Изобретение относится к области аэрокосмической техники, а именно, к способам определения аэродинамических характеристик - зависимостей коэффициентов аэродинамических моментов от определяющих переменных: углов атаки, скольжения и углов отклонения рулей, формы указанных зависимостей и их числовых параметров.
Изобретение может быть использовано при летных испытаниях новых компановок летательных аппаратов, освоении новых режимов полета и при создании информационной части самонастраивающихся автопилотов.
Увеличение достоверности описания математической модели движения летательного аппарата (ЛА) позволит повысить его эксплуатационную надежность.
Известны способы /1/, /2/ определения зависимостей аэродинамических моментов в практике летных испытаний самолетов, управляемых летчиком вручную (без автопилота). Эти способы заключаются в возбуждении переходных процессов в виде дач руля (ступенчатого движения руля с фиксацией и последующим возвратом его в исходное состояние).
Известен способ с оптимизацией формы движения руля самолета /3/ для получения более точных значений одновременно вычисляемых оценок параметров наперед выбранной формы зависимостей аэродинамических характеристик ЛА.
Недостаток указанного способа состоит в том, что форма зависимостей коэффициентов аэродинамических моментов принимается наперед известной, определяются только ее параметры, что ведет к снижению точности определения указанных зависимостей и усложняет процесс их вычисления.
Внедрение автоматизации в управление полетом, а также создание беспилотных ЛА сильно усложнило проблему определения аэродинамических характеристик вследствие того, что работа автопилота превносит существенную взаимную корреляцию в зависимости аргументов, определяющих аэродинамические характеристики. В частности, для продольного канала становятся сильно коррелированными углы атаки и отклонения руля высоты, для бокового канала - угол отклонения руля направления и элеронов. Реализация переходных процессов при зажатых рулях стала невозможной.
Общие идеи идентификации характеристик автоматических систем подробно рассмотрены в ряде монографий, в частности, в работе /4/. В ней рекомендовано для возбуждения вынужденного движения, необходимого при идентификации, использовать бинарный случайный процесс ("телеграфный" сигнал), а решение задачи принято считать состоящим из двух частей: первой - определение формы (характера) искомых зависимостей, второй - нахождение численных значений параметров.
В практике летных испытаний ЛА с автопилотом нашли применение возбуждения переходных процессов в виде импульсных, ступенчатых сигналов, а также одночастотных, одновходовых гармонических сигналов /5/.
Способ, указанный в работе /5/, принят в качестве прототипа. В нем так же, как в работе /4/, одновременно идентифицируются параметры составляющих коэффициентов аэродинамических моментов, а первая часть задачи идентификации заменяется анализом данных, получаемых в аэродинамических трубах, либо использованием опыта, полученного при летных испытаниях предыдущих компановок ЛА.
Использование перечисленных форм тестовых сигналов без решения первой задачи идентификации, при наличии взаимной корреляции в измеренных переходных процессах и нелинейного характера идентифицируемых зависимостей, как правило, не дает достоверных результатов.
Кроме того, резкие изменения величин управляющих воздействий при использовании перечисленных выше разрывных тестовых сигналов обуславливает выходы приводов автопилота на ограничения по скорости движения. Это приводит к размыканию системы автоматической стабилизации, что уменьшает ее надежность на тестовом режиме полета.
Эти обстоятельства указывают на необходимость рационального выбора входного тестового сигнала для реализации возмущенного движения на тестовом режиме полета (на котором накапливается информация для последующего выявления зависимостей аэродинамических характеристик от определяющих параметров движения ЛА).
Таким образом, рассмотренный в /5/ способ снижает надежность функционирования ЛА и точность оценок аэродинамических характеристик, получаемых по результатам летных испытаний.
Изобретение направлено на повышение точности идентификации аэродинамических характеристик автоматически управляемого летательного аппарата по результатам натурных испытаний, а также безопасности полетов за счет повышения надежности работы ситемы автоматической стабилизации ЛА на тестовых режимах движения.
Сущность изобретения состоит в том, что в известном способе идентификации аэродинамических характеристик автоматически управляемых летательных аппаратов по результатам летных испытаний, содержащем подачу на входы приводов автопилота тестовых сигналов (в дополнение к сигналам стабилизации), возбуждение движения, измерение параметров движения и последующее определение текущих значений коэффициентов аэродинамических моментов и их функциональных зависимостей от определяющих переменных (углов атаки, скольжения и углов отклонения рулей при известных демпфирующих производных), тестовые сигналы формируют из низко- и высокочастотных гармонических составляющих. Высокочастотные гармонические составляющие определяют из условия обеспечения вариаций составляющих момента от углов атаки или скольжения в несколько раз меньших по сравнению с наибольшими из вариаций составляющих момента, обусловленных отклонениями рулей, ограничения допустимых значений скорости приводов автопилота и вариаций углов отклонений рулей, максимально перекрывающих их рабочий диапазон. Формируют по коэффициентам усиления и фазе компенсирующий сигнал из высокочастотной составляющей тестового сигнала. На даче руля направления для компенсации реакции элерона на высокочастотную составляющую тестового сигнала руля направления последнюю включают в тестовой сигнал элерона в измененном по фазе и амплитуде виде. Указанные фазу и амплитуду подбирают при предполетном моделировании из условия максимального подавления реакции элерона.
Аналогичным образом подбирают фазу и амплитуду сигнала для подавления высокочастотной реакции руля направления на даче элерона.
Частоты и амплитуды низкочастотной составляющей определяют из условия обеспечения необходимых областей изменения углов атаки и скольжения.
Тестовые сигналы последовательно подают в продольный и боковой каналы, при этом в продольном канале воздействуют низко - и высокочастотной гармоническими составляющими на привод руля высоты одновременно. В боковом канале низкочастотную гармоническую составляющую подают на привод одного из рулей, обеспечивая на части тестового режима углы скольжения, близкие к нулю, и затем изменение их значений от минимума до максимума, при этом высокочастотные составляющие тестового сигнала последовательно подают на входы приводов руля направления и элерона, а возбуждаемые ими, соответственно, вынужденные движения элерона и руля направления подавляют на одном из рулей компенсирующим сигналом.
При обработке летных данных последовательно определяют, (по информации части тестового режима) вначале - форму и параметры зависимостей составляющих коэффициентов аэродинамических моментов от углов отклонений рулей для каждого из периодов высокочастотного вынужденного движения в продольном канале, либо, при малых значениях угла скольжения, для их последовательности в боковом канале. Это производят по разностям экспериментальных суммарных значений коэффициентов аэродинамических моментов и малых расчетных составляющих (поправок) от небольших вариаций угла атаки (скольжения), неточно скомпенсированных вариаций угла отклонения руля направления (элерона), угловых скоростей. Указанные поправки берутся по данным банка аэродинамических характеристик. Это дает возможность определить эффективности рулей - зависимости составляющих коэффициентов аэродинамических моментов в виде функций одного переменного, соответственно, от углов отклонений руля высоты, направления и элерона. Затем, с их использованием, по информации всего тестового режима полета определяют форму и параметры зависимостей составляющих коэффициентов аэродинамических моментов от углов атаки, либо скольжения.
Способ поясняется фиг. 1-6.
На фиг. 1 представлены результаты летного моделирования для продольного канала: тестовый сигнал и параметры движения ЛА, возбужденные его воздействием, где
TS-1 - форма тестового сигнала, поступающего на вход привода руля высоты,
DV-2 - угол отклонения руля высоты,
WZ-3 - угловая скорость тангажа,
ALFA-4 - угол атаки,
T-5 - время.
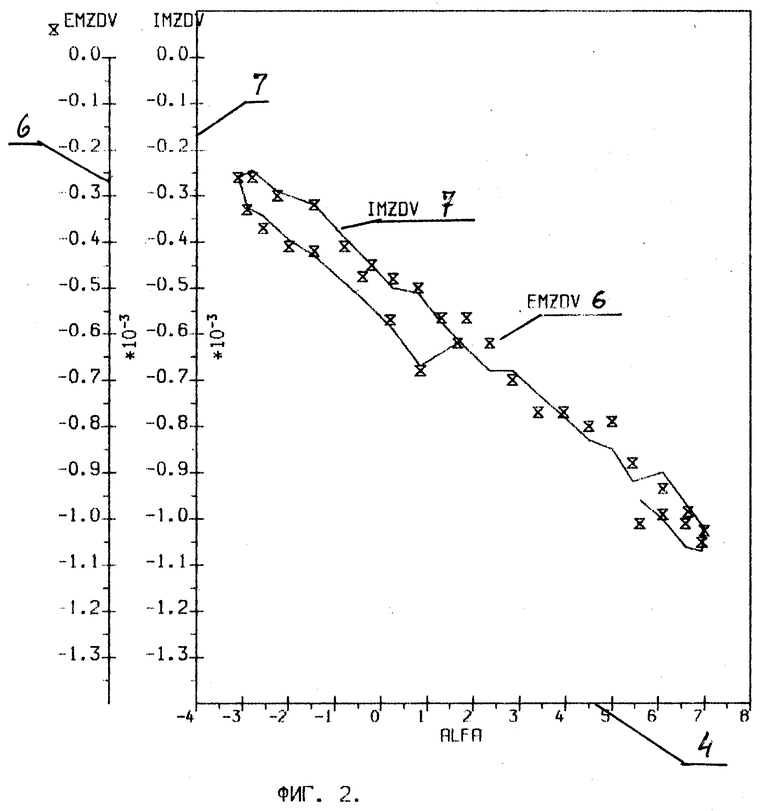
На фиг. 2 приведены результаты определения нелинейной зависимости эффективности руля высоты по углу атаки, где
EMZDV-6 - экспериментальная зависимость частной производной составляющей момента по углу отклонения руля;
IMZDV-7 - истинные значения этой производной,
ALF-4 - угол атаки.
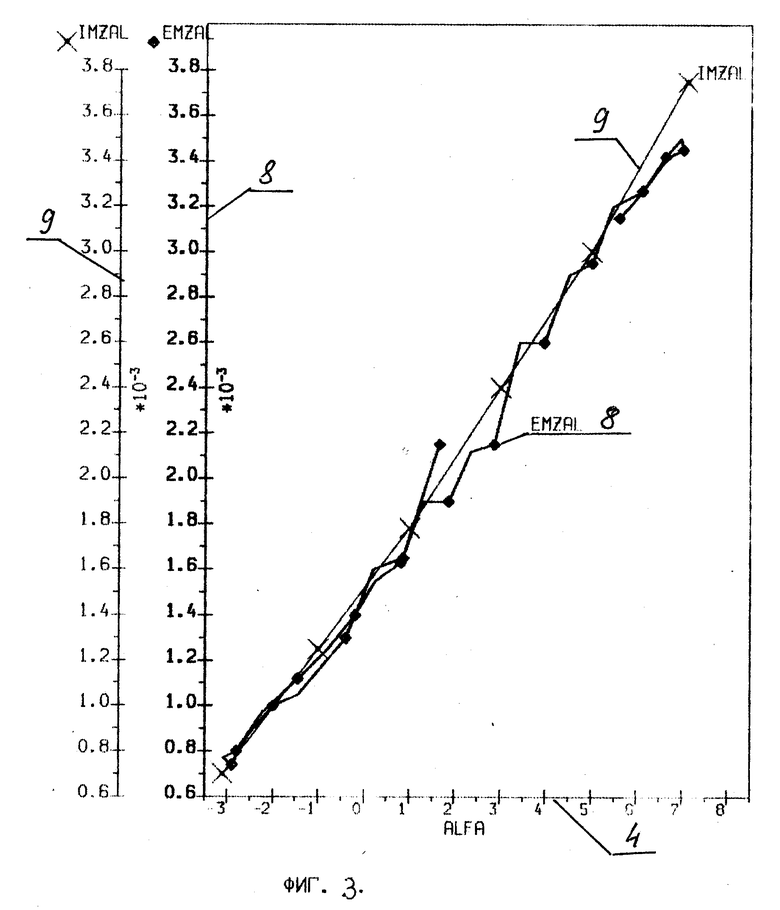
На фиг. 3 представлены зависимости составляющих коэффициента аэродинамического момента от угла атаки в продольном канале, где
EMZA-8 - экспериментальная зависимость, IMZA-9 - истинная зависимость
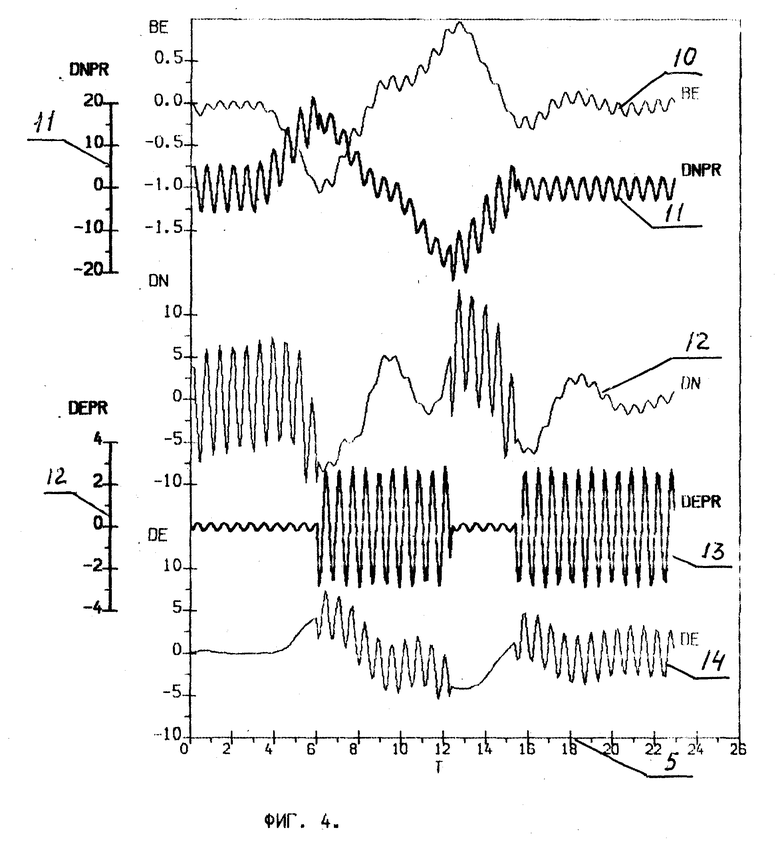
На фиг.4 показаны результаты предполетного моделирования для выбора параметров тестовых сигналов в боковом канале (курса и крена) и параметры движения изделия, возбужденные их воздействием, где
BE-10 - угол скольжения,
DNPR-11 - тестовый сигнал, подаваемый на вход привода руля направления,
DN-12 - угол отклонения руля направления,
DEPR-13 - тестовый сигнал, подаваемый на вход привода элерона,
DE-14 - угол отклонения элерона.
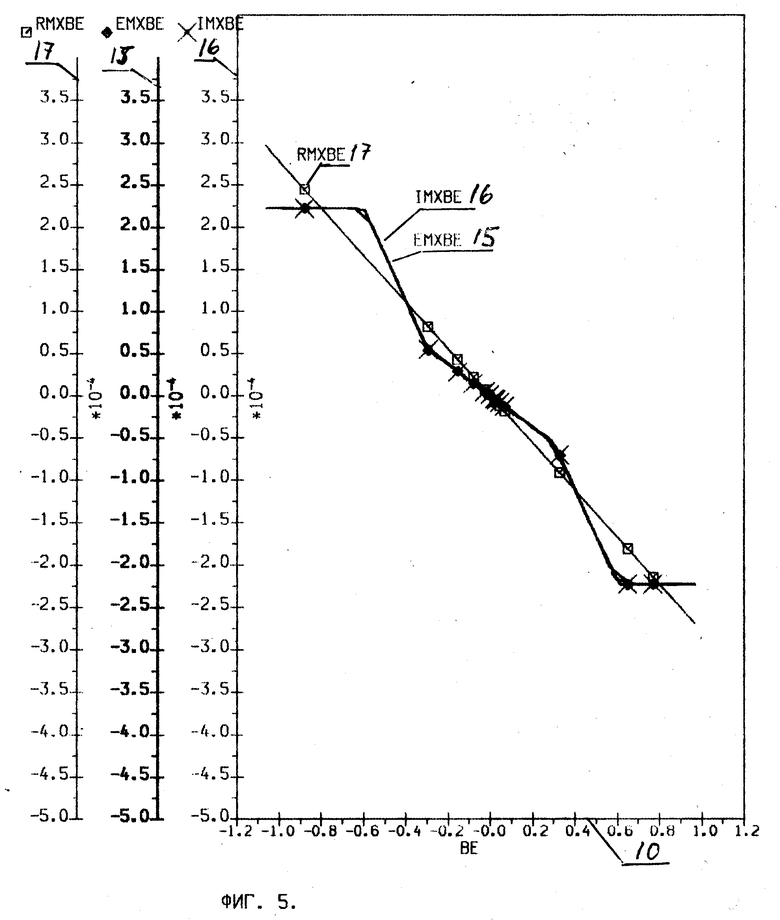
Фиг.5. Зависимости составляющей момента крена от угла скольжения, где
EMXBE-15 - экспериментальная зависимость,
IMXBE-16 - истинная зависимость,
RMXBE-17 - расчетная зависимость из банка.
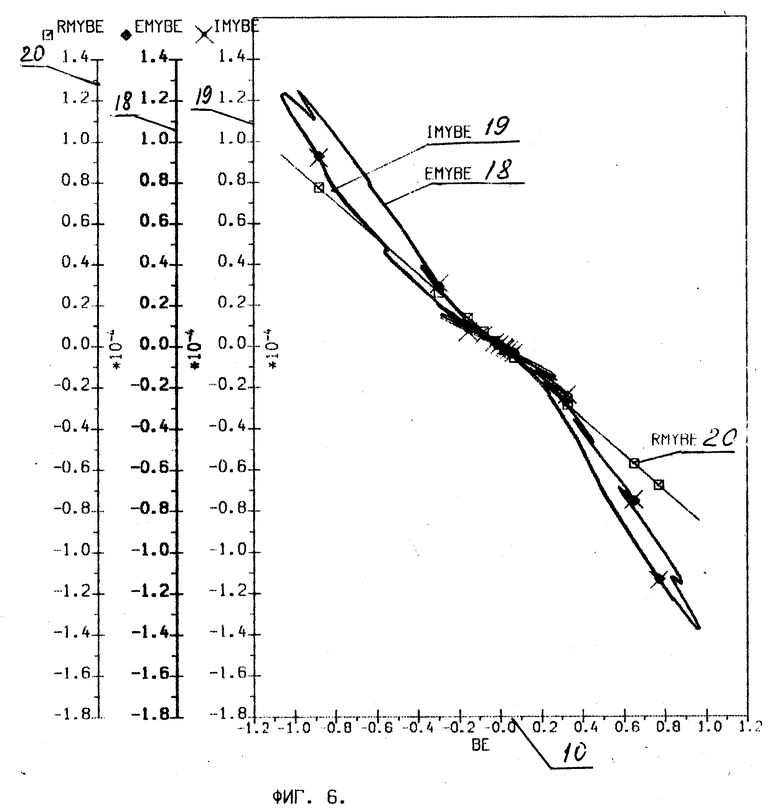
Фиг.6. Зависимости составляющей момента рыскания от угла скольжения, где
EMYBE-18 - экспериментальная зависимость,
IMYBE-19 - истинная зависимость,
RMYBE-20 - расчетная зависимость из банка.
При использовании предлагаемого способа производят предполетное моделирование для выбора параметров тестового сигнала. При этом предполагают известными исследования моделей ЛА в аэродинамических трубах, по которым зависимости коэффициентов аэродинамических сил и моментов сведены в банк аэродинамических характеристик. По технической документации на ЛА определяют геометрические, массовые характеристики, данные о моментах инерции, режимы полета, а также характеристики автопилота.
На основании полученных данных, использования уравнений движения ЛА формируют программу расчета на ЭВМ для исследования переходных процессов. Входные тестовые сигналы приняты гармонического вида, исходя из ограниченности производной, что обуславливает ограниченность скорости приводов автопилота и обеспечивает надежность функционирования контура стабилизации ЛА, удобства выделения полезного сигнала при проведении сглаживания информации, малого объема задаваемых характеристик параметров (частота, амплитуда и фаза). Параметры тестовых сигналов, в частности, для бокового движения (частоту высокочастотной гармоники ωвн для руля направления и амплитуду) выбирают так, чтобы на даче руля направления высокочастотная составляющая тестового сигнала обеспечивала малое значение момента от скольжения по сравнению с моментом от руля направления. Его амплитуду выбирают из условия максимального отклонения руля направления во всем его рабочем диапазоне. Угол сдвига фазы и коэффициент усиления подавляющего сигнала на элерон выбирают из условия минимизации его отклонений на указанной частоте ωвн руля направления. На даче элерона, наоборот, минимизируют отклонения руля направления на высокой частоте ωвэ элерона.
Выбирают частоты и амплитуды низкочастотных гармоник из условия обеспечения необходимых областей изменения угла скольжения и желаемого соотношения частот низкочастотных и высокочастотных гармоник.
В продольном канале обе гармоники подают на вход привода руля высоты одновременно.
В боковом канале одновременно с высокочастотной составляющей на привод одного из рулей воздействуют низкочастотной составляющей, обеспечивающей на части тестового режима угол скольжения, близкий к нулю, а затем - углы скольжения от минимума до максимума.
Переходные процессы под действием тестового сигнала 1 для продольного движения в виде изменений углов атаки 4, отклонений руля высоты 2 и угловой скорости 3 указаны на фиг.1, а переходные процессы для бокового движения представлены на фиг.4. в виде изменений углов скольжения (BE) 10, отклонений руля направления 12, элерона 14 при воздействии тестовых сигналов, поступающих на входы приводов руля направления (DNPR-11) и элерона (DEPR-13), сопровождаемые попеременной компенсацией высокочастотных колебаний руля направления, элерона.
Данные тестового сигнала вводят в бортовую цифровую вычислительную машину летательного аппарата и производят полет с подачей тестовых сигналов (в дополнение к сигналам стабилизации) на входы приводов автопилота для исследуемых режимов.
Измеряют параметры возмущенного движения. Далее при обработке информации определяют текущие суммарные значения коэффициентов аэродинамических моментов и их функциональных зависимостей от определяющих переменных.
Из фиг. 1 видно, что на высокочастотном движении приращения суммарного момента определяются, в основном, приращениями момента от угла отклонения руля высоты, т.к. на этой частоте вариации угла атаки малы, поэтому экспериментальную составляющую момента от угла отклонения руля высоты целесообразно вычислить в виде разности суммарного момента и малой поправки - составляющей момента от угла атаки (которую вычисляют по данным банка) с учетом расчетной составляющей демпфирующего момента. Это дает возможность по приращениям определить функцию одного переменного - значение производной коэффициента аэродинамического момента по углу отклонения руля высоты от угла атаки. Исходя из этого, для продольного движения определяют сначала эффективность руля высоты от угла атаки 4 (фиг.2), после этого вычитают из суммарного коэффициента момента составляющую от фактического угла отклонения руля и определяют другую функцию одного переменного в виде зависимости составляющей момента от угла атаки в функции угла атаки 8 (фиг.3).
Для оценки точности зависимостей коэффициентов аэродинамических моментов, полученных при обработке данных летных испытаний, на ЭВМ по предлагаемому способу проведен машинный эксперимент - имитационное моделирование. Это позволило сформировать истинные зависимости эффективности руля высоты 7 и составляющей момента от угла атаки 9, и сравнить их с получаемыми оценками - экспериментальными зависимостями 6,8, а также выявить фактические погрешности, получаемые при использовании данного способа.
В приведенном примере реальные свойства измерительной аппаратуры, применяемой при летных испытаниях, отображались в виде аддитивного "белого шума" со средними квадратическими погрешностями σΔωz = 0,01%, σΔα = 0,07o, σΔδb = 0,7o, а также задания частоты регистрации f = 100 Гц. Точность результатов по эффективности руля высоты - EMZDV-6, указанной на фиг. 2, характеризуется значением СКО = 0,25•10-4 1/град; для данных 8,9 фиг. 3 невязка экспериментальных и истинных значений характеризуется среднеквадратическим отклонением СКО = 0,9•10-4, что составляет, соответственно, 2,5 и 2,4% от максимальных абсолютных значений указанных функций.
Во втором примере для бокового движения иллюстрируют возможность применения способа для случая существенного различия в форме составляющих коэффициента аэродинамического момента от угла скольжения (истинные зависимости IMXBE-16, IMYBE-19 приняты нелинейными, в отличие от линейного представления расчетных зависимостей - RMXBE-17, RMYBE-20, принятых в банке АДХ). Кроме того, значения расчетных эффективностей элерона в каналах крена и курса отличаются на 30 и 20%, а руля направляния - на 10 и 30% от истинных значений. Производные составляющей коэффициента момента от угла скольжения при BE = 0 приняты отличающимися на 30%.
Для каналов курса и крена при предполетном моделировании производится выбор параметров тестовых сигналов и регистрируются переходные процессы, возбуждаемые их воздействием (фиг.4). Для бокового движения вначале (с учетом демпфирующих моментов), для участка возмущенного движения, соответствующего даче руля направления, когда подается высокочастотная гармоника с частотой ωвн на руль направления, а движение элерона на этой частоте компенсируется - для режима полета с малыми вариациями угла скольжения (на фиг. 4 это соответствует интервалу времени T = 0 - 3,6 с), при использовании в качестве поправки составляющих момента от угла скольжения (по данным банка аэродинамических характеристик) определяются зависимости составляющих коэффициента аэродинамического момента курса и крена от угла отклонения руля направления. Также для участка дачи элерона с малыми значениями угла скольжения (на фиг. 4 это соответствует интервалу времени t = 17...23 с) определяются зависимости составляющих крена и курса от угла отклонения элерона. По данным участка дачи руля направления при малых углах скольжения определяют значения производной момента крена по углу скольжения, на участке дачи элерона определяют производную курса по углу скольжения.
Далее полученные экспериментальные зависимости составляющих момента от углов отклонения руля направления и элерона используют как измерительное средство для выделения экспериментальных зависимостей составляющих моментов крена 15 (фиг.5) и курса 18 (фиг.6) от угла скольжения для всего интервала времени действия тестового сигнала. Методические относительные погрешности идентификации для первого приближения по эффективности элерона составляют  3,3%,
3,3%,  0,023%, для руля направления
0,023%, для руля направления  0,62%,
0,62%,  0,05%. Средние квадратические погрешности (невязка 15, 16) нелинейных характеристик боковой устойчивости при этом равны σΔmx(β) = 6,2•10-6 применительно к фиг. 5), σΔmy(β) = 1,10-6 (применительно к фиг.6), 18, 19, что соответственно составляет ~ 1,3 и 0,38% от размаха (диапазона изменений) этих зависимостей.
0,05%. Средние квадратические погрешности (невязка 15, 16) нелинейных характеристик боковой устойчивости при этом равны σΔmx(β) = 6,2•10-6 применительно к фиг. 5), σΔmy(β) = 1,10-6 (применительно к фиг.6), 18, 19, что соответственно составляет ~ 1,3 и 0,38% от размаха (диапазона изменений) этих зависимостей.
Как видно из рассмотрения приведенных примеров, предлагаемый способ определения коэффициентов аэродинамических моментов ЛА является примером проведения идентификации "в большом", когда соединяются обе проблемы идентификации:
- определение вида модели движения,
- оценивание параметров выявленной модели.
Его применение позволит увеличить объективность и надежность определения указанных характеристик, расширить класс идентифицируемых зависимостей (включением случая неоднозначных функций фиг.6), а также повысить надежность проведения летного эксперимента (по сравнению со случаем применения телеграфного сигнала), проводимого с целью идентификации аэродинамических характеристик ЛА.
Источники информации.
1. В.С. Ведров, М.А. Тайц. Летные испытания самолетов. Оборонгиз, 1951, с. 326-330.
2. И. М. Пашковский. Динамика и управляемость самолета. -М.: Машиностроение, 1987, с. 188-213.
3. В.А. Касьянов, Е.П. Ударцев. Определение характеристик судов методами идентификации. -М.: Машиностроение, 1988, с. 147, 148.
4. Л. Льюинг. Идентификация систем. Теория для пользователя. Наука, Физматлит, перевод на русский язык, 1991, с. 320, 321.
5. Методы исследований на летающих моделях. Справочная библиотека авиационного инженера - испытателя. Летные испытания самолетов и вертолетов. Под общей редакцией А.Д. Миронова. -М.: Машиностроение, 1988, с. 52 - 55.
Использование: аэрокосмическая техника, при летных испытаниях новых летательных аппаратов (ЛА), либо режимов полета для создания информационной части самонастраивающихся автопилотов. Сущность изобретения: в продольном канале ЛА на привод руля высоты воздействуют одновременно высоко- и низкочастотной гармоническими составляющими тестового сигнала. Низкочастотными составляющими обеспечивают необходимую область изменения углов атаки и скольжения. В боковой канал высокочастотные составляющие подают последовательно на вход привода руля направления и элерона, а возбужденные ими вынужденные движения соответственно на элероне и руле направления подавляют на одном из рулей компенсирующим сигналом. Регистрируют параметры движения, отклонения рулей последовательно для каждого из периодов высокочастотного движения в продольном канале либо для их последовательности при малых значениях угла скольжения боковом канале, определяют эффективность рулей высоты, направления и элерона в виде зависимостей составляющих коэффициентов аэродинамического момента от углов отклонения рулей, а затем с их использованием определяют зависимости коэффициентов аэродинамического момента от углов атаки и скольжения - для всего тестового режима. 6 ил.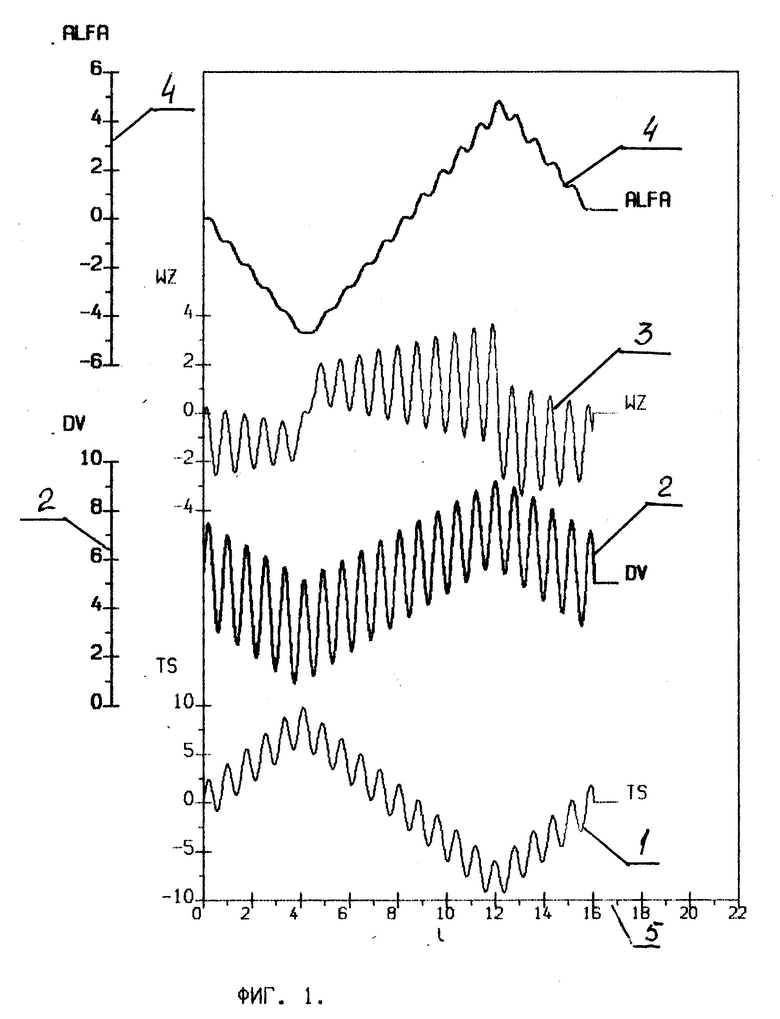
Способ идентификации аэродинамических характеристик автоматически управляемых летательных аппаратов по результатам испытаний, содержащий подачу на входы приводов автопилота тестовых сигналов, возбуждение движения, измерение параметров движения летательного аппарата, отличающийся тем, что тестовые сигналы формируют из низко- и высокочастотных гармонических составляющих, высокочастотные составляющие определяют из условия обеспечения вариаций составляющих момента от углов атаки или скольжения, в несколько раз меньших по сравнению с наибольшими из вариаций составляющих момента, обусловленных отклонениями рулей, ограничения допустимых значений скорости приводов автопилота и вариаций углов отклонений рулей, максимально перекрывающих их рабочий диапазон, а частоты и амплитуды низкочастотной составляющей определяют из условия обеспечения необходимых областей изменения углов атаки и скольжения, тестовые сигналы последовательно подают в продольный и боковой каналы, воздействуют на привод руля высоты низко- и высокочастотными гармоническими составляющими одновременно, в боковом канале высокочастотные гармонические составляющие последовательно подают на входы привода руля направления и элерона, а возбуждаемые ими вынужденные движения на элероне либо руле направления соответственно подавляют, одновременно на привод одного из рулей воздействуют низкочастотной составляющей, обеспечивающей на части тестового режима угол скольжения, близкий к нулю, а затем изменение углов скольжения от минимума до максимума, производят регистрацию параметров движения, отклонений рулей, при обработке информации последовательно для каждого из периодов высокочастотного движения в продольном канале либо для их последовательности при малых значениях угла скольжения в боковом канале определяют эффективности рулей высоты, направления и элерона по разностям экспериментальных суммарных значений коэффициентов аэродинамического момента и другими их малыми расчетными составляющими, взятых по данным банка аэродинамических характеристик, после этого с их использованием определяют зависимости составляющих коэффициентов аэродинамического момента от угла атаки и скольжения для всего тестового режима.
| Методы исследований на летающих моделях | |||
| Справочная библиотека авиационного инженера-испытателя "Летные испытания самолетов и вертолетов."/Под общей редакцией А.Д.Миронова | |||
| - М.: Машиностроение, 1988, с.52-55. |
