Изобретение относится к измерительной технике, а именно к маятниковым компенсационным акселерометрам с магнитоэлектрическим силовым преобразователем.
Известен способ возбуждения опор трения акселерометра путем задания относительного движения опор в направлении вращения подшипников с помощью специального двигателя [1]
Наибольшим эффектом по снижению трения в акселерометре характеризуется способ, заключающийся в движении опор в направлении оси вращения с помощью электромагнита, принятый за прототип [2]
Недостатком этого способа является неполное устранение трения в опорах, что является причиной заметного дрейфа выходного сигнала акселерометра.
Целью изобретения является повышение точности измерений акселерометра.
Цель достигается способом возбуждения опор трения акселерометра, имеющего корпус, маятниковый чувствительный элемент, цапфу на чувствительном элементе и подшипник скольжения на корпусе, датчик перемещения с катушкой ротора на чувствительном элементе и обмоткой возбуждения статора в корпусе, генератор питания, датчик перемещения, магнитоэлектрический силовой преобразователь с компенсационной катушкой на чувствительном элементе и магнитной системой в корпусе, электромагнит с обмоткой возбуждения, усилитель, заключающийся в том, что в режиме предварительных испытаний задают принудительное знакопеременное движение относительно друг друга цапфы и подшипника путем подачи сигнала переменного тока от источника периодического сигнала к элементам акселерометра, тем, что осуществляют одновременное поступательное движение подшипника относительно цапфы в направлении оси вращения цапфы и колебательное угловое движение цапфы относительно подшипника путем подачи моночастотного сигнала переменного тока от единого источника периодического сигнала в обмотку возбуждения электромагнита и компенсационную катушку силового преобразователя, при этом после подачи сигнала одновременно из двух вариантов полярностей включения обмотки возбуждения статора датчика перемещения относительно его генератора питания и катушки ротора датчика перемещения относительно входных клемм усилителя при неизменной полярности включения обмотки возбуждения электромагнита и компенсационной катушки силового преобразователя относительно источника периодического сигнала, компенсационной катушки силового преобразователя относительно выходных клемм усилителя выбирают вариант полярностей включения обмотки возбуждения статора и катушки ротора датчика перемещения, при котором определяемый по результатам измерения выходного сигнала акселерометра дрейф выходного сигнала акселерометра минимален, включают между источником периодического сигнала и компенсационной катушкой силового преобразователя фазосдвигающий элемент, например конденсатор, изменяют фазовый сдвиг между напряжениями питания обмотки возбуждения электромагнита и компенсационной катушки путем изменения параметров фазосдвигающего элемента, определяя при этом дрейф сигнала акселерометра по результатам измерения выходного сигнала акселерометра, выбирают фазовый сдвиг, фиксируя соответствующие параметры фазосдвигающего элемента, при котором дрейф сигнала акселерометра минимален, причем в режиме эксплуатации операции выбора полярности и фазы не производится.
При осуществлении одновременного поступательного движения подшипника относительно цапфы в направлении оси вращения цапфы и колебательного углового движения цапфы относительно подшипника путем подачи моночастотного сигнала переменного тока от единого источника периодического сигнала в обмотку возбуждения электромагнита и компенсационную катушку силового преобразования при выбранном варианте полярностей включения обмотки возбуждения статора датчика перемещения и катушки ротора датчика перемещения и выбранной величине фазового сдвига между напряжениями питания обмотки возбуждения электромагнита и компенсационной катушки обеспечивается максимально возможно суммарное перемещение по двум направлениям движения цапфы относительно подшипника, что увеличивает скорость ее движения и снижает трение в опоре. В результате уменьшается дрейф выходного сигнала акселерометра и повышается точность измерений акселерометра.
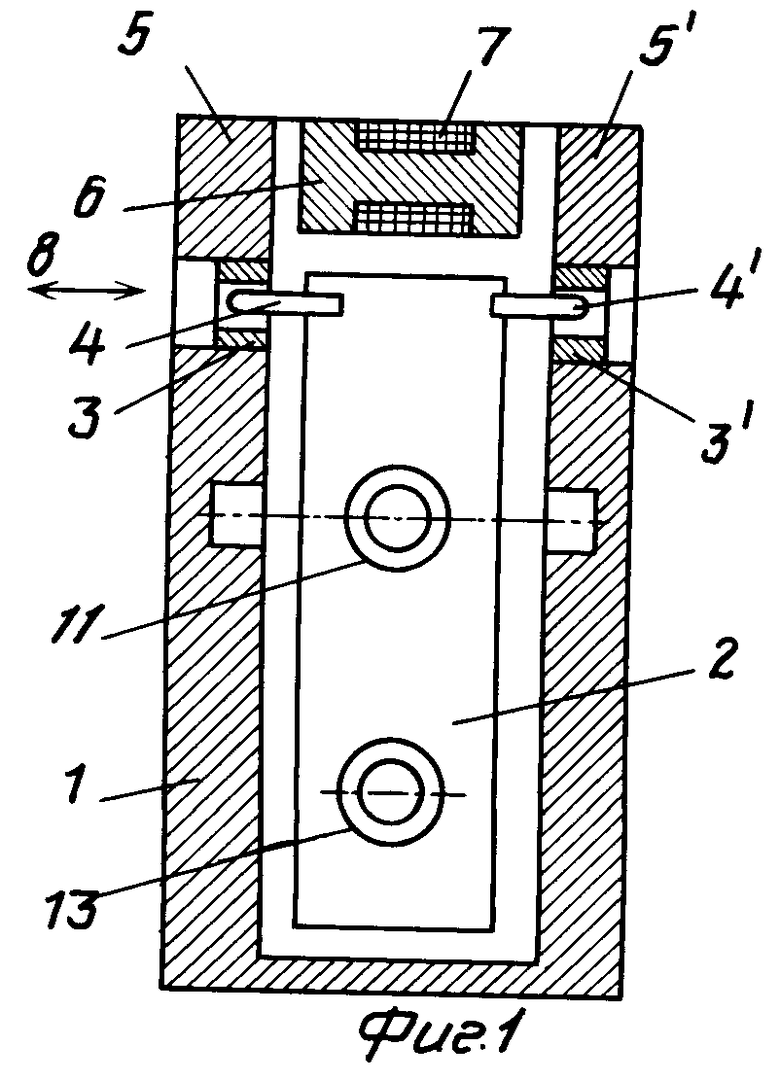
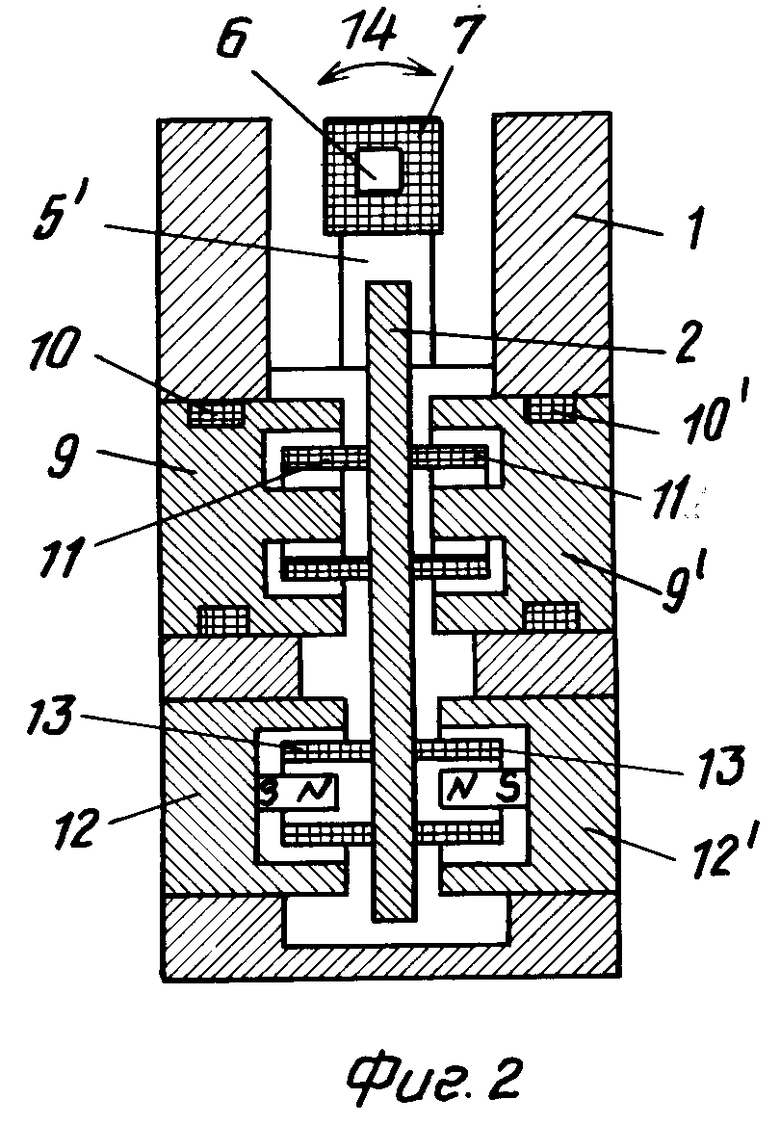
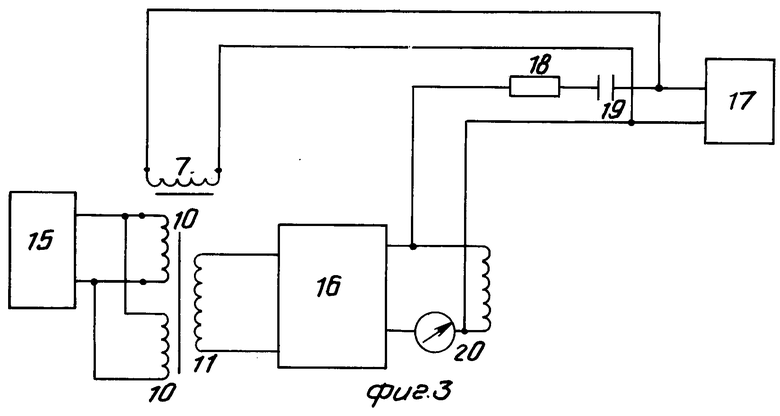
На фиг.1, 2 представлена конструкция акселерометра; на фиг.3 схема осуществления способа возбуждения опор.
В корпусе 1 акселерометра установлен маятниковый чувствительный элемент 2, подвешенный на опоре трения с подшипниками 3,3' скольжения в корпусе 1 и цапфами 4,4' на чувствительном элементе 2 (фиг.1). Подшипники 3,3' установлены на стойках 5,5' корпуса 1, между которыми закреплен электромагнит 6 с обмоткой 7 возбуждения. Стойки 5,5' вместе с подшипниками 3,3' имеют возможность колебательного движения по стрелке 8, которая является осью вращения цапф 4,4'.
В корпусе 1 установлен датчик перемещения с его статорами 9,9', на каждом из которых имеется соответствующая обмотка 10 возбуждения (фиг.2). На чувствительном элементе 2 находится катушка ротора 11 датчика перемещения. Магнитоэлектрический силовой преобразователь состоит из двух магнитных систем 12,12' в корпусе 1 и компенсационной катушки 13 на чувствительном элементе 2. Чувствительный элемент 2 имеет свободу углового движения по стрелке 14.
Обмотки 10,10' возбуждения статора датчика перемещения подключены к генератору 15 питания датчика перемещения (фиг.3). К входным клеммам усилителя 16 подключена катушка ротора 11 датчика перемещения, к выходным клеммам компенсационная катушка 13 силового преобразователя. К источнику 17 моночастотного периодического сигнала переменного тока подключена обмотка 7 возбуждения электромагнита 6, а также через последовательно соединенные резистор 18 и конденсатор 19 компенсационная катушка 13 силового преобразователя. Резистор 18 и конденсатор 19 составляет фазосдвигающую цепочку. Возможно в качестве фазосдвигающей цепочки использовать омическое сопротивление компенсационной катушки 13 силового преобразователя и конденсатор 19. Для измерения выходного сигнала акселерометра последовательно с компенсационной катушкой 13 включен миллиамперметр 20.
Способ осуществляется следующим образом.
От источника 17 подают моночастотный сигнал переменного тока в обмотку 7 возбуждения электромагнита 6. При этом стойки 5,5' колеблются относительно корпуса 1 в направлении оси 8 вращения. Тогда возникает и знакопеременное поступательное движение подшипников 3,3' относительно цапф 4,4' в направлении оси 8 вращения. Одновременно от единого источника 16 периодического сигнала подают тот же моночастотный сигнал переменного тока в компенсационную катушку 13 силового преобразователя. В результате прохождения переменного тока создаваемое переменное магнитное поле компенсационной катушки 13 взаимодействует постоянным магнитным полем магнитных систем 12,12', что вызывает перемещение чувствительного элемента 2, которое с помощью наводимого обмоткой 10 возбуждения статора в катушке ротора 11 датчика перемещения преобразуется в электрический сигнал. Этот сигнал после преобразования и усиления в усилителе 16 поступает в компенсационную катушку 13 силового преобразователя, где возникают переменные моменты, вызывающие колебательное угловое движение чувствительного элемента 2 относительно корпуса 1 в направлении стрелки 14. При этом создается колебательное угловое движение цапф 4,4' относительно подшипников 3,3'. Таким образом осуществляется одновременное поступательное движение подшипника относительно цапфы в направлении оси вращения цапфы и колебательное угловое движение цапфы относительно подшипника путем подачи моночастотного сигнала переменного тока от единого источника периодического сигнала в обмотку возбуждения электромагнита и компенсационную катушку.
Для устранения влияния переменных моментов силового преобразователя на выходной сигнал акселерометра частота генератора 17 выбирается больше собственной частоты следящей системы акселерометра. Так, для акселерометра с собственной частотой 200 Гц выбрана частота сигнала генератора 17 величиной 400 Гц. Амплитуду подаваемого в компенсационную катушку 13 переменного тока подбирают экспериментально. При испытаниях акселерометра с помощью данного способа положительный эффект достигнут при амплитуде тока, соответствующей ускорению 50 м/с2.
Одновременно с этими операциями выбирают полярности включения элементов акселерометра. Для этого подсоединяют обмотки 10,10' возбуждения статора датчика к генератору 15 питания, катушку ротора 11 датчика перемещения к входным клеммам усилителя 16, компенсационную катушку 13 силового преобразователя к выходным клеммам усилителя 16 в первом варианте полярности их сигналов, обеспечивающем отрицательную обратную связь следящей системы акселерометра.
Обмотку 7 возбуждения электромагнита 6 и компенсационную катушку 13 подключают к источнику 17 периодического сигнала в произвольной полярности. При режиме возбуждения опор в соответствии с настоящим способом измеряют с помощью миллиамперметра 20 выходной сигнал акселерометра и по нему определяют характеристики дрейфа выходного сигнала акселерометра.
После этого переходят к второму варианту включения элементов акселерометра, подсоединив в противоположной полярности сигналов обмотки 10,10' возбуждения статора датчика перемещения к генератору 15 питания, катушку ротора 11 датчика перемещения к входным клеммам усилителя 16 и оставив неизменной полярность подключения компенсационной катушки 13 к выходным клеммам усилителя 16, обмотки 7 возбуждения электромагнита 6, компенсационной катушки 13 к источнику 17 периодического сигнала. Измеряют с помощью миллиамперметра 20 выходной сигнал акселерометра и по нему определяют характеристики дрейфа выходного сигнала акселерометра при втором варианте полярностей включения элементов акселерометра.
Из двух вариантов включения выбирают вариант, при котором дрейф выходного сигнала акселерометра минимален, а в этой полярности подсоединяют окончательно обмотки 10,10' возбуждения датчика перемещения к генератору 15 питания, катушку ротора 11 датчика перемещения к входным клеммам усилителя 16, компенсационную катушку 13 силового преобразователя к выходным клеммам усилителя 16, обмотку 7 возбуждения электромагнита 6, компенсационную катушку 13 к источнику 17 периодического сигнала.
Затем в цепь питания компенсационной катушки 13 от источника 17 периодического сигнала включают фазосдвигающие элементы, например резистор 18 и конденсатор 19 или один конденсатор 19. Изменяют фазовый сдвиг между напряжениями питания обмотки 7 возбуждения электромагнита 6 и компенсационной катушки 13 путем изменения параметров фазосдвигающего элемента, например емкости конденсатора 19, и при различных значениях емкости конденсатора определяют дрейф выходного сигнала акселерометра по результатам измерения его выходного сигнала с помощью миллиамперметра 20. Сравнивая значение дрейфа, выбирают фазовый сдвиг, а следовательно, величину емкости конденсатора, при которой дрейф выходного сигнала акселерометра минимален. Затем окончательно включают между компенсационной катушкой 13 и источником 17 периодического сигнала конденсатор 19 выбранной емкости, при которой дрейф выходного сигнала акселерометра минимален.
Установление режимов возбуждения опор трения акселерометра, выбор варианта полярностей включения элементов акселерометра, фазового сдвига осуществляются на стадии конструирования.
Функционирование акселерометра в заранее выбранных режимах возбуждения опор трения и варианте полярностей включения элементов акселерометра и фазовом сдвиге осуществляется при эксплуатации акселерометра при измерениях ускорений.
Выбор полярностей включения элементов акселерометра необходим для того, чтобы направление поступательного движения подшипника относительно цапфы и направление углового движения цапфы относительно подшипника обеспечивали максимальное суммарное перемещение, а следовательно, и скорость движения цапфы относительно подшипника.
Выбор фазового сдвига необходим для компенсации фазовых сдвигов в элементах акселерометра, создаваемых, например, усилителем, индуктивными сопротивлениями обмотки возбуждения электромагнита, обмотки возбуждения статора датчика перемещения и т.д. и вызывающих изменение направления перемещения цапфы относительно подшипника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2119645C1 |
| Способ компенсации нелинейности акселерометра | 1975 |
|
SU690395A1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2018133C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1985 |
|
SU1344052A1 |
| Компенсационный акселерометр | 1990 |
|
SU1795374A1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825144A1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825143A1 |
| АКСЕЛЕРОМЕТР | 2012 |
|
RU2514150C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
Использование: измерительная техника, в частности маятниковые компенсационные акселерометры с магнитоэлектрическим силовым преобразователем. Сущность изобретения: способ возбуждения опор трения акселерометра заключается в задании принудительного знакопеременного движения относительно друг друга цапфы и подшипника путем подачи сигнала переменного тока к элементам акселерометра так, что в режиме предварительных испытаний осуществляют одновременное поступательное движение подшипника относительно цапфы и колебательное угловое движение цапфы относительно подшипника путем подачи моночастотного сигнала переменного тока от единого источника в обмотку возбуждения электромагнита возбуждения опор и компенсационную катушку силового преобразователя. При этом подбирают полярности включения элементов акселерометра, фазовый сдвиг между напряжениями питания обмотки возбуждения электромагнита и компенсационной катушки исходя из условия получения минимального дрейфа выходного сигнала акселерометра. В режиме эксплуатации операция выбора полярностей и фазы не производится. 3 ил.
СПОСОБ ВОЗБУЖДЕНИЯ ОПОР ТРЕНИЯ АКСЕЛЕРОМЕТРА, имеющего корпус, маятниковый чувствительный элемент, цапфу на чувствительном элементе и подшипник скольжения на корпусе, датчик перемещения с катушкой ротора на чувствительном элементе и обмоткой возбуждения статора в корпусе, генератор питания датчика перемещения, магнитоэлектрический силовой преобразователь с компенсационной катушкой на чувствительном элементе и магнитной системой в корпусе, электромагнит с обмоткой возбуждения, усилитель,заключающийся в том, что в режиме предварительных испытаний задают принудительное знакопеременное движение относительно друг друга цапфы и подшипника путем подачи сигнала переменного тока от источника периодического сигнала к элементам акселерометра, отличающийся тем, что осуществляют одновременное поступательное движение подшипника относительно цапфы в направлении оси вращения цапфы и колебательное движение цапфы относительно подшипника путем подачи моночастотного сигнала переменного тока от единого источника периодического сигнала в обмотку возбуждения электромагнита и компенсационную катушку, при этом после подачи сигнала одновременно из двух вариантов полярностей включения обмотки возбуждения статора датчика перемещения относительно его генератора питания и катушки ротора датчика перемещения относительно входных клемм усилителя при неизменной полярности включения обмотки возбуждения электромагнита и компенсационной катушки силового преобразователя относительно источника периодического сигнала, компенсационной катушки силового преобразователя относительно выходных клемм усилителя выбирают вариант полярностей включения обмотки возбуждения статора и катушки ротора датчика перемещения, при котором определяемый по результатам измерения выходного сигнала акселерометра дрейф сигнала акселерометра минимален, включают между источником периодического сигнала и компенсационной катушкой силового преобразователя фазосдвигающий элемент, например конденсатор, изменяют фазовый сдвиг между напряжениями питания обмотки возбуждения электромагнита и компенсационной катушки путем изменения параметров фазосдвигающего элемента, определяя при этом дрейф сигнала акселерометра по результатам измерения выходного сигнала акселерометра, выбирают фазовый сдвиг, фиксируя соответствующие параметры фазосдвигающего элемента, при котором дрейф сигнала акселерометра минимален, причем в режиме эксплуатации операция выбора полярностей и фазы не производится.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Акселерометр | 1975 |
|
SU605181A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
