влияние амплитудно-фазовой характеристики упругой подвески (включающей раму с упругими подкосами для крепления двигателя, шасси) на амплитудные уровни и фазу колебаний корпуса двигателя при балансировке агрегата, а это снижает точность определения местоположения и величины уравновешивающего груза на агрегате при балансировкe.
Кроме того, по требованиям безопасности применение стробоскопа со световым ориентиром недопустимо.
Предлагаемый способ позволяет повысить точность за счет учета погрешности влияния параметров амплитудно-фазовой характеристики упругой подвески на динамическую балансировку агрегата. Сущность изобретения заключается в том, что динамическую балансировку воздушно-винтового агрегата силовой установки на самолете осуществляют путем запуска агрегата с установленным в плоскости вращения винта компенсирующим грузом, уравновешивающим динамический дисбаланс агрегата, повторного запуска с установленным на агрегате пробным грузом и регистрации на обоих запусках вибрации на основной винтовой частоте вращения.
Согласно изобретению третий запуск агрегата с пробным грузом, смещенным на произвольный угол относительно первоначального положения, на всех запусках измеряют резонансную частоту и виброускорения на рабочей частоте вращения, а величину уравновешивающего груза и место его установки определяют по формуле: 1+
1+ -2
-2 cosϕ
cosϕ
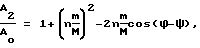
(1) =1+
=1+ n
n -2n
-2n cos(ϕ-Ψ)
cos(ϕ-Ψ)
При fp < fi в формулы (I) вводят корректирующую поправку на величины виброускорений согласно соотношению
 при fp < fi(2) где m масса пробного груза;
при fp < fi(2) где m масса пробного груза;
М масса уравновешивающего груза;
Ао.Аi амплитуды вибронагрузок, измеренные при начальном дисбалансе и при i-том запуске;
Ψ угол перестановки груза в плоскости коррекции винта относительно первоначального положения;
ϕ угол между оптимальным положением пробного груза, при котором была наименьшая вибрация, и искомым местом установки уравновешивающего груза;
n коэффициент изменения величины пробного груза, при маленьких амплитудах вибрации изменяют массу груза n раз;
fp резонансная частота колебаний;
fi частота основной винтовой гармоники; (fo)
(fo) (fi) виброускорения, измеренные при начальном дисбалансе, на i-ом пуске на частотах (fo), (fi) сканирующей основной винтовой гармоники.
(fi) виброускорения, измеренные при начальном дисбалансе, на i-ом пуске на частотах (fo), (fi) сканирующей основной винтовой гармоники.
Таким образом, повышение точности динамической балансировки воздушно-винтового агрегата на самолете достигается за счет введения поправки на амплитуды виброускорений, измеренных при начальном дисбалансе, на i-м пуске на частотах (fo), (fi) основной винтовой гармоники. Участок кривой АЧХ, измеренной на воздушно-винтовом агрегате, сохраняется практически постоянным при fp>fi, поэтому геометрическая форма АЧХ упругой подвески силовой установки мало сказывается на ухудшении точности регистрации виброускорений, а при fp<fi амплитуда виброускорения изменяется в зависимости от изменения частоты основной винтовой гармоники.
Заявленный способ выполняется в следующей последовательности.
На рабочей частоте вращения с помощью виброизмерительной аппаратуры записывают вибрацию. В произвольном по углу месте устанавливают пробный груз и повторяют указанные измерения. Затем переставляют груз на угол ϕ или увеличивают его массу, например, в два раза, повторяют измерения уровня вибрации.
При каждом пуске по амплитудно-частотной характеристике определяют резонансную частоту на корпусе двигателя подвески и частоту основной винтовой гармоники, сравнивают их.
При fp < fi вводят поправку  на виброускорения, что соответствует определению вибросмещений.
на виброускорения, что соответствует определению вибросмещений.
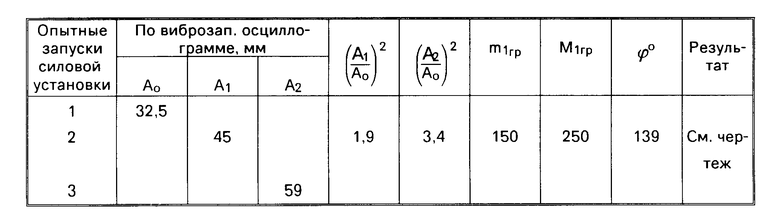
П р и м е р 1. При n 2,  > 1, Ψ= 0 определяют величину угла отсчета ϕ и величину уравновешивающего груза по формулам:
> 1, Ψ= 0 определяют величину угла отсчета ϕ и величину уравновешивающего груза по формулам:
cosϕ 
M=m
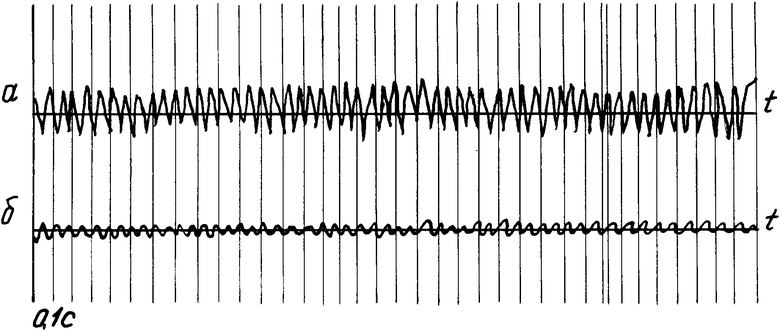
В таблице приведены расчетные данные, сопровождаемые реальными виброзаписями на самолете (см.чертеж), на которых приведены типовые осциллограммы (реальные) виброзаписей, полученные в полевых условиях в ходе динамической балансировки винтового агрегата поршневого самолета Ту-85, выполненной с помощью заявленного способа: а) вибрация до балансировки; б) после балансировки (по схеме и соотношениям для примера 1).
П р и м е р 2. Если n  ,
,  Ψ= 0, m, тогда
Ψ= 0, m, тогда
cosϕ  n
n -
- +
+ 1-n
1-n
M=m
П р и м е р 3. Если n 1,2,3, Ψ= 180о, m, тогда
cosϕ 
M=m
При  >1 n 2
>1 n 2
cosϕ=
M=
Изобретение относится к балансировочной технике и может применяться для воздушно-винтовых агрегатов силовой установки на самолетах в режиме аэродромной стоянки самолета. Предлагаемый способ позволяет повысить точность динамической балансировки. Сущность изобретения заключается в том, что в способе динамической балансировки воздушно-винтового агрегата, содержащего измерение вибрации на корпусе двигателя при пусках с начальной неуравновешенностью и пробным узлом, установленным на конструкции в плоскости вращения винта, дополнительно проводят пуск с пробным грузом, смещенным на заданный угол, при этом на всех запусках на корпусе двигателя измеряют резонансную частоту и виброускорения на основной частоте вращения и определяют величину уравновешивающего груза и место его установки по приведенным в описании формулам: 1 ил. 1 табл.
СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ВОЗДУШНО-ВИНТОВОГО АГРЕГАТА СИЛОВОЙ УСТАНОВКИ НА САМОЛЕТЕ, заключающийся в том, что производят запуск агрегата с установленным в плоскости вращения винта компенсирующим грузом, уравновешивающим динамический дисбаланс агрегата, осуществляют повторный запуск с установленным на агрегате пробным грузом и на обоих запусках регистрируют вибрацию на рабочей частоте вращения, отличающийся тем, что производят третий запуск агрегата с пробным грузом, смещенным на произвольный угол относительно первоначального положения, на всех запусках измеряют резонансную частоту и виброускорения на рабочей частоте вращения, а величину уравновешивающего груза и место его установки определяют по формулам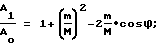
где m масса пробного груза;
M масса уравновешивающего груза;
Ψ угол перестановки груза в плоскость винта относительно первоначального положения;
v угол между оптимальным положением пробного груза, при котором была наименьшая вибрация и искомым местом установки уравновешивающего груза;
n коэффициент изменения величины пробного груза;
A0 Ai амплитуды вибрации, измеренные при начальном дисбалансе и при i-м запуске двигателя;
fр резонансная частота колебаний;
fi частота основной винтовой гармоники; виброускорения, измеренные при начальном дисбалансе на i-м пуске частоты основной винтовой гармоники.
виброускорения, измеренные при начальном дисбалансе на i-м пуске частоты основной винтовой гармоники.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Основы балансировочной техники./Под ред.Щепетильникова, т.1 | |||
| М.: Машиностроение, 1975. | |||
